編寫能夠被綜合工具識別的狀態機,首先需要理解狀態機的基本概念和分類。狀態機(FSM)是表示有限個狀態....
AIS網絡包括岸基AIS、船載AIS、星載AIS,根據AIS的不通應用,可將AIS分為移動站和固定站....

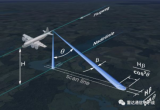
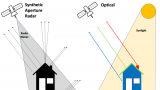
家知道合成孔徑雷達(SAR)是一種利用雷達與目標的相對運動把尺寸較小的真實天線孔徑用數據處理的方法合....

Multiboot是一種在AMD Xilinx 7系列FPGA上實現雙鏡像(或多鏡像)切換的方案。它....

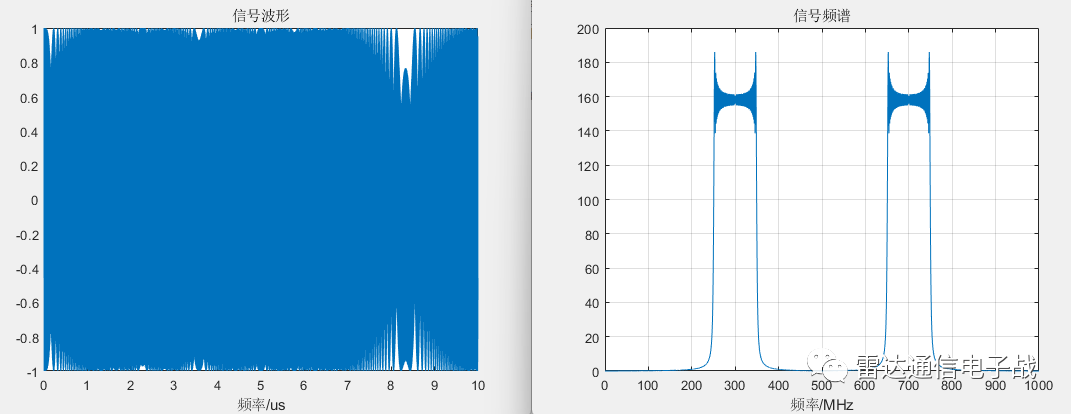
相位編碼信號的相位調制函數是離散的有限狀態,屬于“離散型“編碼脈沖壓縮信號。
在相位編....

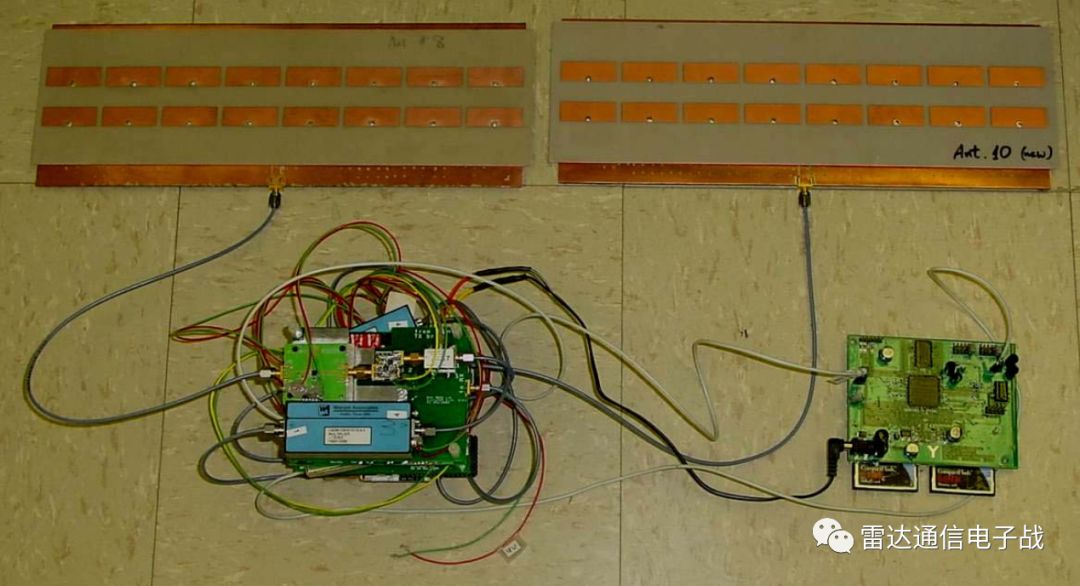
非通信電子支持系統,由最新的數字接收機技術組成,以提供高效的電子戰系統,采用了寬帶數字接收機(0.5....

2024年1月18日,中星聯華科技(Sinolink Technologies)開啟“精益求精,源為....

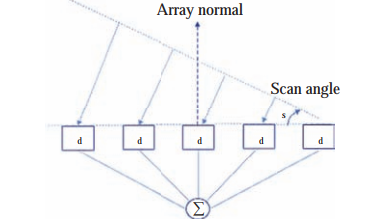
對于窄帶電子掃描陣列的實現,中心頻率可用于計算整個陣面的相位變化。然而,對于寬帶,使用信號帶寬內的實....
傳統傅里葉變換的分析方法大家已經非常熟悉了,特別是快速傅里葉變換(FFT)的高效實現給數字信號處理技....
Vitis2023.2之前就安裝過了,vivado 2023.2相比于2023.1區別不明顯,但嵌入....

