 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
情況
在現(xiàn)代農(nóng)業(yè)和林業(yè)方面,植物病理學(xué)研究對于作物改良非常重要。每年,巨大的作物因病原體的侵襲而受損。在大多數(shù)情況下,農(nóng)民和普通人由于嚴(yán)重的病原侵染而遭受巨大損失。對于作物改良,首要的關(guān)鍵點(diǎn)是病害識別。正確識別疾病后,我們將能夠治療疾病。大多數(shù)案例以實(shí)驗(yàn)室為導(dǎo)向的研究是耗時(shí)且非常消耗性的,但使用現(xiàn)代技術(shù)即時(shí)識別植物病害及其致病生物是最合適、成本有效且真實(shí)的。這種類型識別方法將幫助我們通過適當(dāng)?shù)目刂拼胧┳R別疾病。
根據(jù)維基百科,農(nóng)藥的影響包括農(nóng)藥對非目標(biāo)物種的影響。農(nóng)藥是用于殺死真菌或動(dòng)物害蟲的化學(xué)制劑。超過98%的噴灑殺蟲劑和 95% 的除草劑到達(dá)目標(biāo)物種以外的目的地,因?yàn)樗鼈儽粐姙⒒蛏⒉荚谡麄€(gè)農(nóng)田。徑流可以將殺蟲劑帶入水生環(huán)境,而風(fēng)可以將它們帶到其他田地、放牧區(qū)、人類住區(qū)和未開發(fā)地區(qū),可能影響其他物種。其他問題源于不良的生產(chǎn)、運(yùn)輸和儲存做法。隨著時(shí)間的推移,重復(fù)施用會增加害蟲的抵抗力,而它對其他物種的影響會促進(jìn)害蟲的死灰復(fù)燃。
每種殺蟲劑或殺蟲劑類別都有一組特定的環(huán)境問題。這種不良影響導(dǎo)致許多殺蟲劑被禁用,而法規(guī)限制和/或減少了其他殺蟲劑的使用。農(nóng)藥使用的全球傳播,包括使用在某些司法管轄區(qū)已被禁止的舊/過時(shí)農(nóng)藥,總體上有所增加。
因此,我們可以得出結(jié)論,盡管殺蟲劑和殺蟲劑非常有用,但現(xiàn)在正相反,即危害性正在迅速增加。
主意
所以重點(diǎn)出現(xiàn)了——“我們可以做些什么來控制農(nóng)藥的使用?”。
在這里,我們應(yīng)該記住一件事,我們需要建立一個(gè)可以降低甚至可能追蹤農(nóng)藥使用的系統(tǒng),因?yàn)槌鲇谝恍┟黠@的原因,我們無法將其降低以維持農(nóng)業(yè)工業(yè)。
理論
在我們的項(xiàng)目中,我們將使用稱為體溫調(diào)節(jié)的溫血哺乳動(dòng)物的特征和特征。這是一張顯示體溫調(diào)節(jié)存在并由紅外掃描儀相機(jī)掃描的圖像 -
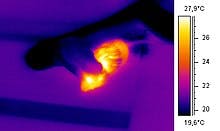
所以基本上我們將使用 balenaFin 使用 AMG8833 傳感器攝像頭進(jìn)行掃描,它會顯示那里是否存在害蟲。然后它會告訴我們在哪里準(zhǔn)確噴灑殺蟲劑或殺蟲劑,在哪里不應(yīng)該噴灑。
硬件
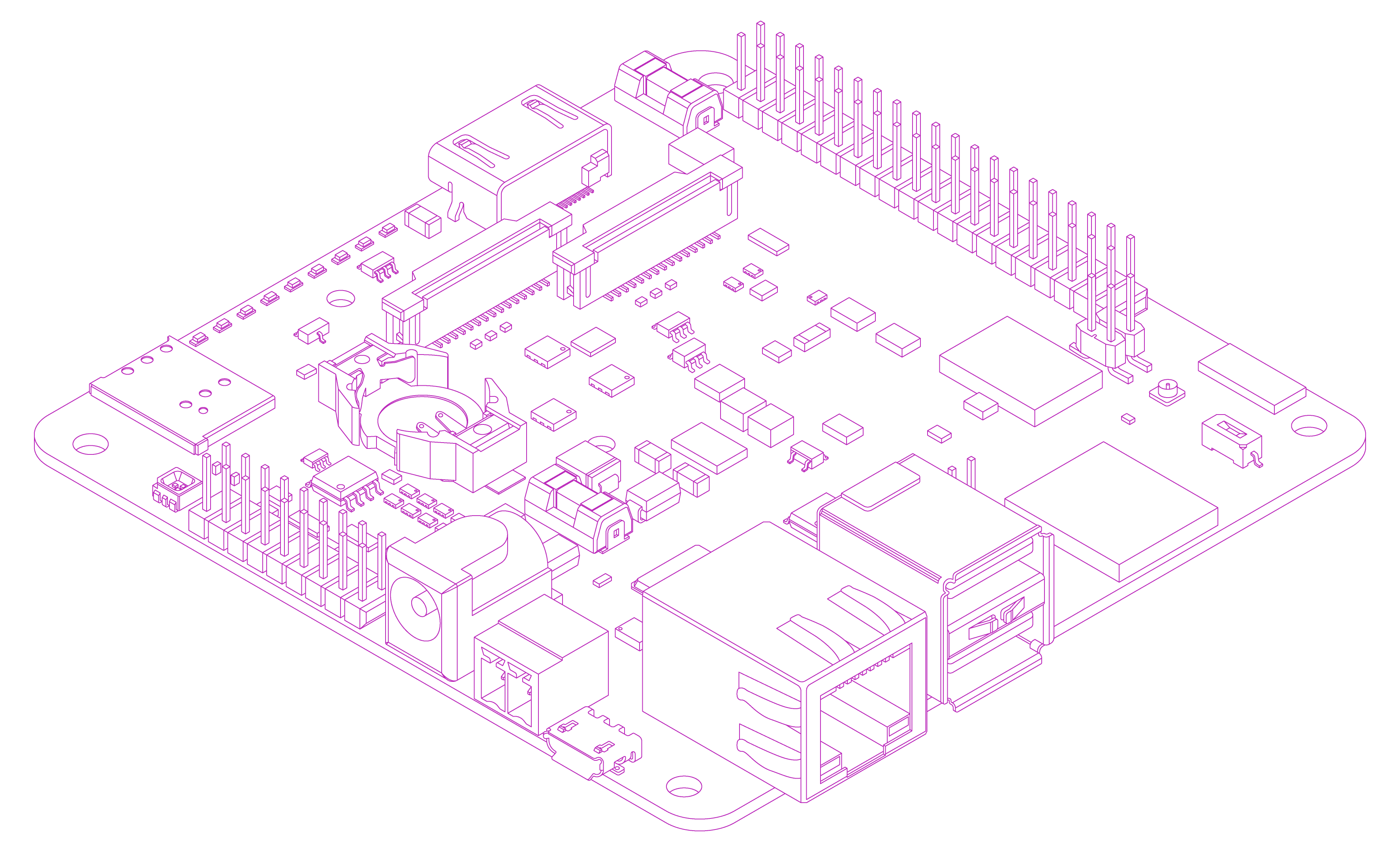
balena鰭
balenaFin 的設(shè)計(jì)考慮了現(xiàn)場部署。它是 Raspberry Compute Module 3 和 3+ Lite (CM3L/CM3+L) 的載板,可以運(yùn)行 Raspberry Pi 可以運(yùn)行的所有軟件,并針對現(xiàn)場部署用例進(jìn)行了強(qiáng)化。
樹莓派計(jì)算模塊
