 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
當攝影鏡頭拍攝運動的物體時,如果運動軌跡已知,攝影鏡頭必須對焦距進行調節,從而調整目標的像點的位置,使得目標始終位于焦點上,達到實時拍攝的目標,傳統變焦大多是利用機械裝置完成的,比如凸輪機構,齒條機構;但是由于機械加工工藝復雜,其精度、平穩性和靈活性都難以滿足要求,為此本系統利用步 進電機帶動攝像機完成變焦,由于步進點機精確地按照步進角轉動,并且由DSP進行控制,從而滿足了以上機械裝置無法完成地性能要求。實驗結果表明,本系統 調焦曲線與理想曲線擬合度較好,拍攝已知運動軌跡的目標,達到了滿意效果。
1 調焦系統設計思想
在光學系統中,采用一組物鏡,調節軸向位移,物鏡光學系統物象關系是:
X′=f2 / X
其中 X′—— 像距(目標像平面到主焦平面的距離);
X —— 物距(目標距離);
f —— 光學系統焦距 f=常量,像距X′與物距X成反比關系。
利用已知的攝影調焦曲線確定步進電機轉動所需的步數和時間坐標關系,存入F240數據存儲器中,利用F240運算速度快、片載FLASH存儲器大 (16K字)的特點,準確控制步進電機控制器驅動步進電機運轉,通過機械裝置實現攝影鏡頭焦距按照規定的曲線變化,從而實現實時拍攝運動物體的功能。
2 硬件設計部分
2.1步進驅動器UP-4HB03M簡介
UP-4HB03M是北京聯太工貿有限公司生產的專用步進電機驅動器,4HBO3M適用于兩相六出頭混合式及四相混合式步進電機,PWM恒流控制方 式;可選擇半步(四相八拍)或者16細分兩種工作方式;驅動電流為0.3A連續可調,并且具有自動半流鎖定功能;脫機控制及其相位檢測功能;所有控制信號 與功率驅動部分光電隔離;散熱外殼與驅動器內部完全電絕緣。
2.2 TMS320F240簡介
TMS320F240(以下簡稱F240)由DSP內核和片內外設組成。由于DSP內核具有較快的計算和響應處理速度,可以應付高速應用的要 求,同時也為控制軟件的設計提供了更加有力的支持,使控制系統能夠完成更加復雜的功能、實現更好的控制效果。同時TMS320F240具有豐富的片內外 設,包括16路10位A/D轉換器、多個可編程的多路復用I/O引腳、硬件UART以及SPI總線等。特別是TMS320F240片內設置了一個事件管理 器(EPA),可以提供6路全比較PWM通道,能方便地實現各種PWM波形的發生。這里使用F240主要是考慮F240速度快以及有豐富的I/O引腳資 源;程序燒寫方便,利于更新曲線坐標以及修改程序;性價比較高等因素。
2.3 硬件設計
本系統的硬件接口電路如圖1所示,74ls14為反相器,接到DSP的I/O口以提高其驅動能力,CH1是一個八腳的插頭,用于外接步進機的各項繞 組。步進電機以及攝影鏡頭部分從略。工作過程如下:首先獲得攝影調焦曲線,利用MATLAB軟件,得出時間位移坐標,再換算成步進電機轉動所需的步數時間 坐標,以數組的行式保存下來。在F240的數據存儲器中開辟空間存儲步數時間數組,利用F240定時器完成計時,I/O口輸出相應寬度的脈沖信號,驅動步 進電機驅動器UP-4HB03M,其中CP為步進脈沖輸入端;FREE為脫機端,高電平有效,FREE=1時,電機處于釋放狀態;V/D為方向控制端,高 低電平分別控制電機正反轉。
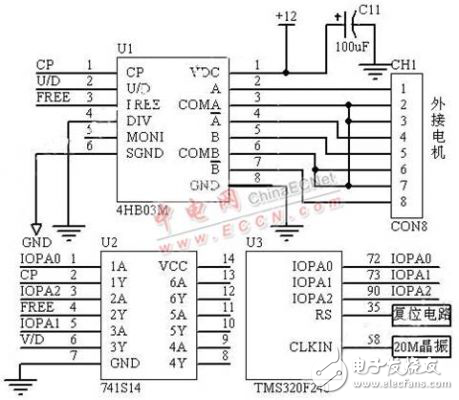
圖1 硬件接口電路圖
3 軟件設計:
由于電機的運行和轉動步數以及兩步之間間隔時間有關系,故采用計時器計時的方法來計算時間,F240初始化程序如下:
void Initcpu(void) //初始化F240程序
{ *WDCR=0x6f; // 禁止自帶的看門狗功能;
*CKCR1=0x69; // 外部輸入晶振為20MHZ,F240工作在20MHZ;
*CKCR0=0xc3; // 系統時鐘為10MHZ;
*SYSCR=0x4000; } // F240輸出頻率CLKOUT=IOPC1(I/O管腳);
F240初始化后,計時器的基本計時時間為0.1?s,考慮到F240定時器是16位計數器,這難以滿足計算長時間的需求,所以采用通過計算進入定時器中斷的次數來計算長時間的方法。例如設置定時器周期寄存器值為800即*T1PR=800,那么進一次定時器中斷時間為800*0.1= 80?s如果計時為1s的話,則只需進12500次中斷即可,以此類推;故定義的數組內容表示如下:
