 如何使用ADI FRC IMU板補償車輪傳動速率
如何使用ADI FRC IMU板補償車輪傳動速率

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
ADI
+關注
關注
148文章
46036瀏覽量
260062 -
機器人
+關注
關注
213文章
29600瀏覽量
212126 -
速率
+關注
關注
0文章
39瀏覽量
18259
發布評論請先 登錄
相關推薦
熱點推薦
ADI人形機器人的“感覺神經 + 電力神經元”核心芯片方案盤點
作為全球領先的模擬/混合信號芯片公司,憑借其在 傳感器、信號鏈、精密模擬、功率管理與接口技術 方面的深厚積累,已成為人形機器人核心組件方案的重要供應商。 人形機器人核心模塊中ADI的貢獻: 模塊 關鍵芯片方案 功能描述 傳感感知系統 IMU、力/壓力傳感器、ToF、光學編
輪轂電機不平衡電磁力對車輪定位參數的影響
給車輪,對車輪定位參數產生一定的影響。針對上述問題,本文中以一款無減速機構輪轂電機驅動電動汽車為對象,在建立其傳動系動力學模型,、雙橫臂懸架動力學模型和輪轂電機不平衡電磁力數學模型的基礎上,深人分析了
發表于 06-10 13:17
求助,關于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
傳感器IMU是LSM6DSL型號,磁強計是LIS3MDL型號,使用motionfx庫進行姿態解算,遇到航向角不準確的問題。我查看地磁計的值是正常的,但是航向角不正常:例如傳感器指向正北,地磁計X軸
發表于 06-10 07:19

ST的IMU和地磁計用motionfx庫融合后航向角異常的原因?
傳感器IMU是LSM6DSL型號,磁強計是LIS3MDL型號,使用motionfx庫進行姿態解算,遇到航向角不準確的問題。我查看地磁計的值是正常的,但是航向角不正常:例如傳感器指向正北,地磁計X軸
發表于 04-23 08:11
Serder速率和以太網速率關系
Serder速率從56G向112G甚至224G演進,銅纜傳輸速率也將向224Gbps發展,目前以太網速率已從1Gbps提升至800Gbps,未來將向1.6Tbps方向發展。Serder速率

貿澤開售適用于工業自動化、機器人和智慧農業應用的 Analog Devices ADIS1657x MEMS IMU模塊
(ADI)全新ADIS1657x 精密微機電系統 (MEMS) 慣性測量單元 (IMU) 模塊。ADIS1657x MEMS IMU具有堅固耐用的三軸陀螺儀和加速度計,適用于導航、穩定、儀表、工廠和自主
發表于 03-31 15:25
?273次閱讀
汽車車輪焊接技術新突破:提升安全與效能
隨著科技的不斷進步,汽車行業也在不斷尋求新的技術突破,以提高車輛的安全性和性能。汽車車輪作為車輛行駛的重要組成部分,其制造技術和材料的選擇直接影響到整車的性能和安全性。近年來,汽車車輪焊接技術取得了
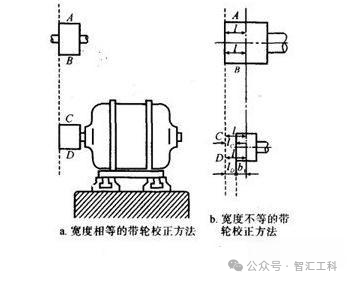
電動機傳動裝置的安裝和校正方法
電動機傳動裝置的安裝和校正方法對于確保電動機的正常運行至關重要。以下分別介紹齒輪傳動、皮帶傳動和聯軸器傳動這三種常見傳動裝置的安裝和校正方法
高精度IMU助力石油礦業精準作業
在石油、礦業等行業中,技術革新是推動發展的關鍵。IMU作為核心傳感器技術,能夠實時測量物體的角速度和加速度,提供關鍵的數據支持。為此,我們專為石油礦業推出了一款IMU ER-MIMU-09,旨在助力測井、采礦等作業實現更高的精度和效率。



無功補償隨機補償和隨器補償的區別
無功補償的隨機補償和隨器補償是兩種不同的補償策略,它們在應用場景、控制方法和效果上存在差異。 一、隨機補償 1、概述 隨機

如何在RTOS SDK中將FRC1計時器附加到NMI的信息?
我一直在尋找有關如何在 RTOS SDK 中將 FRC1 計時器附加到 NMI 的信息。我已經找到了 NON-OS SDK 所需的內容,但我找不到 RTOS SDK 的 NON-OS ETS_FRC_TIMER1_NMI_INTR_ATTACH(pwm_intr_hand
發表于 07-10 08:32
CY8C5888LTI-LP097讀取psoc creator 4.4中的bmx160 imu 9軸傳感器模塊,對電路板進行編程后putty什么也沒顯示,為什么?
我正在嘗試使用 putty 中的 cypress CY8C5888LTI-LP097 讀取 psoc creator 4.4 中的 bmx160 imu 9 軸傳感器模塊。 但在對電路板進行編程后,putty 什么也沒顯示。
發表于 07-04 06:28





 工商網監
工商網監
評論