balenaFin 支持 Raspberry Pi 計(jì)算模塊 3 和 3+ lite (CM3L/CM3+L)。
貯存
balenaFin 上的存儲基于工業(yè)級 eMMC 存儲,提供 8GB、16GB、32GB 和 64GB 選項(xiàng)。
力量
balenaFin 具有寬輸入電壓范圍 (6V-24V),特別適用于通常無法提供可靠 5V 的應(yīng)用。
協(xié)處理器
balenaFin 包括一個(gè)支持藍(lán)牙的低功耗協(xié)處理器(32 位 ARM? Cortex M4)。協(xié)處理器可以單獨(dú)運(yùn)行或并行運(yùn)行,并允許以編程方式打開和關(guān)閉主處理器。這在需要低功耗或?qū)崟r(shí)處理的應(yīng)用中特別有用。
連接性
balenaFin 的無線芯片支持 802.11ac/a/b/g/n WiFI 和藍(lán)牙 4.2(包括 SMART 功能)。板上包含一個(gè)雙頻嵌入式天線和一個(gè)用于改善信號覆蓋范圍的外部天線連接器。
輸入輸出
balenaFin 上的 Mini PCI Express 端口為許多不同的模塊帶來了無縫連接。第三方模塊可用于 LTE、Zigbee、LoRA 和 CANBus,并且可以通過利用 mini PCI Express 連接器上的 USB 接口來實(shí)現(xiàn)額外的存儲(這可能需要定制設(shè)計(jì))。balenaFin HAT 接頭可用于連接任何 Raspberry Pi HAT 兼容模塊(PoE、RS232、ZWave 等)。一個(gè)較小的 18 針接頭暴露了協(xié)處理器的模擬和時(shí)間敏感 I/O。V1.1 包括一個(gè)額外的 4 針 USB 接頭,允許無線設(shè)計(jì)應(yīng)用,例如附加存儲、輔助以太網(wǎng)端口、多媒體閱讀器、附加無線電接口等。
樹莓派計(jì)算模塊 3+ Lite
CM3+ 計(jì)算模塊包含 Raspberry Pi 3 Model B+(BCM2837 處理器和 1GB RAM)以及可選的 8GB、16GB 或 32GB 的 eMMC 閃存設(shè)備(相當(dāng)于 Pi 中的 SD 卡)。
所有這些都集成到一個(gè)小型 (67.6mm × 31mm) 板上,該板適合標(biāo)準(zhǔn) DDR2 SODIMM 連接器。閃存直接連接到板上的處理器,但其余處理器接口可通過連接器引腳供用戶使用。您可以獲得 BCM2837 SoC 的全部靈活性(這意味著比標(biāo)準(zhǔn) Raspberry Pi 提供更多的 GPIO 和接口),并且將模塊設(shè)計(jì)到自定義系統(tǒng)中應(yīng)該相對簡單,因?yàn)槲覀円呀?jīng)將所有棘手的部分都放到了模塊本身。這需要與balenaFin連接。
Adafruit AMG8833 紅外攝像機(jī)分線模塊
Panasonic 的這款傳感器是 8x8 紅外熱傳感器陣列。當(dāng)連接到您的微控制器(或 Raspberry Pi)時(shí),它將通過 I2C 返回一組 64 個(gè)單獨(dú)的紅外溫度讀數(shù)。它就像那些花哨的熱像儀,但足夠緊湊和簡單,易于集成。
該部件將測量范圍從 0°C 到 80°C(32°F 到 176°F)的溫度,精度為 +- 2.5°C (4.5°F)。它可以在最遠(yuǎn) 7 米 (23) 英尺的距離內(nèi)檢測到人。最大幀速率為 10Hz,非常適合創(chuàng)建自己的人體探測器或迷你熱像儀。我們有在 Arduino 或兼容設(shè)備(傳感器通過 I2C 通信)或在帶有 Python 的 Raspberry Pi 上使用此分線器的代碼。在 Pi 上,借助 SciPy python 庫的一些圖像處理幫助,我們能夠插入 8x8 網(wǎng)格并獲得一些非常好的結(jié)果!
