
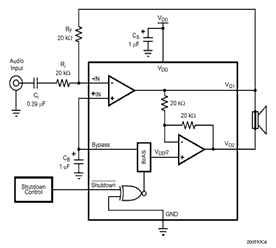
如何解決電壓測(cè)試遇到的問題
在IC的測(cè)試中,電壓的測(cè)試是所有測(cè)試參數(shù)中最為常見的一種參數(shù),尤其是模擬芯片的測(cè)試,電壓測(cè)試更顯常見....

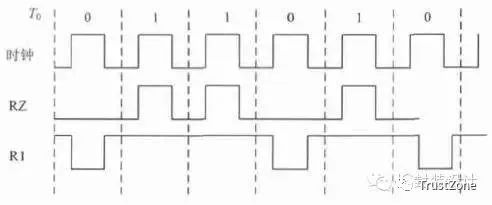
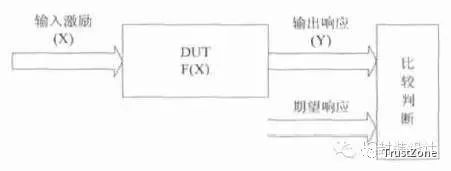
ic測(cè)試是什么意思
IC測(cè)試原理 IC 測(cè)試是指依據(jù)被測(cè)器件(DUT)特點(diǎn)和功能,給DUT提供測(cè)試激勵(lì)(X),通過測(cè)量D....
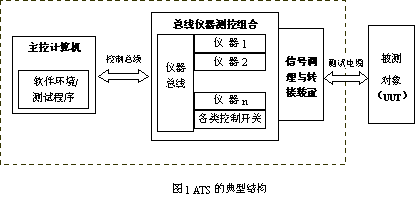