int table[ ]= { 25,800,255, //第1行
。 . 。 . 。 . } //第n行
1 調焦系統設計思想
在光學系統中,采用一組物鏡,調節軸向位移,物鏡光學系統物象關系是:
X′=f2 / X
其中 X′—— 像距(目標像平面到主焦平面的距離);
X —— 物距(目標距離);
f —— 光學系統焦距 f=常量,像距X′與物距X成反比關系。
利用已知的攝影調焦曲線確定步進電機轉動所需的步數和時間坐標關系,存入F240數據存儲器中,利用F240運算速度快、片載FLASH存儲器大 (16K字)的特點,準確控制步進電機控制器驅動步進電機運轉,通過機械裝置實現攝影鏡頭焦距按照規定的曲線變化,從而實現實時拍攝運動物體的功能。
2 硬件設計部分
2.1步進驅動器UP-4HB03M簡介
UP-4HB03M是北京聯太工貿有限公司生產的專用步進電機驅動器,4HBO3M適用于兩相六出頭混合式及四相混合式步進電機,PWM恒流控制方 式;可選擇半步(四相八拍)或者16細分兩種工作方式;驅動電流為0.3A連續可調,并且具有自動半流鎖定功能;脫機控制及其相位檢測功能;所有控制信號 與功率驅動部分光電隔離;散熱外殼與驅動器內部完全電絕緣。
2.2 TMS320F240簡介
TMS320F240(以下簡稱F240)由DSP內核和片內外設組成。由于DSP內核具有較快的計算和響應處理速度,可以應付高速應用的要 求,同時也為控制軟件的設計提供了更加有力的支持,使控制系統能夠完成更加復雜的功能、實現更好的控制效果。同時TMS320F240具有豐富的片內外 設,包括16路10位A/D轉換器、多個可編程的多路復用I/O引腳、硬件UART以及SPI總線等。特別是TMS320F240片內設置了一個事件管理 器(EPA),可以提供6路全比較PWM通道,能方便地實現各種PWM波形的發生。這里使用F240主要是考慮F240速度快以及有豐富的I/O引腳資 源;程序燒寫方便,利于更新曲線坐標以及修改程序;性價比較高等因素。
2.3 硬件設計
本系統的硬件接口電路如圖1所示,74ls14為反相器,接到DSP的I/O口以提高其驅動能力,CH1是一個八腳的插頭,用于外接步進機的各項繞 組。步進電機以及攝影鏡頭部分從略。工作過程如下:首先獲得攝影調焦曲線,利用MATLAB軟件,得出時間位移坐標,再換算成步進電機轉動所需的步數時間 坐標,以數組的行式保存下來。在F240的數據存儲器中開辟空間存儲步數時間數組,利用F240定時器完成計時,I/O口輸出相應寬度的脈沖信號,驅動步 進電機驅動器UP-4HB03M,其中CP為步進脈沖輸入端;FREE為脫機端,高電平有效,FREE=1時,電機處于釋放狀態;V/D為方向控制端,高 低電平分別控制電機正反轉。
圖1 硬件接口電路圖
3 軟件設計:
由于電機的運行和轉動步數以及兩步之間間隔時間有關系,故采用計時器計時的方法來計算時間,F240初始化程序如下:
void Initcpu(void) //初始化F240程序
{ *WDCR=0x6f; // 禁止自帶的看門狗功能;
*CKCR1=0x69; // 外部輸入晶振為20MHZ,F240工作在20MHZ;
*CKCR0=0xc3; // 系統時鐘為10MHZ;
*SYSCR=0x4000; } // F240輸出頻率CLKOUT=IOPC1(I/O管腳);
F240初始化后,計時器的基本計時時間為0.1?s,考慮到F240定時器是16位計數器,這難以滿足計算長時間的需求,所以采用通過計算進入定時器中斷的次數來計算長時間的方法。例如設置定時器周期寄存器值為800即*T1PR=800,那么進一次定時器中斷時間為800*0.1= 80?s如果計時為1s的話,則只需進12500次中斷即可,以此類推;故定義的數組內容表示如下:
int table[ ]= { 25,800,255, //第1行
。 . 。 . 。 . } //第n行
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- TMS320F240官方數據下載 4次下載
