基于LIN總線汽車前燈運動控制系統的設計
基于LIN總線汽車前燈運動控制系統的設計
引言
隨著社會的發展,汽車越來越普及,汽車應用已變得日益復雜,而且越來越多地采用電子驅動,因此,將更多創新技術及專用技術應用在這個領域也就不足為奇了。隨著汽車擁有量的增加,發生交通事故的概率也隨之增加,特別是在夜間行車,兩車相匯,汽車前燈的控制就是一個重要的問題,目前汽車常包含有帶動態位置控制的前燈,特別是對高強度放電(HID)氙氣燈來說,動態位置控制功能非常關鍵。不過,前燈定位系統對電子組件提出了非常惡劣的環境要求。如何降低前燈運動控制設計的復雜度,節省時間、降低成本成為汽車電子研究的重要課題,本文針對汽車前燈控制的要求,介紹一種價格低,功能較齊,基于LIN總線汽車前燈運動控制系統的實現方法,對不同的步進驅動器/控制器組合,以實現汽車前燈運動控制系統最優化的系統設計方案。
系統硬件電路設計
LIN標準定義了一種車用分布式電子系統使用的低成本串行通訊系統。LIN是對現有車用多網絡組合的補充,這些組合包括采用控制器局域網絡(CAN)協議。LIN標準可以實現具有成本效益的車內開關、智能傳感器和制動器應用的通訊網絡。通訊協議是基于SCI (UART)數據格式,一種單主/多從的概念以及一個單線(外加地)12V總線。
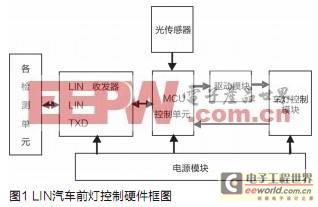
LIN從節點對總節點發出的控制信號進行處理,并對車燈驅動電路狀態進行測量。當從節點接收到報文信息后,對車燈發出相應的控制信號,并分析各燈的狀態,若發生故障,則生成一個數據信息發送到總節點。LIN從節點在檢測到總節點發送的信號后,先通過報文幀進行識別,看其是否屬于自己的報文信息。若屬于則首先判斷報文是不是查詢信息,如果是,則返回一個響應信息,如果是控制信息,則對相應的車燈進行控制,并對該車燈驅動電路上的測量點電位進行測量和進行處理。看其是否發生故障。若發生故障,則通過 LIN總線發送信息給總節點。并根據傳感器檢測到前方來車的燈光信號,實時的作出判斷,調整燈光的亮度和變化。圖l示出LIN汽車前燈控制硬件框圖。
MCU控制單元
設計中MCU選用飛思卡爾M68HC08系列的MC68HC908QL4作為LIN從節點的MCU,其電路框圖如圖2所示。16引腳TOP封裝的QL4芯片,VDD接+5V電源,SLCTX、SLCRX引腳分別接LIN的收發器(TJA1020)的TXD、RXD引腳。經過收發器LIN引腳進來+12V的LIN信號,經過收發器轉換成+5V的接受和發送信號,分別傳到QL4的接受和發送引腳。

從節點在初始化完成后,其它操作都在中斷里面完成。SLIC狀態向量寄存器(SLCSV)提供一個索引偏移量直接反映LIN模塊當前的工作狀態,它可以和用戶提供的跳轉表一起用來快速進入一個中斷服務子程序。LIN模塊的所有狀態在SLCSV里面都有相應的值對應,其值不僅反映LIN模塊狀態的索引偏移量,還反映中斷的優先級。
LIN收發器
本設計選用TJAl020作為LIN收發器,TJAl020是LIN主/從協議控制器和LIN物理總線之間的接口,主要用作于車輛副網絡。其波特率為2.4~20kbit/s。控制器在TXD引腳輸入的發送數據流通過LIN收發器轉換成LIN總線信號,并由收發器控制轉換速率和波形,減少極低的電磁發射(EME)。 LIN總線的輸出引腳通過一個內部終端電阻拉成高電平。收發器在LIN總線的輸入引腳檢測數據流并通過引腳RXD發送到微控制器。
電源模塊
在設計中,LIN模塊的電壓調節器均采用微功耗、低壓差穩壓器LTll2l-5。選用 LTl121-5通過對SHDN輸入低電平,能使其進入停止模式,這時靜態電流只有16mA,因此在總線上沒有活動時,就能達到減少功耗的目的;此外,該器件還具有防止輸入和輸出電源反向的功能,即使在輸出端不增加二極管的情況下,也能防止電流反向倒流。
車燈的驅動電路模塊
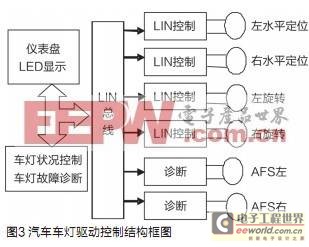
所設計的車燈驅動電路模塊采用分布式制動器控制,其控制框如圖3所示。該控制用于雙前燈的水平定位、旋轉及AFS。LIN微步進電機驅動器是一種帶集成有LIN控制/診斷的定位控制器的兩相驅動器,此控制器通過LIN接口接收高級定位指令,隨后驅動電機線圈到達理想位置。片上位置控制器可為不同電機類型、定位距離以及參數(如速度、加速度和減速度)而配置。如果系統檢測到停轉狀態,無傳感器停轉檢測就會阻止定位器失步并使電機停止。
控制器命令集的高抽象水平減少了MCU內微處理器的負載。根據前燈運動控制軸數量的不同而將調整應用是直接了當的方法。以模塊化方式擴展硬件和軟件設計,不會嚴重影響對主微控制器的要求。本系統只用一個MCU,并且要改變系統控制功能時增加或移走可選的電機很方便,花費也很少。目前的汽車常包含有帶動態位置控制的前燈。對于高強度放電(HID)氙氣燈,這種功能很關鍵。歐洲安全條例要求能動態控制主前燈光束的垂直位置,避免眩光。如果采用步進電機驅動器芯片,就可為這些應用只需幾個無源元件的類似應用設計出集成電子電機驅動器電路。