通用測(cè)試系統(tǒng)硬件和軟件架構(gòu)介紹
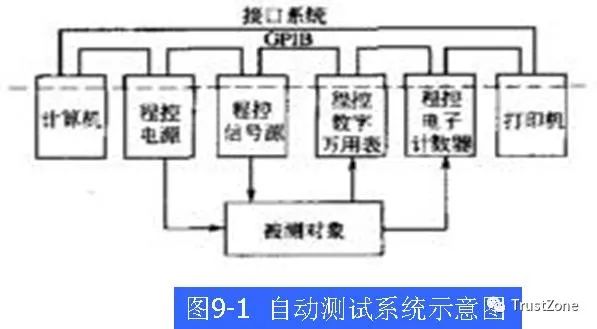
通用測(cè)試系統(tǒng)架構(gòu) 通用化自動(dòng)測(cè)試系統(tǒng)(ATS)主要由圖1所示的三個(gè)部分組成: ?主控計(jì)算機(jī)、 其中“....
ATE/ATS內(nèi)部結(jié)構(gòu)簡(jiǎn)介
ATE/ATS:自動(dòng)測(cè)試設(shè)備/自動(dòng)測(cè)試系統(tǒng),也稱測(cè)試機(jī)是測(cè)試工程師在IC測(cè)試中必須使用的工具,本文主....
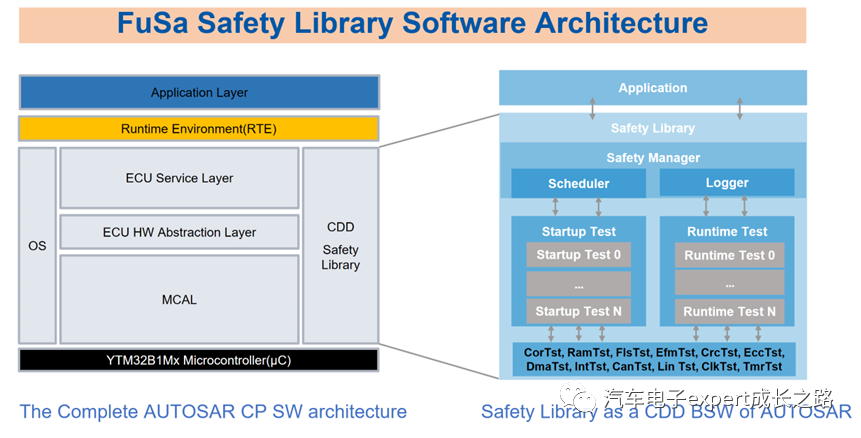
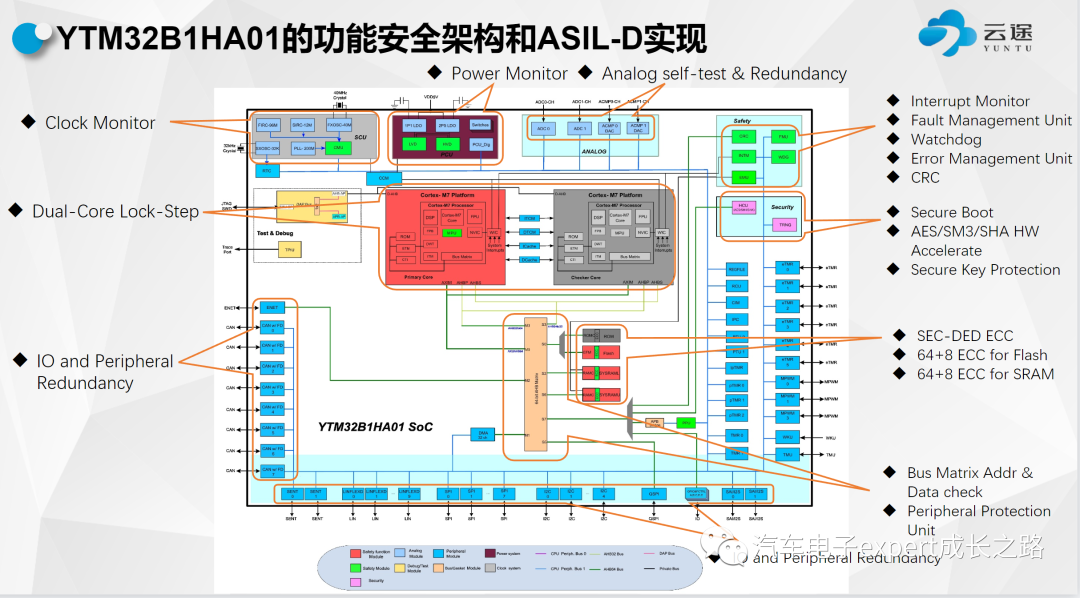
