 新發明的四翼飛行器可在短時間內不受束縛地飛行
新發明的四翼飛行器可在短時間內不受束縛地飛行

在近日的 Nature 雜志上,由 Robert J. Wood 教授領導的哈佛大學微機器人實驗室(Harvard’s Microrobotics Lab)展示了一個四翼版本的 RoboBee 平臺,并成功實現無束縛飛行。就外觀而言,該飛行器有兩大特色:一對額外的翅膀(四翼)和頂部的太陽能電池。它可以在短時間內不受束縛地飛行。
圖丨四翼飛行器 RoboBee(來源:哈佛微型機器人實驗室)四翼飛行器 RoboBee 長 5 厘米,重 259 毫克。頂部是太陽能電池,底部是驅動電路,它可以把太陽能電池板的電壓提高到 200 伏,這一工作電壓可使翅膀振動頻率達到 200 赫茲。現在的結構,可以避免太陽能電池板受到機翼氣流的影響,同時又能讓機器人的整體重心保持在機翼所在位置。該飛行器不需要任何控制,對于持續時間不到一秒的非常短的開環飛行,它可以足夠穩定。四翼 VS 兩翼
2013 年,Robert J. Wood 實驗室的一些人,包括當時的博士后 Sawyer Buckminster Fuller,在 Science 雜志上發表了一篇論文,介紹了一種基本上可控的蜜蜂機器人 RoboBee。第一代蜜蜂機器人設計得非常像蜜蜂,由兩個蜜蜂翅膀大小的機翼驅動。起初,研究人員認為,蜜蜂可以用兩只翅膀做很多事情,那么為什么機器人不能呢?
圖丨哈佛大學初代 RoboBee(來源:哈佛微型機器人實驗室)從那以后,又出現了好幾代蜜蜂型機器人,后來事實證明,兩機翼小飛行機器人之所以不能做蜜蜂所做的事情,原因有很多。至少就目前而言,偏航控制等問題就有些棘手,這也是為什么使用四個機翼而不是兩個的原因之一。具體來說,研究人員發現很難控制兩翼微型機器人的旋轉或偏航。相較而言,四個翅膀使得控制三個軸的方向非常簡單。通過控制不同速度和振幅的翅膀振動,飛行機器人可以實現偏航、俯仰和翻轉。當正常翅膀振動的頻率保持在 160 赫茲左右。在一個方向上減小機翼振幅,然后在另一個方向增大振幅,這樣可以保持頻率不變,但實現偏航。
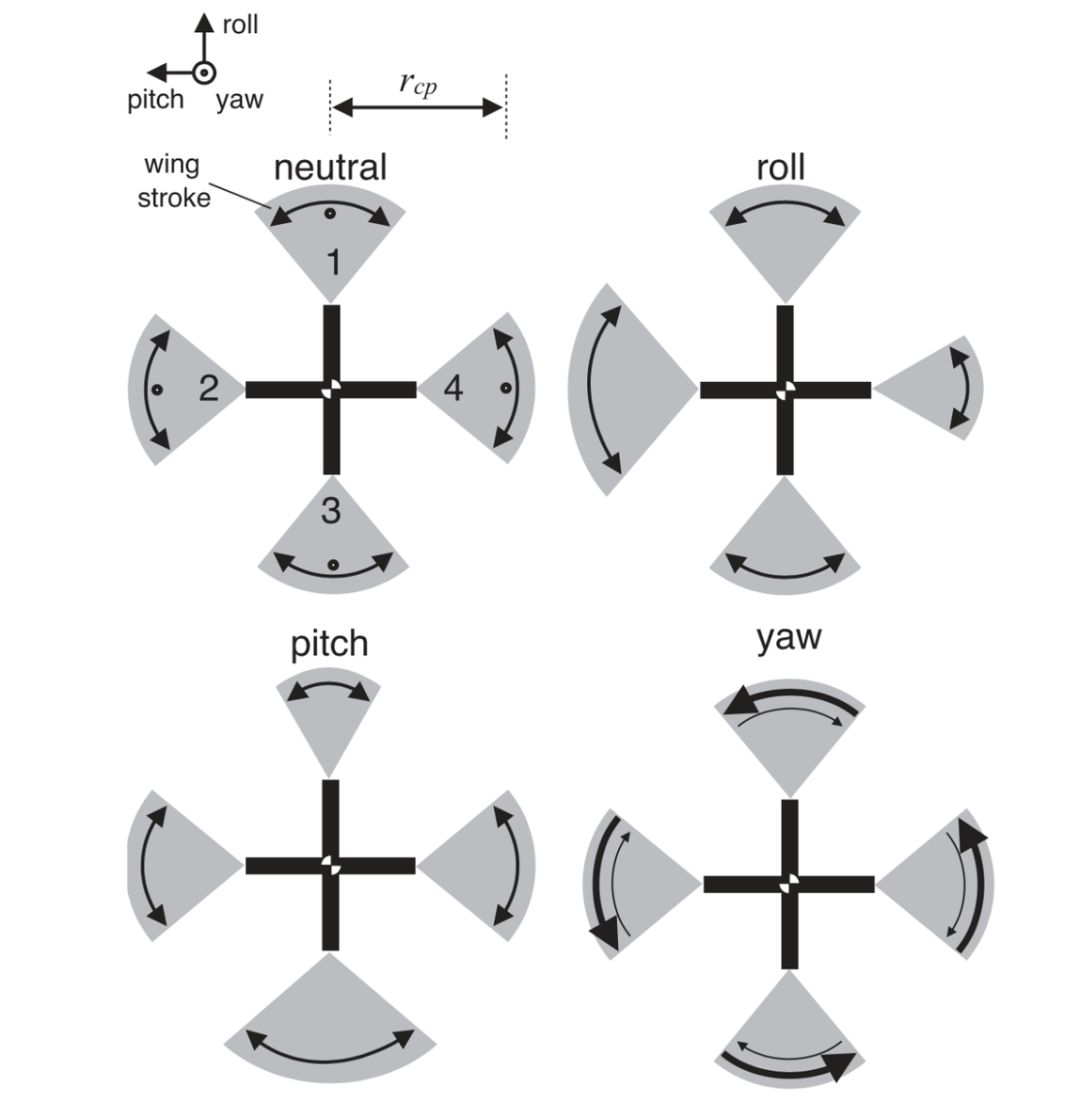
(來源:華盛頓大學)在四翼機器人的設計中,橫(x)軸和縱(y)軸轉向是通過改變相對機翼的振幅來實現的;驅動豎(z)軸(“轉向”)是通過改變相對于另一個方向的速度來實現的。壓力中心的近似位置用左上角的一個點表示;它到機器人質心的距離由 rcp 給出,箭頭表示四個翅膀每一個的近似振幅值。今年,在機器人領域頂級會議 ICRA 也有一些令人印象深刻的研究,它們表明用兩個翅膀控制偏航也是可能的。但是,這么小的微型機器人,尤其是飛行機器人,還有一個問題是電池能量儲存。飛行器需要大量的動力起飛,并在空中飛行,這意味著需要一個相對大的電池提供較長時間的電力,這會讓飛行器更重。這就是四翼飛行機器人的另一個優勢了,額外的翅膀意味著有更大的力量,可攜帶更多的東西。而且,有了更大的舉升力,就有了攜帶控制單元的能力,也就有可能實現一只完全獨立的飛行機器人。當然,它看起來可能會有點怪異。太陽能驅動 VS 激光驅動