AMG8833 是 Panasonic 的下一代 8x8 熱紅外傳感器,提供比其前身 AMG8831 更高的性能。該傳感器僅支持 I2C,并且具有可配置的中斷引腳,當(dāng)任何單個(gè)像素高于或低于您設(shè)置的閾值時(shí),該引腳可以觸發(fā)。
英特爾神經(jīng)計(jì)算棒 2
英特爾神經(jīng)計(jì)算棒 2 由英特爾 Movidius X VPU 提供支持,可提供行業(yè)領(lǐng)先的性能、功率和功率。NEURAL COMPUTE 支持 OpenVINO,這是一個(gè)加速解決方案開發(fā)和簡化部署的工具包。神經(jīng)計(jì)算棒 2 提供即插即用的簡單性,支持通用框架和開箱即用的示例應(yīng)用程序。使用任何帶有 USB 端口的平臺進(jìn)行原型設(shè)計(jì)和操作,無需依賴云計(jì)算。與前幾代產(chǎn)品相比,英特爾 NCS 2 每秒可提供 4 萬億次操作,性能提升 8 倍。
它能做什么:
借助英特爾 NCS 2 的增強(qiáng)功能,可以輕松將計(jì)算機(jī)視覺和人工智能引入物聯(lián)網(wǎng) (IoT) 和邊緣設(shè)備原型。對于開發(fā)智能相機(jī)、無人機(jī)、工業(yè)機(jī)器人或下一個(gè)必備智能設(shè)備的開發(fā)人員而言家用設(shè)備,英特爾 NCS 2 提供更快、更智能的原型制作所需。
看起來像標(biāo)準(zhǔn) USB 拇指驅(qū)動(dòng)器的東西隱藏在里面。英特爾 NCS 2 由最新一代的英特爾 VPU——英特爾 Movidius Myriad X VPU 提供支持。這是第一個(gè)具有神經(jīng)計(jì)算引擎的產(chǎn)品——專用硬件神經(jīng)網(wǎng)絡(luò)推理加速器可提供額外的性能。結(jié)合支持更多網(wǎng)絡(luò)的英特爾分發(fā)版 OpenVINO 工具套件,英特爾 NCS 2 為開發(fā)人員提供了更大的原型設(shè)計(jì)靈活性。此外,多虧了英特爾 AI:在生產(chǎn)生態(tài)系統(tǒng)中,開發(fā)人員現(xiàn)在可以將他們的英特爾 NCS 2 原型移植到其他外形尺寸并產(chǎn)品化他們的設(shè)計(jì)。
這個(gè)怎么運(yùn)作:
借助筆記本電腦和英特爾 NCS 2,開發(fā)人員可以在幾分鐘內(nèi)啟動(dòng)并運(yùn)行他們的 AI 和計(jì)算機(jī)視覺應(yīng)用程序。英特爾 NCS 2 在標(biāo)準(zhǔn) USB 3.0 端口上運(yùn)行,不需要額外的硬件,使用戶能夠無縫轉(zhuǎn)換 PC 訓(xùn)練模型,然后將其本地部署到各種設(shè)備,無需互聯(lián)網(wǎng)或云連接。
第一代英特爾 NCS 于 2017 年 7 月推出,已為數(shù)以萬計(jì)的開發(fā)人員社區(qū)提供了動(dòng)力,已在 700 多個(gè)開發(fā)人員視頻中進(jìn)行了專題介紹,并已在數(shù)十篇研究論文中得到使用。現(xiàn)在,憑借 NCS 2 的更高性能,英特爾正在幫助 AI 社區(qū)創(chuàng)建更雄心勃勃的應(yīng)用程序。
特征:
提高生產(chǎn)力:
- 以低成本減少對具有多功能硬件處理能力的神經(jīng)網(wǎng)絡(luò)進(jìn)行原型設(shè)計(jì)或調(diào)整的時(shí)間。
- 與原始英特爾 Movidius 神經(jīng)計(jì)算棒相比,增強(qiáng)的硬件處理能力。
- 利用 16 個(gè)內(nèi)核而不是 12 個(gè)內(nèi)核以及一個(gè)神經(jīng)計(jì)算引擎,一個(gè)專用的深度神經(jīng)網(wǎng)絡(luò)加速器。
- 深度神經(jīng)網(wǎng)絡(luò)推理的性能提升高達(dá) 8 倍,具體取決于網(wǎng)絡(luò)。
- 可負(fù)擔(dān)性加速了深度神經(jīng)網(wǎng)絡(luò)的應(yīng)用。
- 改變 AI 開發(fā)工具包體驗(yàn)。
- 即插即用的簡單性。
- 實(shí)惠的價(jià)格點(diǎn)。
- 支持通用框架,包括開箱即用和快速開發(fā)。
發(fā)現(xiàn)效率:
- 卓越的每瓦性能將機(jī)器視覺帶到了新的領(lǐng)域。
- 在不依賴云計(jì)算連接的情況下“在邊緣”運(yùn)行。
- 深度學(xué)習(xí)原型現(xiàn)在可以在筆記本電腦、單板計(jì)算機(jī)或任何帶有 USB 端口的平臺上使用。
- 易于使用且價(jià)格合理——利用更高的每瓦性能和高效的無風(fēng)扇設(shè)計(jì)。
- 結(jié)合英特爾? Movidius? Myriad? X VPU 的硬件優(yōu)化性能和英特爾? Distribution of OpenVINO”工具包,加速基于深度神經(jīng)網(wǎng)絡(luò)的應(yīng)用程序。
- 在同類產(chǎn)品中率先采用神經(jīng)計(jì)算引擎——一個(gè)專用的硬件加速器。
- 16 個(gè)強(qiáng)大的處理內(nèi)核(稱為 SHAVE 內(nèi)核)和超高吞吐量智能內(nèi)存結(jié)構(gòu)共同使英特爾 Movidius Myriad X VPU 成為設(shè)備上深度神經(jīng)網(wǎng)絡(luò)和計(jì)算機(jī)視覺應(yīng)用的行業(yè)領(lǐng)導(dǎo)者。
- 在芯片上具有全新的深度神經(jīng)網(wǎng)絡(luò) (DNN) 推理引擎。
原型設(shè)計(jì)更簡單的多功能性:
- 英特爾分發(fā)的 OpenVINO 工具套件簡化了開發(fā)體驗(yàn)。
- 在英特爾神經(jīng)計(jì)算棒 2 上制作原型,然后將您的深度神經(jīng)網(wǎng)絡(luò)部署到基于英特爾 Movidius Myriad X VPU 的嵌入式設(shè)備上。
- 簡化工作原型的路徑。
- 跨英特爾硬件擴(kuò)展工作負(fù)載并最大化性能。
- 強(qiáng)大的英特爾 Distribution of OpenVINO 工具套件可簡化模擬人類視覺的應(yīng)用程序和解決方案的移植和部署。
- 英特爾發(fā)布的 OpenVINO 工具套件簡化了多平臺計(jì)算機(jī)視覺解決方案的開發(fā)——提高了深度學(xué)習(xí)性能。
- 現(xiàn)在,跨英特爾加速技術(shù)套件開發(fā)異構(gòu)執(zhí)行應(yīng)用程序變得更加容易。一次開發(fā)并在英特爾 CPU、VPU、集成顯卡或 FPGA 上進(jìn)行部署。
- 如果需要,用戶可以實(shí)現(xiàn)自己的自定義層并在 CPU 上執(zhí)行這些層,而模型的其余部分在 VPU 上運(yùn)行。