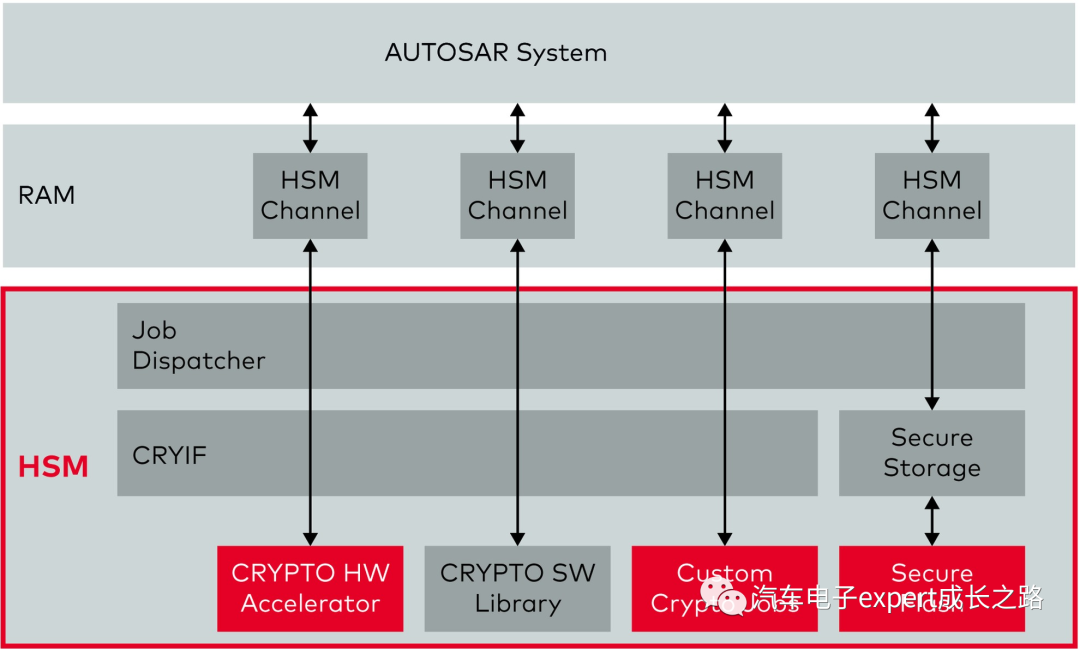
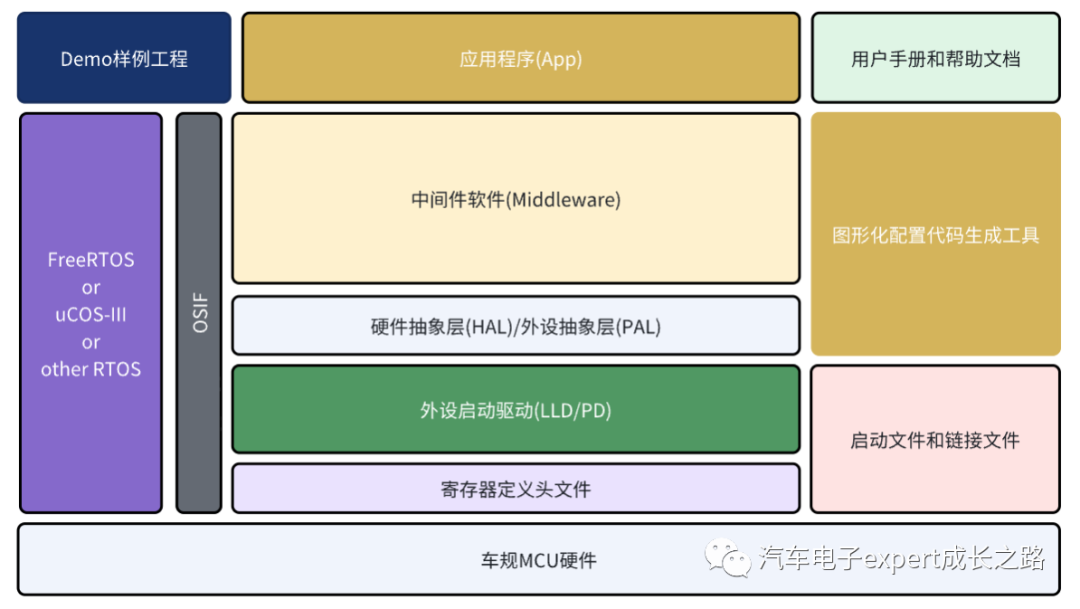
車規(guī)MCU功能安全外設(shè)驅(qū)動(dòng)
功能安全外設(shè)驅(qū)動(dòng)(SPD) 車規(guī)MCU的功能安全外設(shè)驅(qū)動(dòng)(SPD)是為了滿足汽車電子系統(tǒng)的功能安全要....
車規(guī)MCU的啟動(dòng)加載程序是什么
啟動(dòng)加載程序(bootloader) 車規(guī)MCU的啟動(dòng)加載程序(bootloader)是一種用于在汽....
汽車領(lǐng)域RTOS有哪些
在汽車領(lǐng)域,常用的RTOS除了以上介紹的AUTOSAR/OSEK OS和FreeRTOS之外,包括但....