需要指出的是,這并不是我們所見過的第一個能自主飛行的有翼飛行機器人。去年在 ICRA,西雅圖華盛頓大學的一個小組展示了一個兩翼機器人,當激光對準它的光感電池時,它就能起飛。2018 年,在澳大利亞布里斯班舉行的IEEE機器人與自動化國際會議上,來自華盛頓大學的機器人專家展示了兩翼機器人 RoboFly,這是一個昆蟲大小的激光驅動撲翼機器人,它進行了第一次(非常短暫的)不受約束的飛行。
(來源:華盛頓大學)RoboFly 是基于哈佛大學微型機器人實驗室的微型機器人 RoboBee 而設計的,大小和大黃蜂差不多,重量只有 190 毫克(比牙簽重一些)。它由一束紅外激光提供動力,當激光射中飛行器頂部很小的光伏電池時,它就可以收集到讓飛行器升空所需的 250 毫瓦能量。當時,激光沒有跟蹤機器人,只要光伏電池離開光束,它就會失去動力,機器人就會停止飛行。研究人員設想,最終飛行器可以由安裝在天花板上的激光控制,無論它走到哪里,激光都可以跟蹤它,甚至可以安裝在移動的車輛(或其他機器人)上,無限期地為它提供動力。
(來源:華盛頓大學)哈佛研究人員表示,他們新 RoboBee 飛行機器人是“持續飛行”而不僅僅是“升空”,在某種程度上這是開放的解釋,畢竟飛行時間都很短暫。新四翼 RoboBee 使用太陽能電池的原因是,飛行機器人無法舉起為翅膀提供動力的電池,因此必須使用舷外動力。沒有人想用導線來給飛行器供電,那就意味著要選擇某種無線電源。華盛頓大學團隊使用了激光,哈佛大學的新 RoboBee 使用了太陽能。實際上,要讓新 RoboBee 飛起來,一個太陽還不夠,可能需要“三個太陽”的照射強度,研究人員用一些強光燈實現了飛行過程。這意味著四翼 RoboBee 還不能用于戶外操作。研究人員表示,他們正在進行的下一步工作是一個比四翼 RoboBee 大 25% 的版本,它應該會把所需“太陽”的數量減少到 1.5 個,這意味著它也許可以在金星之類的地方工作。在目前的版本中,四翼 RoboBee 確實為傳感器之類的東西留下了一些重量預算,但聽起來,研究人員主要關注的是將電力需求降低到正常光照以下。在四翼 RoboBee 真正實現自主飛行之前,還需要進行一些設計優化和額外的集成工作。目前,自主飛行機器人正是朝著這個目標前進
-
機器人
+關注
關注
213文章
29748瀏覽量
212938 -
飛行器
+關注
關注
13文章
741瀏覽量
46386
原文標題:擺脫電線,太陽能驅動微機器人無束縛飛行
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
廣汽首款復合翼飛行汽車完成首飛
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
Vicor高密度電源模塊助力輕型飛行器設計
小型飛行器專用 AS-DR01模擬信號AI識別跟蹤模塊

無刷電機電調的基本原理

激光毀傷系統:低空飛行器的 “隱形獵手”
飛行汽車興起,連接器/線纜將面臨哪些挑戰?
MATLAB在低空飛行器中的應用

PCB板短時間內重復開關機,導致ADS8328初始化失敗怎么解決?
欣旺達:已具備低空飛行器電池研發生產能力
DDC264短時間內超出電壓范圍,是否還能正常測量?
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧





 工商網監
工商網監
評論