驅動器芯片通過一條LIN、I2C或SPI總線得到高水平定位控制和診斷命令指令,并將其轉換成驅動步進電機線圈的PWM信號。集成電機驅動器電路的優點包括能增加系統集成度,減小線束復雜度并降低EMI輻射,這樣能降低系統成本,加快終端產品面市時間并提高性能。傳統上來看,汽車鹵素前燈系統都裝有一個手動調節器,來對準前燈垂直方向。此裝置含有一模擬伺服系統,包含有一傳動、有刷直流電機的制動器驅動到與手動調節好的位置相對應的位置。伺服系統的反饋采用一個連接到制動器末端齒輪的電位計,電機驅動器為一功放。該系統相對來說價格低廉。
本設計采用的是線性步進電機前燈垂直定位方法。這類電機非常牢靠,并且工作在開環模式下不需要電位計反饋。線性運動通過一個螺栓/螺母組合實現。繞螺栓旋轉的步進電機有一通過定子線圈內的控制電流帶動磁轉子。 用于鹵素前燈水平定位系統、垂直定位、全適應前照明系統(AFS)等。
汽車前燈是對汽車夜間行駛安全性很關鍵的器件,控制其位置的電機必須也工作在自動方式,如果通訊總線發生故障,要將燈轉到安全位置。這一要求意味著,驅動器電路必須在不借助外傳感器情況下檢測停轉位置,通過其微步進模式,保證運動無聲而平滑。因此,對任何前燈位置控制架構,不論是集中式的還是分布式的,這些功能都是很基本的特征。
軟件設計
車燈控制系統主要完成兩個功能:一是實現LIN子節點對車燈的控制;二是實現對車燈故障的診斷。在控制中,通過分析總線電位和驅動電路中輸入、輸出、故障診斷引腳的電位來判斷系統是否發生故障。
要使LIN總線節點有效、實時地完成通信任務,軟件設計是關鍵。本設計采用結構化程序設計方案,具有較好的模塊性、可移植性和可修改性。
LIN信息的接收采用中斷方式,當MC68HC908QL4控制器檢測到符合該節點要求的信息幀后,首先判斷本地節點接收到的是什么信息,若為控制信息,則接收2個字節的數據信息;若為查詢信息,則將本地節點車燈的狀態以信息幀的形式發送回主節點,以反映節點情況。然后判斷,若為接收數據幀,則在 SLIC模塊中的數據寄存器(SLCDx)上讀取相應的信息。最后是根據數據信息中相關的位進行車燈控制,在發出控制信號后,相應采集車燈驅動芯片輸入、輸出和故障診斷引腳的電位,驅動車燈的運動狀況,接通水平方向車燈、接通左右方向車燈、AFS照明系統,通過對電位的分析判斷,向驅動電路發出控制信號,若不需要啟動車燈,則發送一個返回信息,返回到掃描車燈的位置。其程序設計車燈控制的流程如圖4所示。

在系統啟動并進行初始化以后, 儀表模塊開始啟動一個定時器, 實現周期性地對儀表盤的車燈按鈕狀態進行掃描, 然后將信息通過 L I N總線傳送到車燈控制模塊, 該信息包含了駕駛員對于車燈狀態的要求( 開通或關斷) 。車燈控制模塊同時對數字量診斷輸出的車燈信息和模擬電流傳感器診斷輸出的車燈進行檢測,對于出現故障的車燈信息,通過 L I N總線傳輸到儀表模塊上。傳輸信息包括車燈的名稱、車燈所在的位置和車燈狀態等 。車燈控制模塊結合儀表模塊判斷結果及儀表盤的掃描結果, 決定是否打開車燈或關閉車燈。儀表模塊通過 L I N總線接收/傳送車燈控制模塊的信息。
結語
基于LIN總線汽車前燈運動控制系統,能夠通過LIN總線對車燈進行線診斷,系統具有結構簡單、性能可靠、功能較齊、價格低廉等特點,對不同的步進驅動器/控制器組合,以實現汽車前燈運動控制系統最優化的系統設計方案。設計了MCU+LIN接口芯片的LIN節點硬件結構,實現了主機/從機任務的LIN網絡通訊。目前在國內如何采用總線技術提高整車性能,降低制造和維護成本,已成為汽車生產廠家關注的熱點。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關閱讀:
- [接口/總線/驅動] 基于LIN總線的汽車分級制網絡結構 2011-01-29
- [汽車電子] LIN總線在汽車車燈在線診斷系統中應用 2010-07-20
- [接口/總線/驅動] 基于ATA6628和ATA6630設計的LIN總線汽車電子收 2010-05-13
- [汽車電子] 基于有限狀態機在LIN總線開發中的應用 2010-04-20
- [汽車電子] 基于LIN總線的車用無刷直流電機LIN總線設計 2010-01-15
- [汽車電子] 基于LIN總線的車燈控制系統設計 2010-01-08
- [單片機類] 基于XC886單片機的門控系統LIN總線通信模塊設計 2009-12-04
- [汽車電子] 基于LIN總線的汽車HID前照燈自動調光系統 2009-09-17
( 發表人:發燒友 )