AUTOSAR OS操作系統(tǒng)功能特性
AUTOSAR OS AUTOSAR OS(AUTomotive Open System ARchi....
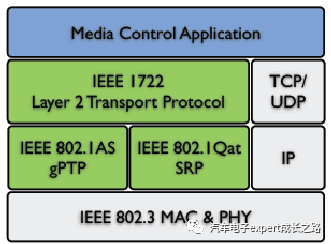
AUTOSAR軟件AVB協(xié)議棧介紹
以太網(wǎng)音視頻橋(AVB)協(xié)議棧 汽車以太網(wǎng)音視頻橋(AVB)協(xié)議棧是一種用于實(shí)現(xiàn)車載音視頻傳輸?shù)膮f(xié)議....
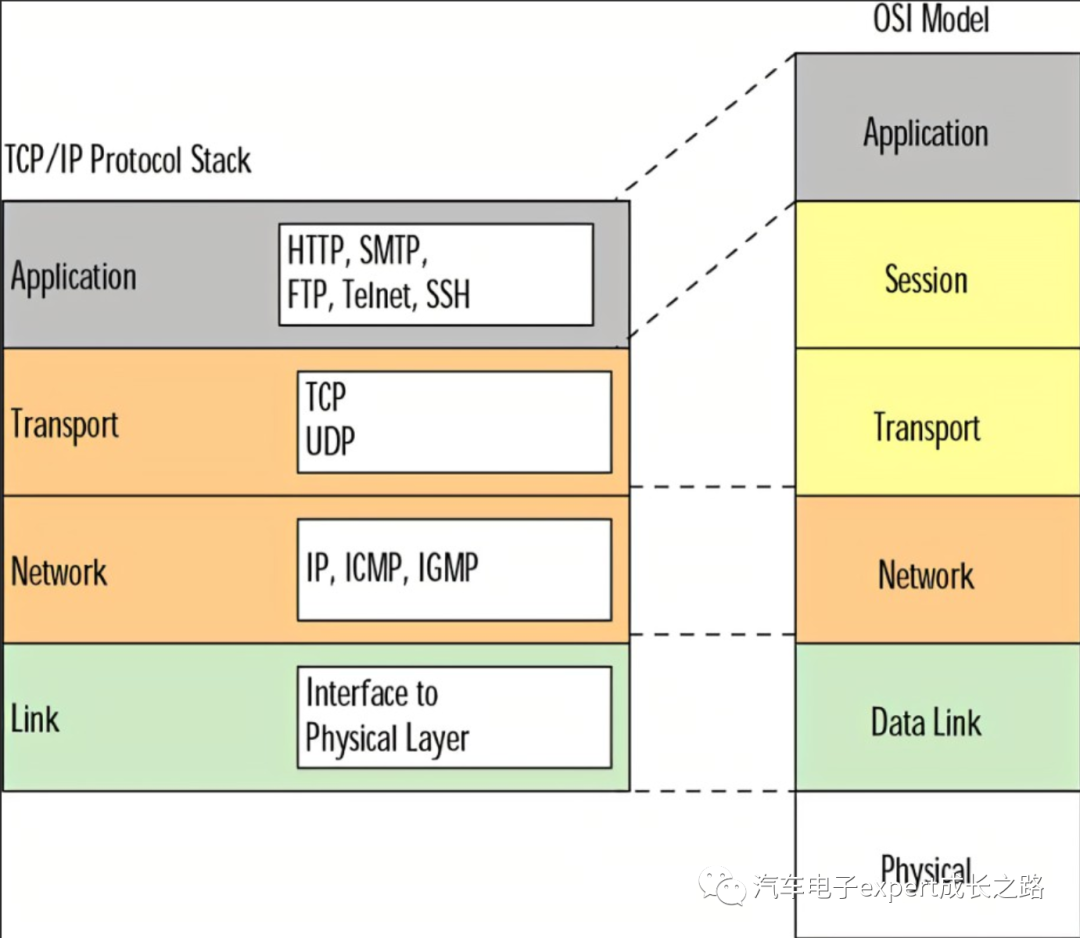
汽車UDS協(xié)議棧與XCP協(xié)議棧
UDS協(xié)議棧 汽車UDS協(xié)議棧是一種用于汽車電子控制單元(ECU)之間進(jìn)行診斷和通信的標(biāo)準(zhǔn)協(xié)議。UD....