軟件
Raspbian(目前為 Raspberry Pi 操作系統(tǒng))
它是基金會官方支持的操作系統(tǒng)。
Raspberry Pi OS 預(yù)裝了大量用于教育、編程和一般用途的軟件。它有 Python、Scratch、Sonic Pi、Java 等等。
ZIP 存檔中包含的帶有桌面映像的 Raspberry Pi OS 大小超過 4GB,這意味著這些存檔使用某些平臺上的舊解壓縮工具不支持的功能。
注意:這里我們必須使用專門為 balenaFin 設(shè)計(jì)的 Raspbian Image。從這里下載。
balena蝕刻機(jī)
balenaEtcher 是一個(gè)免費(fèi)的開源實(shí)用程序,用于將圖像文件(如 .iso 和 .img 文件)以及壓縮文件夾寫入存儲介質(zhì)以創(chuàng)建實(shí)時(shí) SD 卡和 USB 閃存驅(qū)動(dòng)器。它由 balena 開發(fā),并在 Apache License 2.0 下獲得許可。從這里下載。
OpenVINO
OpenVINO 工具包是一個(gè)免費(fèi)工具包,可促進(jìn)從框架優(yōu)化深度學(xué)習(xí)模型,并使用推理引擎將其部署到英特爾硬件上。它是用 Python 和 C++ 編寫的。
解釋與工作
所以這里是我們項(xiàng)目的基本演示,在一段中解釋。因此,首先將 AMG8833 相機(jī)傳感器板連接到 balenaFin,并且英特爾神經(jīng)計(jì)算棒 2 需要連接到 Pi 以提高模型的性能并使用英特爾的 OpenVino 對其進(jìn)行訓(xùn)練。下面通過 GIF 解釋了傳感器的使用。
現(xiàn)在,由 Fin 組成的完整設(shè)備將放置在金屬棒的底部(例如金屬探測器中的一個(gè)),如下所示。

評估
如果像巢這樣的大型熱源不明顯,敏感的熱像儀可能能夠檢測到不規(guī)則的熱模式、水分和其他表明存在害蟲的損壞跡象,例如缺少絕緣層或墻壁上的孔表明存在害蟲。入口點(diǎn)。了解要查找的模式需要培訓(xùn)和練習(xí),因?yàn)楹苋菀族e(cuò)誤地解釋圖像。
以下是嘗試定位以下常見入侵者時(shí)要尋找的一些指標(biāo):
白蟻
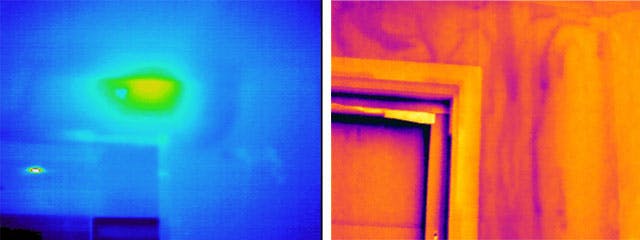
白蟻巢穴可能作為熱點(diǎn)可見(左),而白蟻隧道的水分含量很高,可以通過熱成像(右)檢測到。
通過尋找巢穴、水分來源和墻壁損壞的證據(jù)可以找到白蟻。當(dāng)白蟻進(jìn)入家中時(shí),它們會以二氧化碳的形式從消化系統(tǒng)中釋放熱量,并建造含水量高的泥管,從而在墻壁、天花板和地板的表面形成不規(guī)則的熱量模式。
嚙齒動(dòng)物
嚙齒動(dòng)物(如左側(cè)的負(fù)鼠)或它們的巢穴可能是可見的,或者野生動(dòng)物活動(dòng)可能會留下諸如缺少絕緣材料(右)之類的線索。
嚙齒動(dòng)物和其他野生動(dòng)物可能會形成可以被檢測到的巢穴,或者可能已經(jīng)損壞了墻壁或移動(dòng)了絕緣層,并產(chǎn)生了可以在熱環(huán)境中看到的冷點(diǎn)。夜間出現(xiàn)的夜間動(dòng)物也可以通過熱成像進(jìn)行追蹤,該熱成像在完全黑暗的環(huán)境中工作。
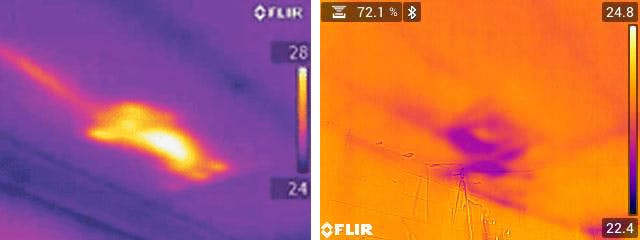
大黃蜂和其他社會昆蟲

大黃蜂巢顯示為熱的熱點(diǎn)。
