 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
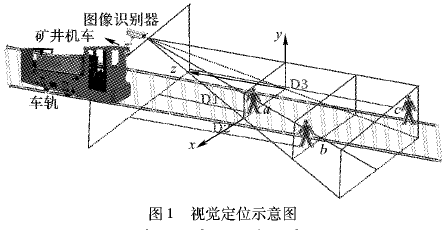
自主駕駛礦 井機車需要實時檢測和定位行駛前方的巷道行人,激光雷達等非視覺類方法成本高昂,而傳統基于特征提取視覺類方法無法解決并下光照差且光線不均勻的問題。提出一種基于深度學習的井下巷道行人視覺定位算法。首先給出基于深度學習網絡的系統整體結構;其次,搭建目標檢測多層卷積神經網絡(CNN),生成自主駕駛機車前方視野范圍內行人的二維坐標及邊界框的尺寸;再次,通過多項式擬合計算出圖像中行人到機車之間的第三維距離;最后通過真實祥本集實施模型訓練驗證與測試。實驗結果表明,所提算法的檢測準確率達94% ,速度達每秒25幀,測距誤差小于4%,實現了實時高效的巷道行人視覺定位。
近年來,隨著市場對駕駛安全和智能化需求的不斷提高,無人駕駛巨大的社會和經濟價值越發凸顯,[1]。無人駕駛系統在民用、科學研究、軍事、工業等方面獲得廣泛應用。其中在工業方面則針對具有繁重的運輸任務、有事故風險的并下工作環境來代替人工來完成采礦、運輸等任務。不同于一般的駕駛環境,工業軌道運輸環境受井下空間和運輸礦物的影響,容易導致事故的發生,且一旦發生事故極易造成人員傷亡或引發爆炸等嚴重后果。因此,為了從根本上減少機車運行事故的發生,杜絕人員傷亡現象的出現,有必要對無人礦井機車前方行人進行動態感知、識別分析處理,做到及時啟/停和提前預警。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 集成機器視覺與運動控制的高速工業自動化應用的詳細資料說明 22次下載
- 圖論算法及MATLAB程序代碼的詳細資料說明 0次下載
- 機器學習教程之線性模型的詳細資料說明 0次下載
- 機器學習的模型評估與選擇詳細資料說明 0次下載
- 運動控制系統的學習課件詳細資料說明 8次下載
- 深度神經網絡的快速學習算法NBP的詳細資料說明 9次下載
- 遺傳算法原理及其MATLAB實現的詳細資料說明 5次下載
- 如何深度解析C++拷貝構造函數詳細資料說明
- 使用Proteus進行一個仿真實例的詳細資料說明
- FPGA視頻教程之學習FPGA選擇verilog還是vhdl詳細資料說明 24次下載
- 如何使用優化圖的半監督學習進行行人檢測的詳細資料說明 5次下載
- 機器學習教程之機器學習10大經典算法的詳細資料講解 25次下載
- 機器學習算法中的FSS算法詳細資料合集免費下載 9次下載
- 機器學習算法中的ID3算法詳細資料合集免費下載 5次下載
- 人工智能深度學習目標檢測的詳細資料免費下載 44次下載
- 深度學習在工業機器視覺檢測中的應用 1135次閱讀
- 深度學習的基本原理與核心算法 2326次閱讀
- 深度學習在計算機視覺領域的應用 885次閱讀
- 目前主流的深度學習算法模型和應用案例 2087次閱讀
- 瑞薩電子深度學習算法在缺陷檢測領域的應用 915次閱讀
- 基于深度學習的圖像去模糊算法及應用 2745次閱讀
- 深度學習中多種優化算法 2617次閱讀
- 如何進行PLC控制程序的設計詳細資料PPT說明 6010次閱讀
- 深度學習和普通機器學習的區別 4470次閱讀
- 機器人3D視覺引導系統的詳細資料概述 8359次閱讀
- 什么是深度學習人工智能的深度學習詳細資料概述 6472次閱讀
- 基于深度學習的多目標跟蹤算法技術 1.3w次閱讀
- 拆解移動機器人視覺算法 5660次閱讀
- 你知道機器深度學習 那你知道全新的進化算法嗎 3269次閱讀
- PLC常用基本環節梯形圖和詳細文字說明詳細資料概述 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1490次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 92次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關電源原理及各功能電路詳解
- 0.38 MB | 10次下載 | 免費
- 6基于AT89C2051/4051單片機編程器的實驗
- 0.11 MB | 4次下載 | 免費
- 7藍牙設備在嵌入式領域的廣泛應用
- 0.63 MB | 3次下載 | 免費
- 89天練會電子電路識圖
- 5.91 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33562次下載 | 免費
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21539次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537791次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233045次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183277次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監
工商網監
評論