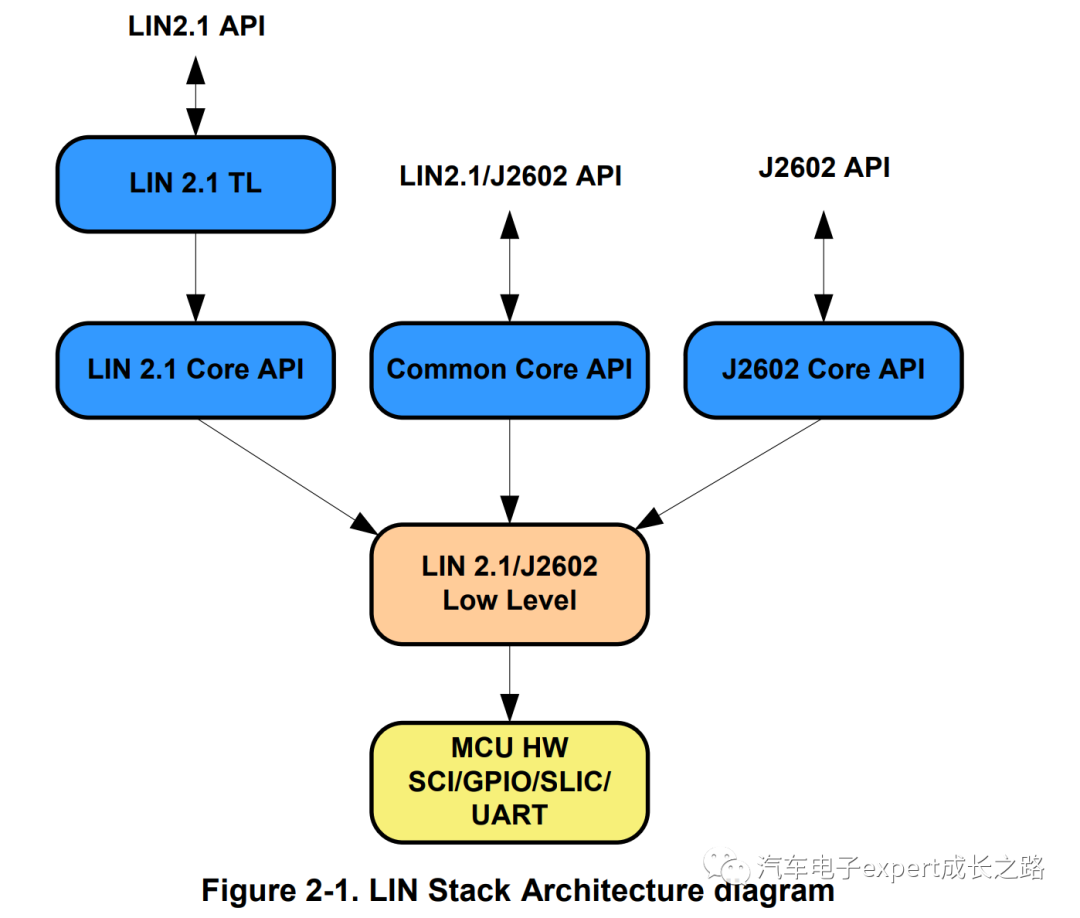
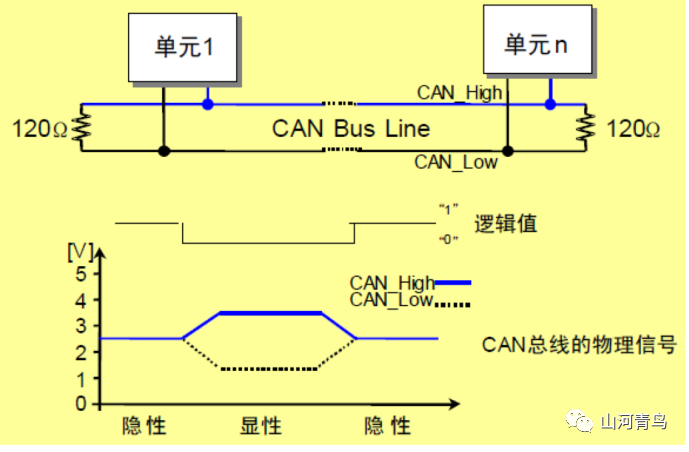
CAN協(xié)議棧與LIN協(xié)議棧介紹
CAN協(xié)議棧 汽車CAN協(xié)議棧是一種軟件組件,用于實(shí)現(xiàn)汽車電子系統(tǒng)中的CAN總線通信功能。它包含了一....
AUTOSAR軟件開發(fā)流程簡(jiǎn)介
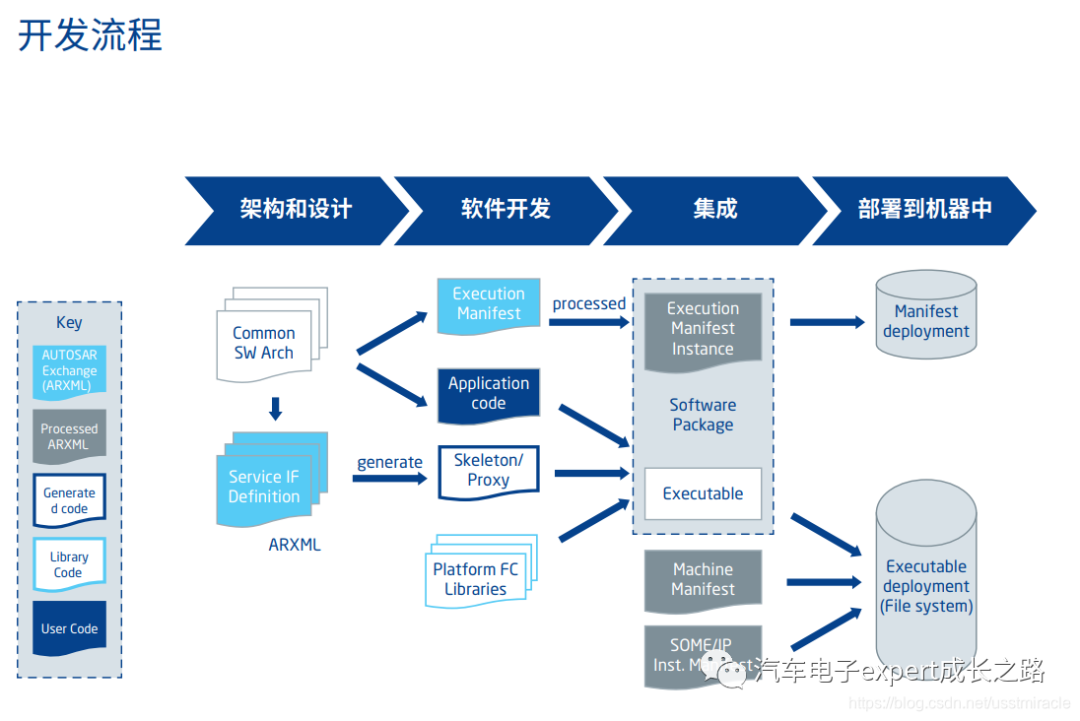
AUTOSAR軟件開發(fā)流程簡(jiǎn)介 AUTOSAR軟件開發(fā)流程是指在AUTOSAR架構(gòu)下進(jìn)行軟件開發(fā)的一....