昆蟲是冷血?jiǎng)游铮鼈兇_實(shí)會產(chǎn)生熱量。黃蜂巢、蜂巢或其他大型群居昆蟲的熱量通常會產(chǎn)生足夠的熱量,從而被熱像儀檢測到。
1)使用以下電路連接將 AMG8833 IR Camera Sensor Breakout 連接到 Raspberry Pi -
balenaFin AMG8833 IR Camera
3V3 VIN
GND GND
GPIO 2 SDA
GPIO 3 SCL
GPIO 4 INT
2)從此鏈接安裝 Intel OpenVino Toolkit 。
3)按照本教程下載并在連接英特爾 Movidius 神經(jīng)計(jì)算棒 2 的 balenaFin 上運(yùn)行演示。
4)或者,如果您想在英特爾 PC 上部署它,請按照我制作的指南進(jìn)行操作。
5)從 Internet 上可用的各種資源中收集熱數(shù)據(jù),例如。或者,您可以在使用紅外攝像機(jī)時(shí)收集您自己的自定義圖像數(shù)據(jù)。
6)您可以在 OpenVino SDK 本身中訓(xùn)練您的模型,也可以使用Google Colab或Jupyter Notebooks來訓(xùn)練。
7)然后您可以使用 OpenVino 團(tuán)隊(duì)的本教程和指南將此數(shù)據(jù)導(dǎo)出到 OpenVino SDK 開發(fā)平臺。
訓(xùn)練模型
第 1 部分 - 區(qū)分豆娘和蝴蝶
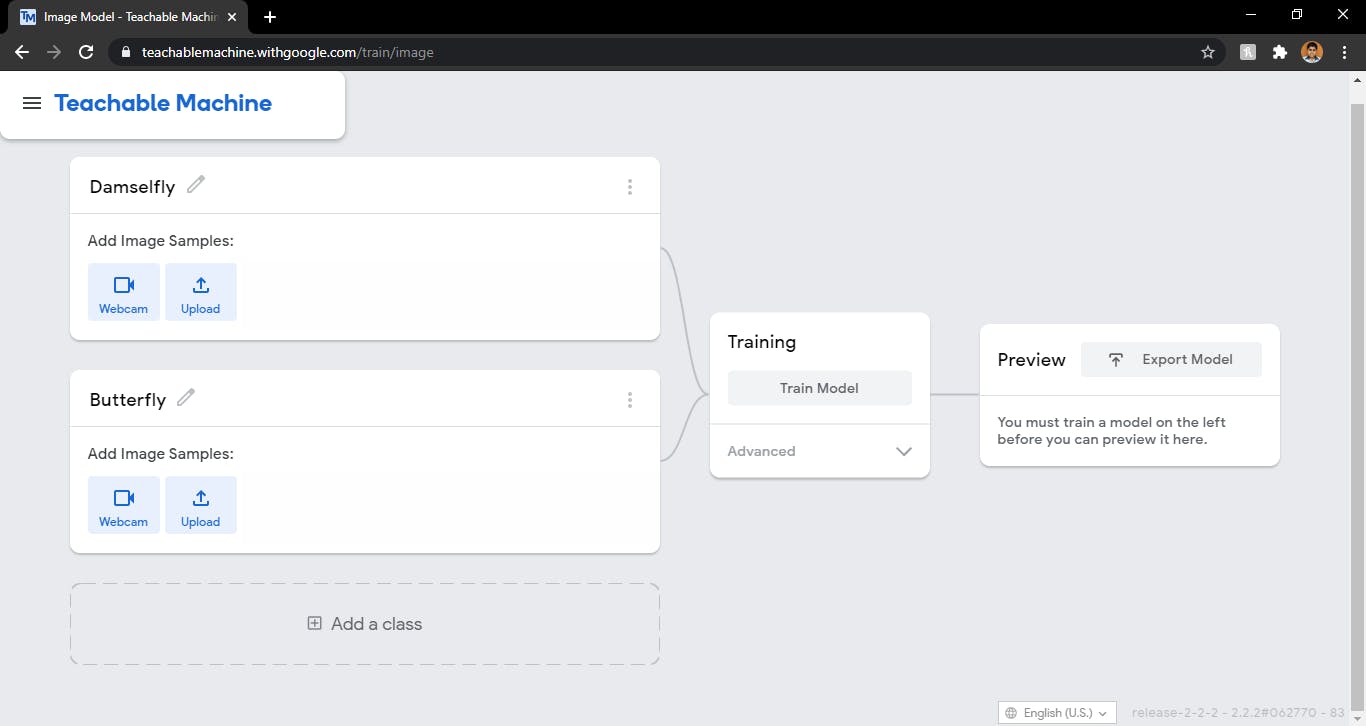
我們正在使用Google 的 Teachable Machine來訓(xùn)練能夠在豆娘和蝴蝶之間進(jìn)行分類的模型。
第1 步 -首先從我們的 Google Drive 下載蝴蝶和豆娘的熱圖像。
第 2 步 -并按照以下步驟開始訓(xùn)練數(shù)據(jù)。
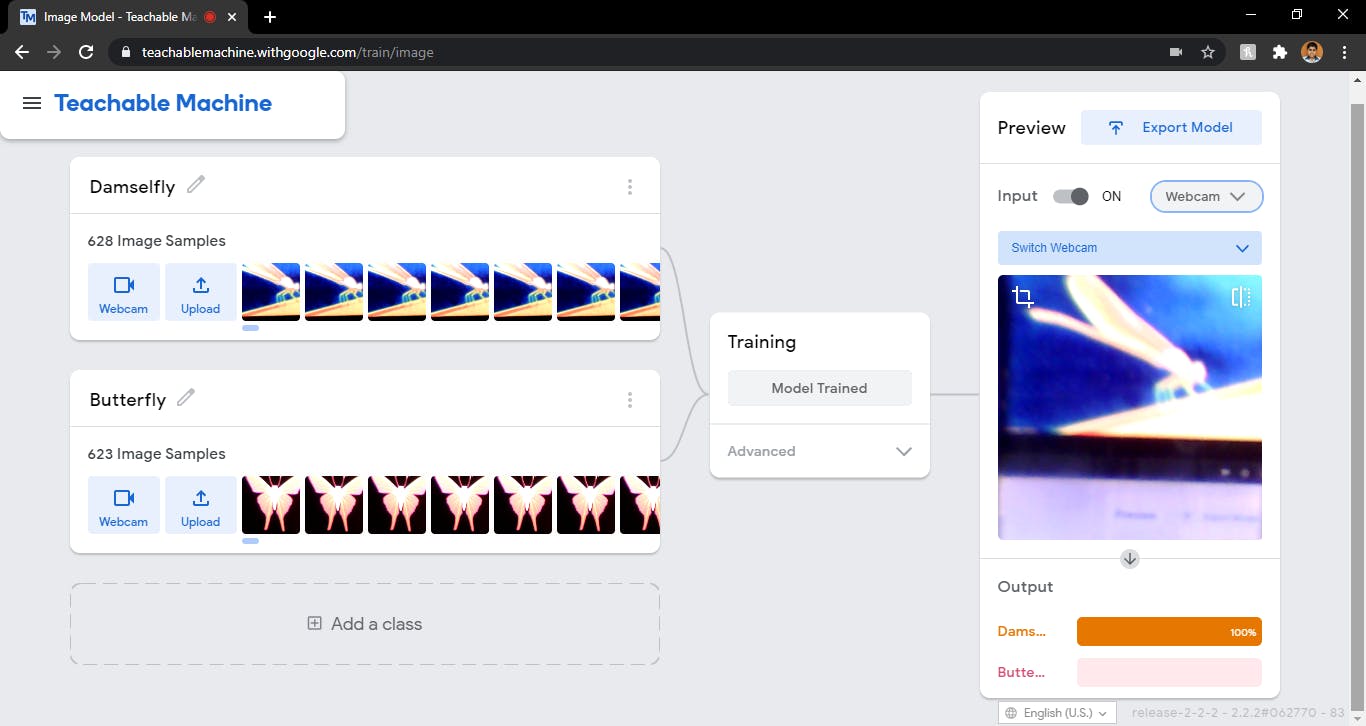
第 3 步 -單擊 Image Project,然后在 Class 1 和 Class 2 框中分別將它們命名為 Damselfly 和 Butterfly,如下所示。
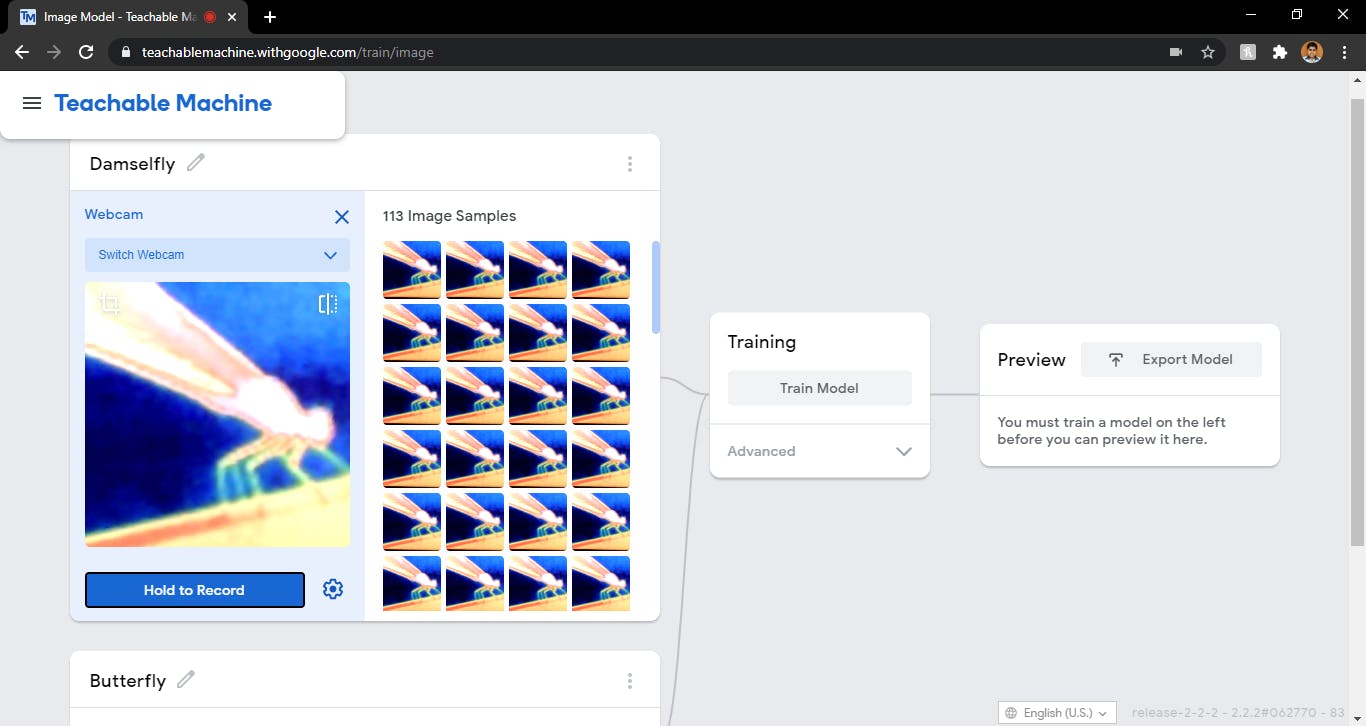
第 4 步 -通過我們 Google Drive 中提供的圖像訓(xùn)練數(shù)據(jù)。您可以從文件上傳,也可以使用網(wǎng)絡(luò)攝像頭,然后通過顯示來自手機(jī)的圖像進(jìn)行訓(xùn)練,如下所示。
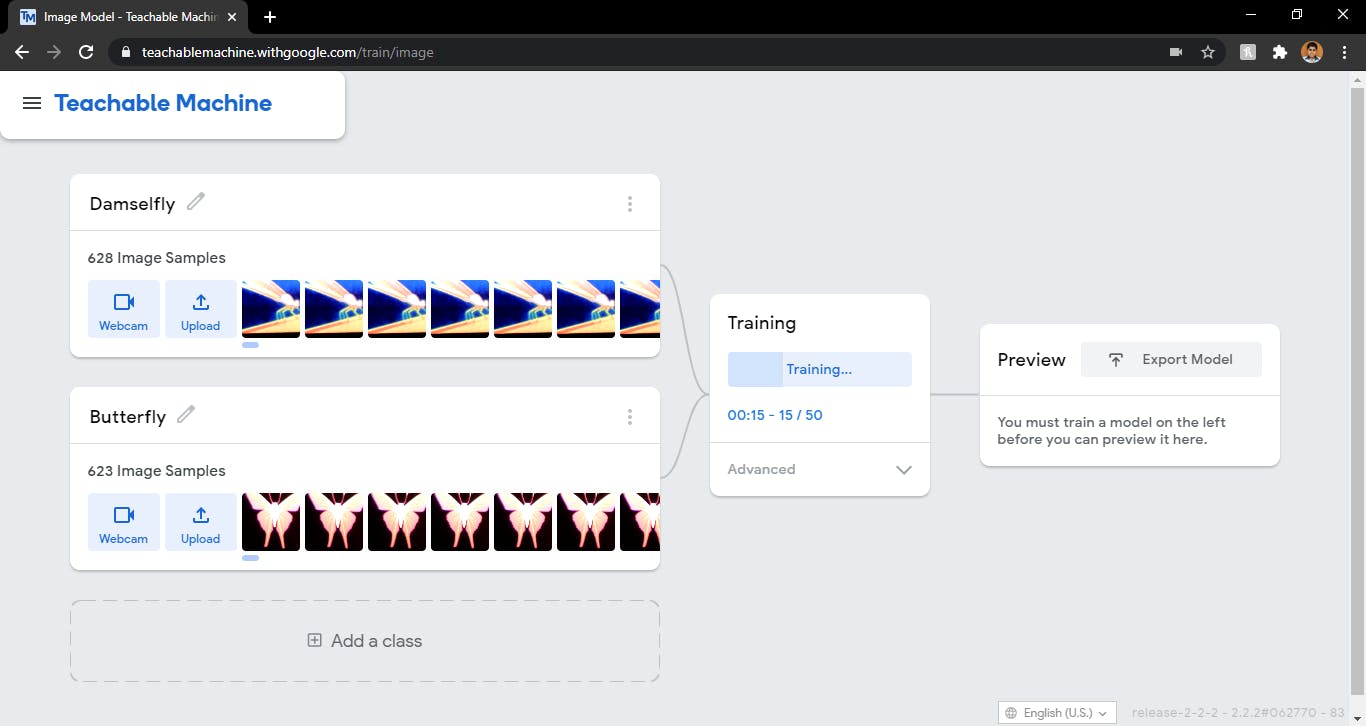
第 5 步 -然后單擊屏幕中間的訓(xùn)練模型按鈕。等待一段時(shí)間,然后它將開始訓(xùn)練模型。
對數(shù)據(jù)進(jìn)行分類
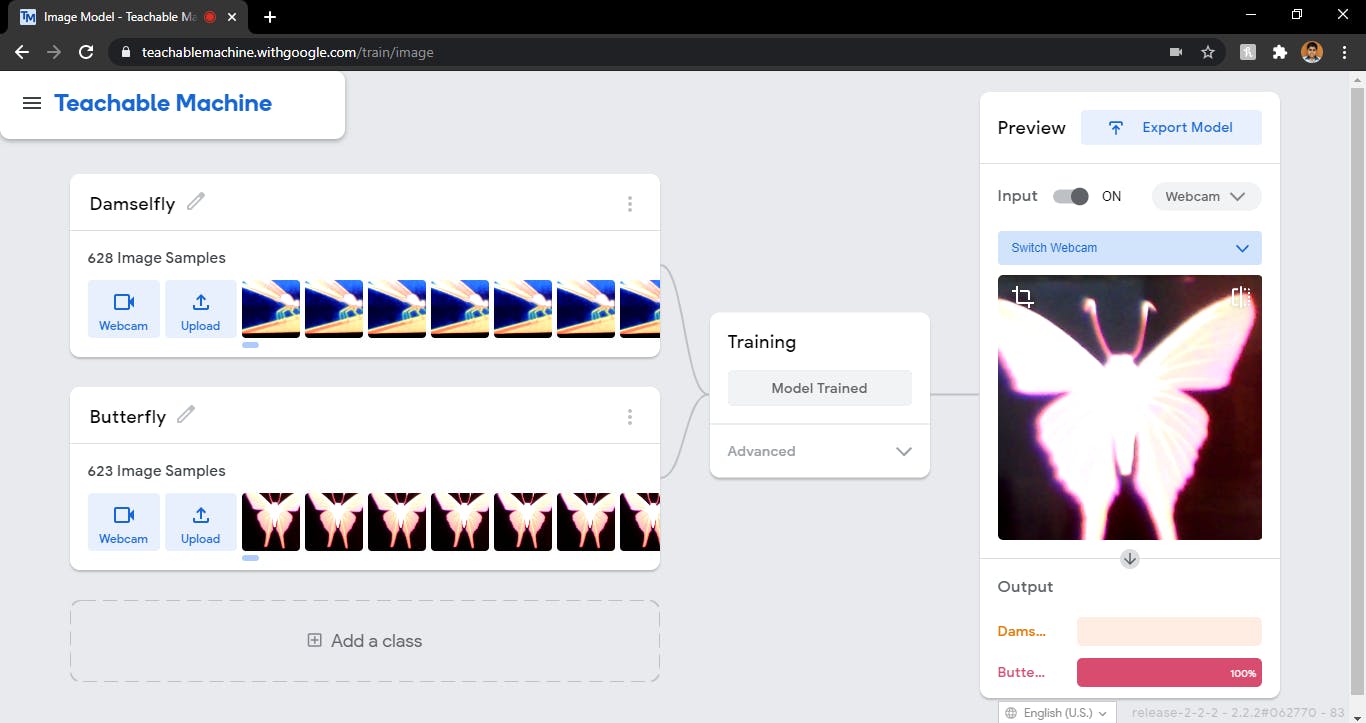
成功訓(xùn)練后,它將彈出并打開您的網(wǎng)絡(luò)攝像頭進(jìn)行實(shí)時(shí)分類,如下所示。
然后單擊屏幕頂部的導(dǎo)出模型選項(xiàng)。點(diǎn)擊后會顯示如下畫面。
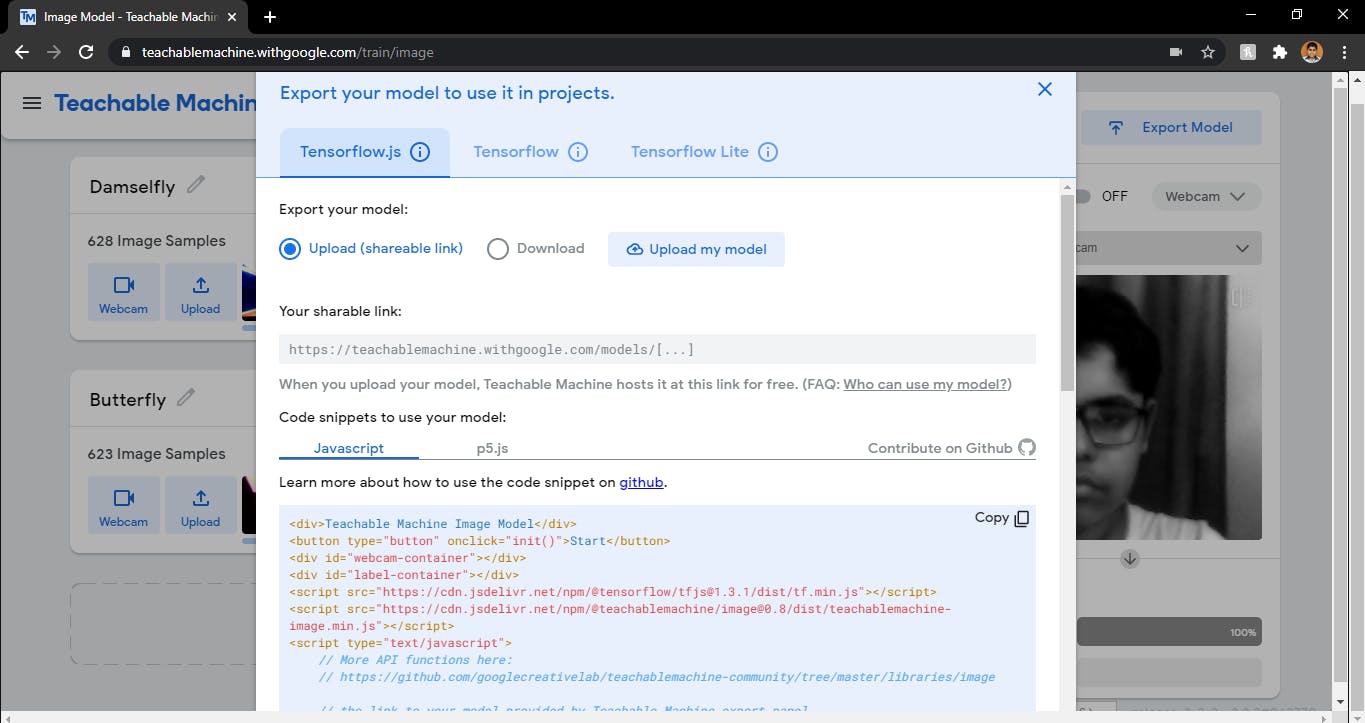
然后點(diǎn)擊 TensorFlow Lite 選項(xiàng),如下圖所示。
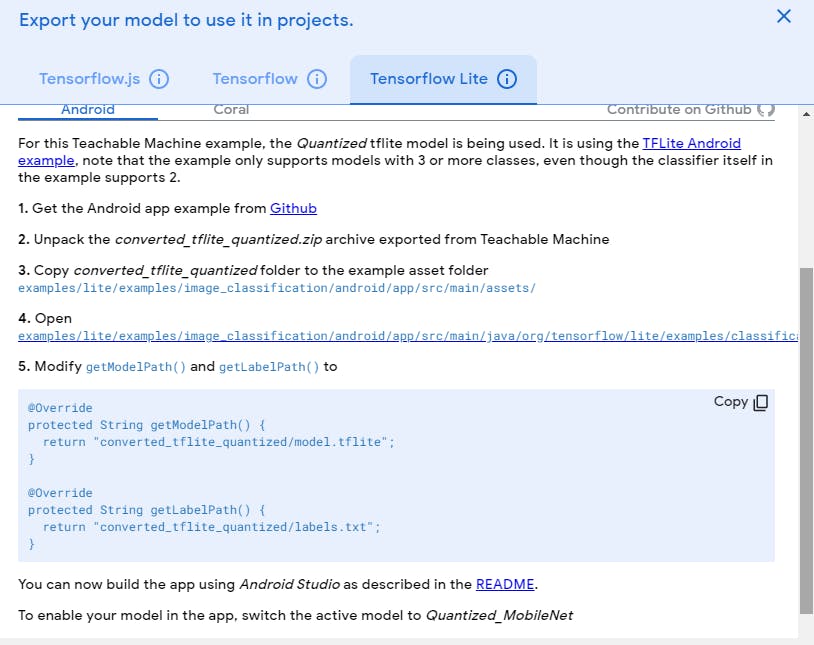
恭喜!您已在網(wǎng)絡(luò)上成功訓(xùn)練和分類模型。現(xiàn)在是時(shí)候在硬件上運(yùn)行它了。