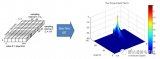
合成孔徑雷達天線往往僅用單個輻射單元,沿一直線依次在若干個位置平移,且在每一個位置發射一個脈沖信號,....
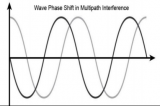
多徑效應是一種現象,某個輻射源的波經過兩條或多條路徑傳播到接收機,如果波保持相干,波的兩個或多個分量....
之前給大家介紹過楊百翰大學地球微波遙感實驗室(MERS)開發的microSAR,一種小型低成本LFM....
多輸入多輸出(Multiple Input Multiple Output,MIMO)雷達把無線通信....
小型無人機系統(sUAS)在政府、商業和私人使用中變得越來越普遍和廉價。有幾種反sUAS產品采用電磁....

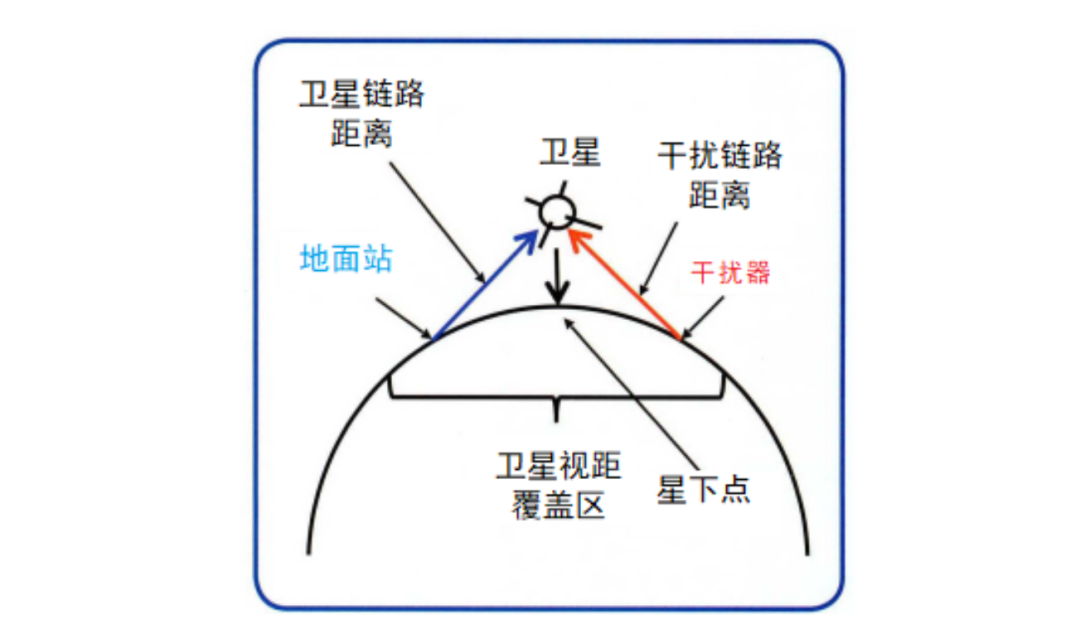
衛星離地球很遠,其視距范圍能覆蓋地球表面很大一部分區域,因此,它們也非常容易受到較強的敵方信號的影響....
相控陣雷達的出現最初是為了防御導彈,通常工作在超高頻波段。在1960年至1980年間建造的相控陣雷達....
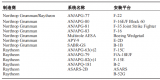
新的APG-85雷達系統將提供更高的可靠性和更低的燃油消耗,同時也能增加10%的功率,有助于提高飛機....
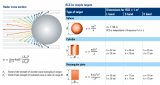
諧振區或Mie區。在此區域,波長與目標尺寸相當。目標雷達散射截面積隨著頻率變化而變化,變化范圍可達1....
首先,Ollie Ballinger使用的是公開可獲得的數據,這些數據是通過衛星捕獲的,他使用這些數....
常規的距離多普勒處理采集相干處理時間(CPI)內快時間/慢時間數據,并對所有距離單元的做慢時間維的離....
雷達是一種探測系統,它使用無線電波來確定目標的距離、角度或速度,它可以用來探測飛機、船舶、航天飛行器....
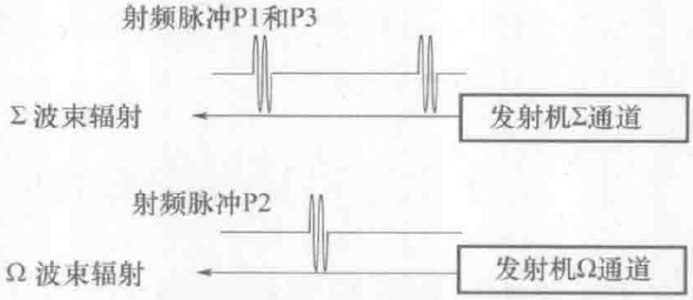
IFF系統是指敵我識別系統,在軍用上第一種較為實用的IFF系統為Mark X系統,但它最大的缺陷在于....
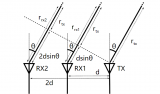
一部帶有一個發射機和一個接收機的雷達可以根據發射電磁波的往返時間來測量目標的距離,但不能測量目標的角....
在我們仿真雷達信號處理流程時,需要先仿真雷達的回波信號,同時為了更符合實際情況,我們還需要給雷達回波....
位操作符是對二進制位進行操作的運算符。以下是一些常用的位操作符
使用“~”運算符對單bit信號進行取反(也稱為位翻轉或反向)。
雷達誘餌的目的是讓對方傳感器認為它看到的是真實的物體,然后將行動集中在誘餌上。這是一種防御策略,通常....

1dB壓縮點是衡量放大器非線性程度的一個指標,是指當輸入功率增加時,輸出功率的線性增益開始壓縮的點,....





 工商網監
工商網監