AUTOSAR CP運(yùn)行時(shí)環(huán)境與應(yīng)用軟件
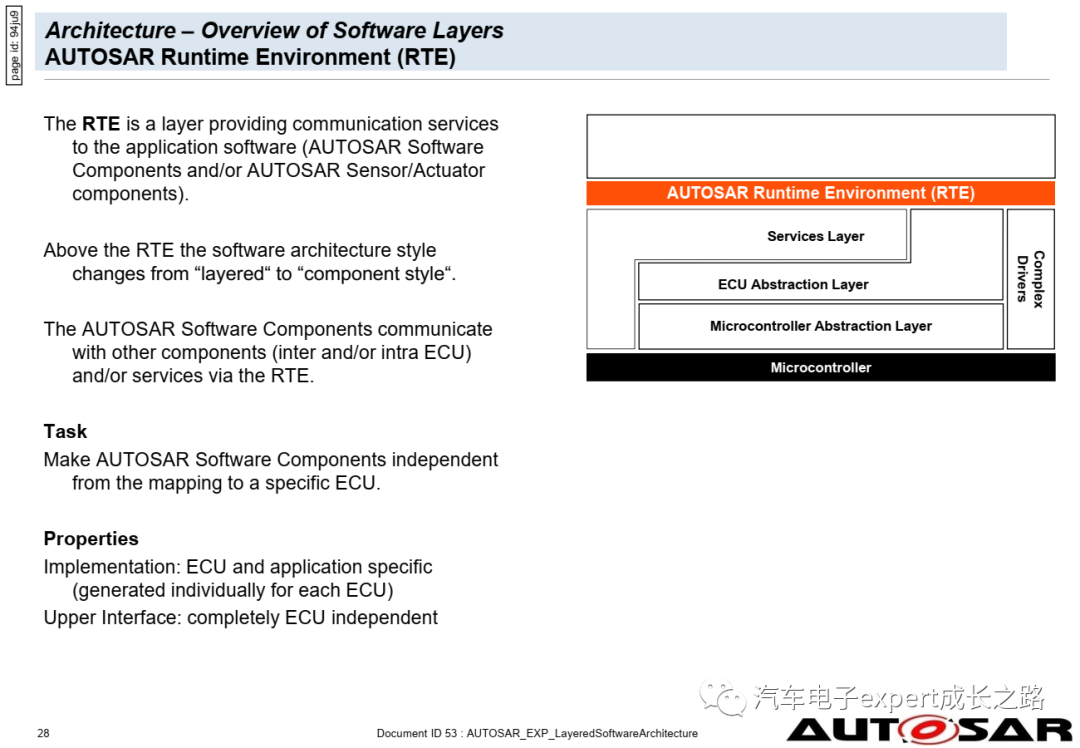
運(yùn)行時(shí)環(huán)境(RTE) AUTOSAR CP運(yùn)行時(shí)環(huán)境(RTE)是AUTOSAR架構(gòu)中的核心組件,它實(shí)....
AUTOSAR CP的復(fù)雜驅(qū)動(dòng)是什么
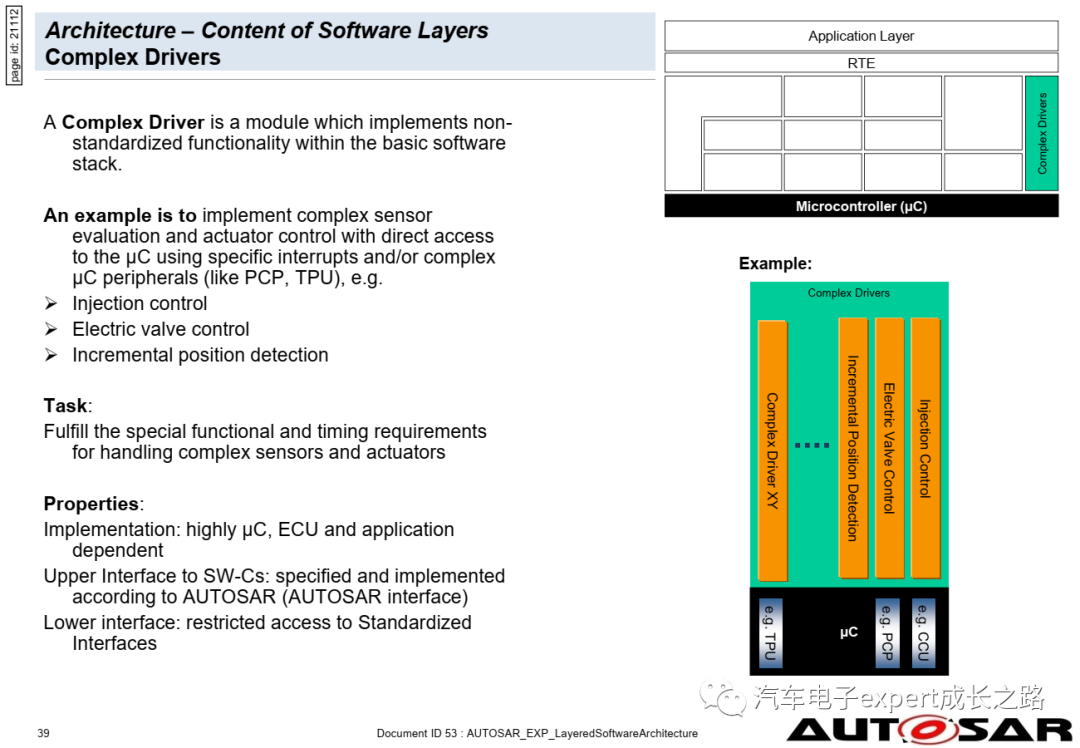
復(fù)雜驅(qū)動(dòng)(CDD) AUTOSAR CP的復(fù)雜驅(qū)動(dòng)(CDD)是為了實(shí)現(xiàn)復(fù)雜的傳感器評(píng)估和執(zhí)行器控制而....
