本研究提出了ExTraCT框架,利用自然語言進行軌跡校正。該框架結合了大型語言模型(LLMs)用于自....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-19 10:45
?767次閱讀

考慮到3D點云的稀疏性質,iDet3D設計了負點擊模擬 (NCS),通過減少誤報預測來提高準確性。還....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-16 16:08
?809次閱讀

另外,之前被網友調侃是“和諧號”車頭的理想MEGA也將于3月1日正式發布,比原定發布時間推遲了2個多....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-14 10:00
?1635次閱讀

BEV感知的主要工作。在輸入模態下," L "為LiDAR," SC "為單相機," MC "為多相....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-14 09:53
?1835次閱讀

BEV是Bird's Eye View 的縮寫,意為鳥瞰視圖。在自動駕駛領域,BEV 是指....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-13 09:41
?3812次閱讀

TUM數據集上相機跟蹤結果,評價指標是ATE RMSE [ m ] (↓),表示相關文獻未提及這個數....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-12 11:24
?626次閱讀

圖像匹配是各種視覺應用中基本且關鍵的任務,如同時定位與地圖構建( Simultaneous Loca....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-06 10:24
?1045次閱讀

本研究提出了一種自監督的多攝相機3D占據預測方法,名為OccNeRF。該方法旨在解決無界場景的建模問....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-02 14:53
?758次閱讀
本文提出了一種全新的學習型PatchMatch MVS框架,DS-PMNet,并嵌入了DeformS....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 01-02 09:25
?1206次閱讀

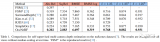
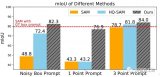
SAM、HQ-SAM、Stable-SAM在提供次優提示時的性能比較,Stable-SAM明顯優于其....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-29 14:35
?1045次閱讀
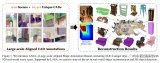
DisCo方法:提出了一種基于擴散的跨模態形狀重建方法。該方法利用三平面擴散模型,結合部分點云和多視....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-26 16:44
?813次閱讀
Gaussian-SLAM提出了用于seeding和優化Gaussian splats的新策略,以將....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-26 16:38
?1759次閱讀

該標定過程僅需10分鐘,能夠自動完成所有校準步驟,無需人工干預。通過該標定解決方案,相機模組能夠實現....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-19 15:14
?2428次閱讀
今天筆者將為大家分享NVIDIA的最新開源方案FoundationPose,是一個用于 6D 姿態估....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-19 09:58
?1647次閱讀

這個速度計框架以事件數據和IMU測量作為輸入。圖中所示分別為:(a) 無人機在狹窄走廊中進行攻擊行為....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-18 15:43
?720次閱讀

可以看一下單目深度估計效果,這個深度圖的分辨率是真的高,物體邊界分割的非常干凈!這里也推薦工坊推出的....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-17 10:01
?1190次閱讀

現有的3D物體檢測方法通常需要使用完全注釋的數據進行訓練,而使用預訓練的語義特征可以帶來一些優勢。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-14 10:00
?764次閱讀

MasQCLIP在開放詞匯實例分割、語義分割和全景分割三項任務上均實現了SOTA,漲點非常明顯。這里....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-12 11:23
?1272次閱讀

我們知道擴散模型生成圖像是通過反轉采樣來進行的,重點是識別噪聲。LEDITS++從DDPM反演中提取....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-10 10:09
?1210次閱讀

2021 年,Facebook 將「元宇宙(metaverse)」作為公司主營業務,并將公司名稱更改....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-10 10:02
?1207次閱讀

利用深度學習網絡模型DYnet++從單個復合圖案中獲取相位信息。為了訓練深度學習模型,作者使用了一個....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-04 15:29
?1023次閱讀
多視圖立體幾何(Multi-View Stereo,MVS)是計算機視覺中重要的研究領域,也是邁入三....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-04 10:08
?1247次閱讀

服務機器人、巡檢機器人、自動駕駛車輛等SLAM應用,需要進行長時間的定位和導航,但是可能會遇到很多光....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 12-04 10:01
?1340次閱讀

提出了一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統,該系統由完整的前端和后....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-29 10:35
?950次閱讀

最后,為了進一步提高視覺質量,我們提出了一種結構引導細化器來組合預測條件,以更詳細地生成更高分辨率。....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-27 16:03
?1106次閱讀

在一對圖像中尋找匹配的像素是具有各種應用的基本計算機視覺任務。由于光流估計和局部特征匹配等不同任務的....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-27 11:32
?933次閱讀

分配樣本數量:根據場景的不同區域,分配不同數量的樣本來表示地面真實外觀。對于復雜的模糊表面,需要更多....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-25 11:49
?1167次閱讀

本文在ZJU-MoCap和H36M上進行了泛化性實驗,結果如下圖所示。主要分為四個setting: ....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-23 11:25
?738次閱讀

本文提出了一種在線激光雷達語義分割框架MemorySeg,它利用三維潛在記憶來改進當前幀的預測。傳統....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-21 10:48
?904次閱讀

在自動駕駛中,感知、表示和重建動態場景對于代理程序理解并與其環境進行交互至關重要。
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 11-21 10:23
?3889次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