在硬件上運(yùn)行
在這里,我們正在測試兩種情況:
使用 Google Coral USB 加速器在 balenaFin 上運(yùn)行
Coral USB 加速器使用 Coral Edge TPU ,因此在 TensorFlow Lite 環(huán)境中運(yùn)行時(shí)增加了模型。
步驟1
按照Coral 的官方說明安裝 edgetpu 庫
第2步
pip 像這樣安裝以下軟件包:
pip3 install Pillow opencv-python opencv-contrib-python
第 3 步
從 TM2 下載模型
第4步
使用我們存儲庫中的此代碼來運(yùn)行模型
使用英特爾神經(jīng)計(jì)算棒在 balenaFin 上運(yùn)行
由于硬件和軟件的限制,未完成:(
制作這個(gè)項(xiàng)目時(shí)面臨的限制
在閱讀了這個(gè)項(xiàng)目帖子后,你們中的大多數(shù)人會詢問我們在 NCS 2 上運(yùn)行的部分。好吧,我們在開發(fā)這個(gè)項(xiàng)目時(shí)遇到了一些嚴(yán)峻的情況。以下是一些 -
1)我們沒有人在家里有熱敏/紅外相機(jī)。我們通過為我們收集一些圖像數(shù)據(jù)在許多地方尋求幫助。沒有一個(gè)論壇或地方這樣做。所以我(Arijit)必須閱讀 2 篇完整的研究論文才能獲得一些豆娘和蝴蝶的熱圖像數(shù)據(jù)。我們只得到了 2 種類型的熱圖像,然后我們降低了它的亮度,然后把它變成了大約 650 張圖像來訓(xùn)練模型。
2)包括 David W 和 Sahaj Sarup 在內(nèi)的我們都沒有 NCS 。最后,我們得到了 David Tischler 的幫助,他慷慨地提供了與 Movidius 棒 (NCS 1) 連接的 Pi 4。
3)我們確實(shí)制作了我們甚至測試過的模型,它運(yùn)行得非常快,然后模型被轉(zhuǎn)換為 TensorFlow Lite 模型。
4)我們幾乎沒有時(shí)間花在樹莓派上,而且由于我們來自不同的時(shí)區(qū),我們在進(jìn)行一些討論和談話方面也遇到了困難。
5)自從我們獲得對 Pi 的訪問權(quán)限以來,我們連續(xù)嘗試了 2 天。但是我們無法使模型轉(zhuǎn)換為 OpenVINO 并使其啟動(dòng)并運(yùn)行:(
分步說明
1. 作為第一步,我們將掃描并通過將 AMG8833 攝像頭傳感器分線板連接到鰭來獲取數(shù)據(jù)。
2. 使用 Intel 的 OpenVino 軟件進(jìn)行所需的分析,它會得到加速,即 fps(每秒幀數(shù))速度會逐漸提高。
3. 然后對該區(qū)域進(jìn)行全面掃描,然后鰭將引導(dǎo)農(nóng)民將殺蟲劑放置在哪里以便更好地使用。
演示視頻
您還可以在這里查看并試用我們托管在 Teachable Machine 網(wǎng)站上的模型。
特征
1、成本低,使用方便。
2. 無需技術(shù)背景即可使用此設(shè)備
3. 能夠在農(nóng)業(yè)中正確使用化學(xué)品。
4. 預(yù)防因噴灑不需要的化學(xué)物質(zhì)而引起的有害疾病。
未來的工作
為了進(jìn)一步發(fā)展,我們正在考慮使用一些高功率相機(jī),即使它們正在飛行,它們甚至能夠跟蹤和分類害蟲。我們正在考慮降低成本,甚至試圖讓我們的模型在廉價(jià)的安卓手機(jī)上運(yùn)行,??并連接一個(gè)廉價(jià)的熱像儀,這將幫助貧困農(nóng)民輕松購買和使用這項(xiàng)技術(shù)來改善人類生活。