AUTOSAR架構(gòu)MCAL、服務(wù)層、ECU抽象層介紹
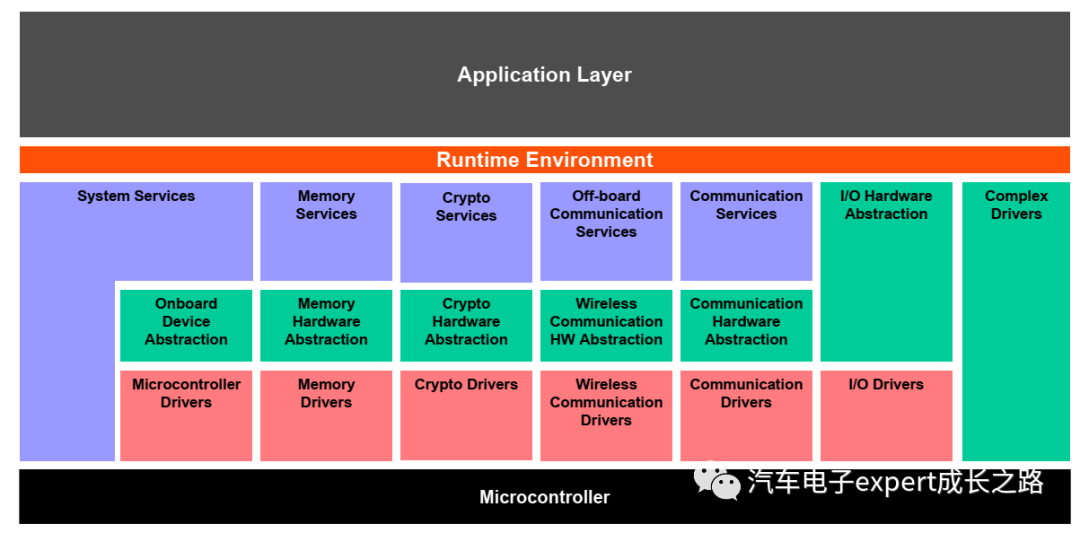
1 微控制器抽象層(MCAL) AUTOSAR CP的微控制器抽象層(MCAL)是AUTOSAR軟件....
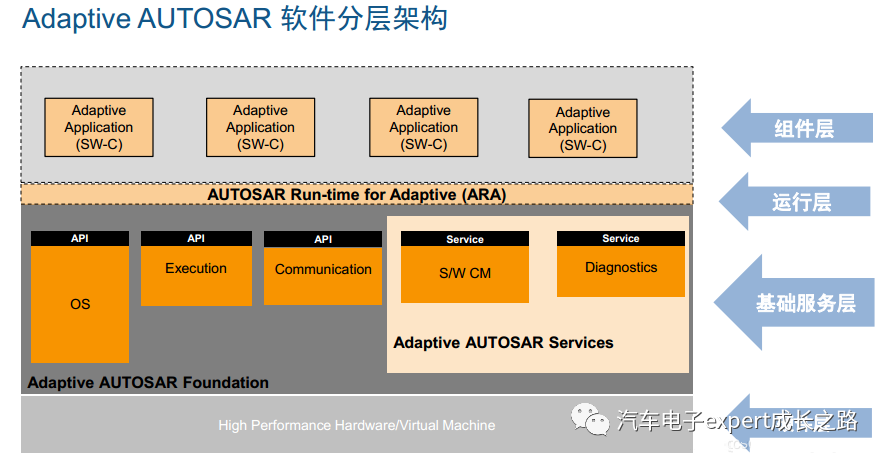
AUTOSAR經(jīng)典平臺(tái)介紹
經(jīng)典平臺(tái)(AUTOSAR CP) AUTOSAR經(jīng)典平臺(tái)(AUTOSAR CP)是AUTOSAR軟件....