- 基于TMS320F240 DSP的開關磁阻電機控制系統 15次下載
- 如何使用DPS和TMS320F240實現永磁同步電機變頻調速系統的設計 21次下載
- TMS320F240 DSP求解旋轉變壓器角位置和速度的方法 18次下載
- 開關磁阻電機控制——基于TMS320F240的基本操作和實例 45次下載
- 基于TMS320F240的三相永磁同步電機速度場定向控制的實現 12次下載
- TMS320F240單片機 3次下載
- 基于TMS320F240的雙閉環調速系統 77次下載
- TMS320F240在掃描式攝影點陣控制系統中的應用
- 基于TMS320F240的串行通訊設計
- TMS320F240開發板的研制
- 基于TMS320F240 的攝影點陣系統設計
- 基于TMS320F240控制步進電機的調焦系統設計
- TMS320F240在高頻PWM調速器中的應用
- TMS320F240 pdf datasheet
- 基于TMS320DM642和EPM240芯片實現圖像采集與處理系統的設計 3672次閱讀
- 基于DSP芯片TMS320F240實現PWM整流器控制系統的應用設計 3034次閱讀
- 基于數字信號控制器TMS320F2812芯片實現嵌入式數字頻率計的設計 2361次閱讀
- 基于DSP和UP-4HB03M驅動器實現步進電機調焦系統的設計 1623次閱讀
- DSP的串行通信接口SCI與PC機的通訊設計 5743次閱讀
- TMS320F28335最小應用系統設計電路 1.7w次閱讀
- TMS320f28335控制AD7656的硬件電路設計 1.1w次閱讀
- TMS320F28027與L298N的懸掛運動控制系統設計 4063次閱讀
- 基于DSP的三相8極無刷直流電機控制設計 5129次閱讀
- 基于FPGA的步進電機控制系統的設計方案 5297次閱讀
- 三大電機控制方案之DSP篇(1):TMS320F28335 5.6w次閱讀
- 基于SVPWM算法的變頻調速系統設計方案 5144次閱讀
- 基于DSP的自適應濾波器的設計方案 8742次閱讀
- 基于DSP的加速度計溫度控制系統的硬件設計 1740次閱讀
- TMS320F2812實現諧波譜線顯示設計 1311次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1DC電源插座圖紙
- 0.67 MB | 2次下載 | 免費
- 2AN158 GD32VW553 Wi-Fi開發指南
- 1.51MB | 2次下載 | 免費
- 3AN148 GD32VW553射頻硬件開發指南
- 2.07MB | 1次下載 | 免費
- 4AN111-LTC3219用戶指南
- 84.32KB | 次下載 | 免費
- 5AN153-用于電源系統管理的Linduino
- 1.38MB | 次下載 | 免費
- 6AN-283: Σ-Δ型ADC和DAC[中文版]
- 677.86KB | 次下載 | 免費
- 7SM2018E 支持可控硅調光線性恒流控制芯片
- 402.24 KB | 次下載 | 免費
- 8AN-1308: 電流檢測放大器共模階躍響應
- 545.42KB | 次下載 | 免費
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 450次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 138次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 130次下載 | 免費
- 4使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 53314A函數發生器維修手冊
- 16.30 MB | 31次下載 | 免費
- 6美的電磁爐維修手冊大全
- 1.56 MB | 24次下載 | 5 積分
- 7如何正確測試電源的紋波
- 0.36 MB | 17次下載 | 免費
- 8感應筆電路圖
- 0.06 MB | 10次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論