-X-
感謝您查看我們的項(xiàng)目。如果您有任何疑問,請不要忘記下拉任何關(guān)于查詢或任何問題的評論。我們將嘗試肯定地回答他們:)
?
- 基于深度學(xué)習(xí)的道路表面裂縫檢測技術(shù) 73次下載
- 基于預(yù)訓(xùn)練模型和長短期記憶網(wǎng)絡(luò)的深度學(xué)習(xí)模型 19次下載
- 3小時(shí)學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)與深度學(xué)習(xí)課件下載 0次下載
- 深度模型中的優(yōu)化與學(xué)習(xí)課件下載 3次下載
- 基于深度學(xué)習(xí)的顯著性目標(biāo)檢測的數(shù)據(jù)集和評估準(zhǔn)則 0次下載
- 基于深度學(xué)習(xí)的快速發(fā)現(xiàn)警告吸煙檢測模型 124次下載
- 基于RNN和深度學(xué)習(xí)的Linux遠(yuǎn)控木馬檢測 15次下載
- 基于深度學(xué)習(xí)的疲勞駕駛檢測算法及模型 25次下載
- 一種基于深度學(xué)習(xí)的焊點(diǎn)位置檢測方法 9次下載
- 深度學(xué)習(xí)模型的對抗攻擊及防御措施 75次下載
- 如何使用深度學(xué)習(xí)進(jìn)行視頻行人目標(biāo)檢測 22次下載
- 深度學(xué)習(xí)是什么?了解深度學(xué)習(xí)難嗎?讓你快速了解深度學(xué)習(xí)的視頻講解 16次下載
- 人工智能深度學(xué)習(xí)目標(biāo)檢測的詳細(xì)資料免費(fèi)下載 44次下載
- 基于深度學(xué)習(xí)的安卓惡意應(yīng)用檢測 4次下載
- 儲糧害蟲智能檢測方法的分析_周龍 1次下載
- 深度學(xué)習(xí)在工業(yè)機(jī)器視覺檢測中的應(yīng)用 1136次閱讀
- 基于深度學(xué)習(xí)的無人機(jī)檢測與識別技術(shù) 1369次閱讀
- 基于AI深度學(xué)習(xí)的缺陷檢測系統(tǒng) 1596次閱讀
- 深度學(xué)習(xí)在視覺檢測中的應(yīng)用 806次閱讀
- 基于深度學(xué)習(xí)的小目標(biāo)檢測 994次閱讀
- 如何基于深度學(xué)習(xí)模型訓(xùn)練實(shí)現(xiàn)圓檢測與圓心位置預(yù)測 2109次閱讀
- 基于YOLO技術(shù)的植物檢測與計(jì)數(shù) 919次閱讀
- 深度學(xué)習(xí)在工業(yè)缺陷檢測中的應(yīng)用 1643次閱讀
- 瑞薩電子深度學(xué)習(xí)算法在缺陷檢測領(lǐng)域的應(yīng)用 917次閱讀
- 軟件漏洞檢測場景中的深度學(xué)習(xí)模型實(shí)證研究 724次閱讀
- 傅里葉變換如何用于深度學(xué)習(xí)領(lǐng)域 1363次閱讀
- 康耐視深度學(xué)習(xí)實(shí)現(xiàn)高效血清質(zhì)量檢測 1030次閱讀
- 深度學(xué)習(xí)中的圖像分割 1288次閱讀
- 深度學(xué)習(xí)和機(jī)器學(xué)習(xí)深度的不同之處 淺談深度學(xué)習(xí)的訓(xùn)練和調(diào)參 4342次閱讀
- 如何區(qū)分深度學(xué)習(xí)與機(jī)器學(xué)習(xí) 1965次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論