嵌入式軟件中兩種超時(shí)程序設(shè)計(jì)方案
1、背景 在嵌入式軟件程序設(shè)計(jì)過程中中,經(jīng)常會(huì)遇到超時(shí)(或定時(shí))的處理情況,基本處理思想是在時(shí)間到的....

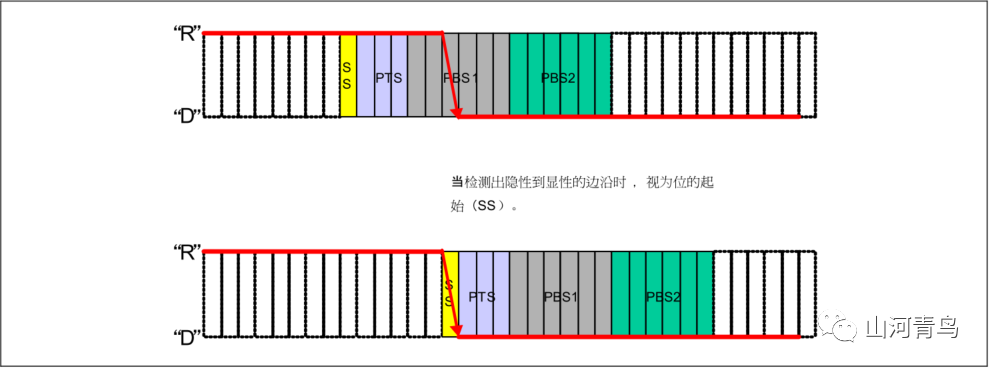
CAN總線調(diào)整同步的規(guī)則是什么
硬件同步 接收單元在總線空閑狀態(tài)檢測(cè)出幀起始時(shí)進(jìn)行的同步調(diào)整,在檢測(cè)出邊沿的地方不考慮SJW的值而認(rèn)....
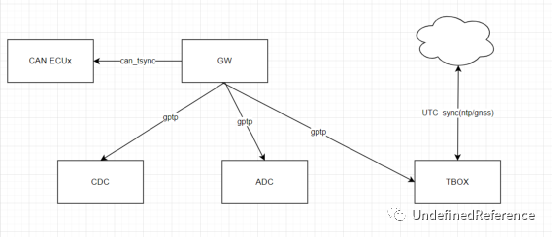
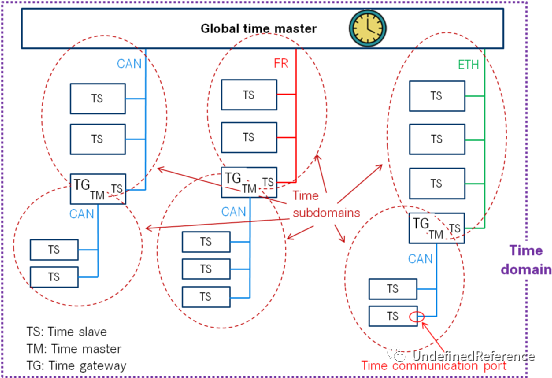
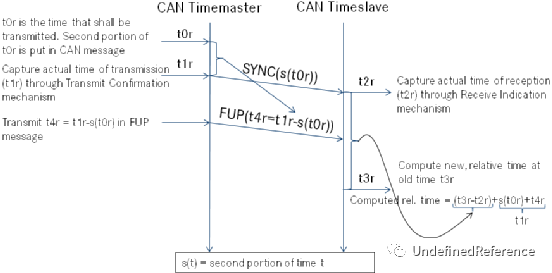
車載時(shí)鐘同步can_tsync實(shí)現(xiàn)原理
CAN時(shí)鐘同步來源,AUTOSAR cp的規(guī)范,AUTOSAR定義的基于CAN總線時(shí)間同步的CanT....
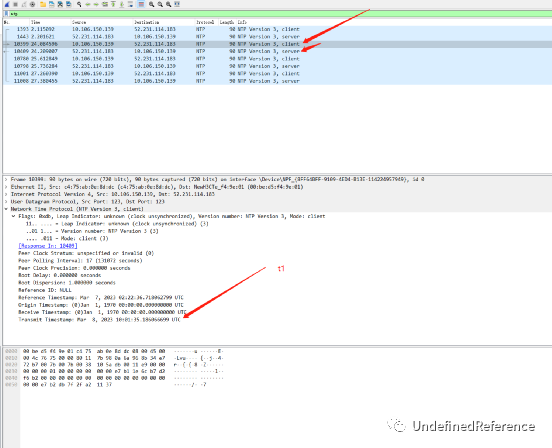
ntp的實(shí)現(xiàn)原理是什么
ntp實(shí)現(xiàn)原理 我們看一下為啥說ntp從實(shí)現(xiàn)時(shí)間同步的角度來說是很簡(jiǎn)單的。在pc上,以windows....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)