 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
在許多物聯網場景中,可能需要自動化來物理移動某些東西。為此,您需要使用某種類型的電機。在此示例中,我們將使用L293DNE芯片和運行 Windows IoT Core 操作系統的 Raspberry Pi 2控制單個直流電機。
l293d.pdf
所需材料
- 運行 Windows IoT Core 的 Raspberry Pi 2
- 帶帶狀電纜的 Pi Cobbler(可選)
- L293DNE芯片
- 直流電機(6v電機)
- 一個 4xAA 電池組(為電機供電)
- 面包板
- 各種MM跳線
硬件設置
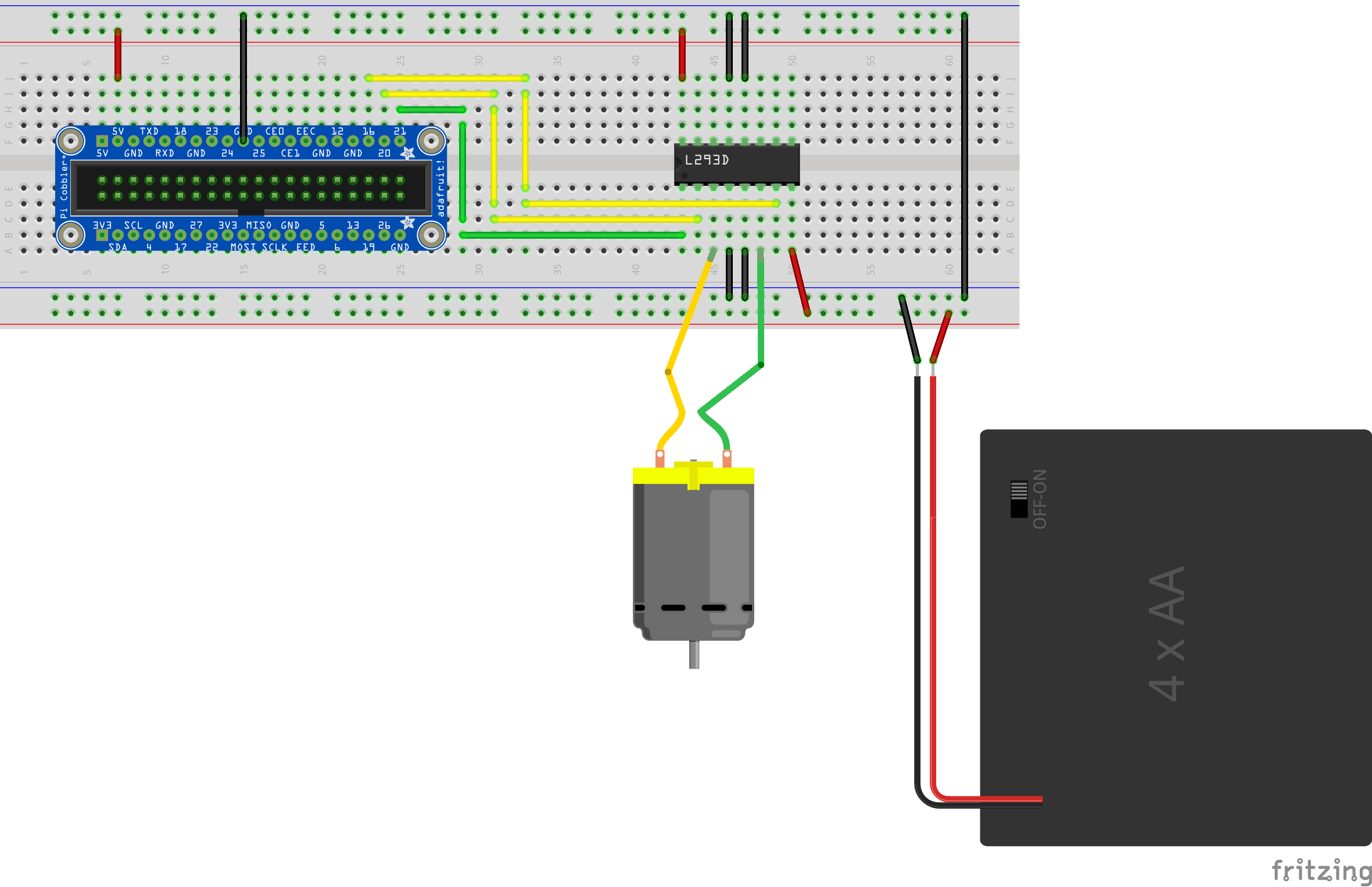
單直流電機控制接線圖
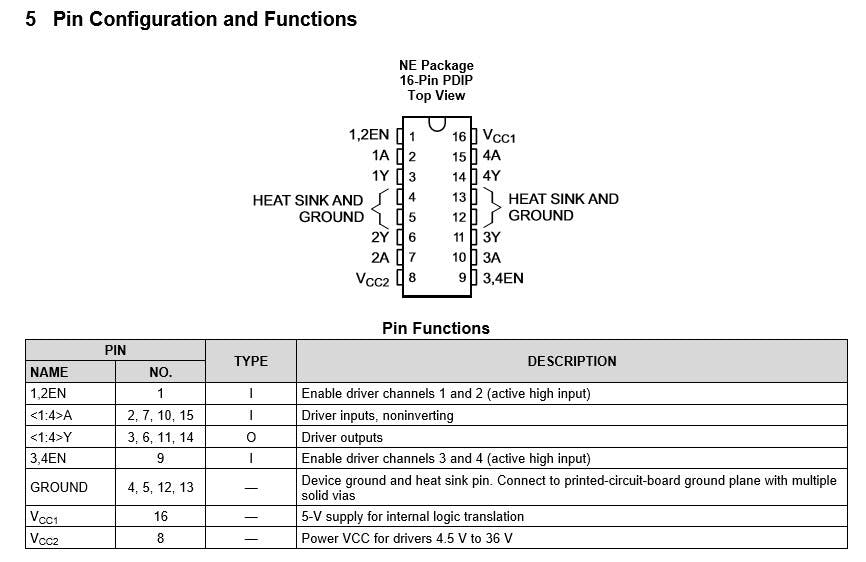
數據表中的 L293D 引腳輸出圖
接線細節
- Cobbler 5v 到面包板電源軌 #1
- Cobbler GND 到面包板接地軌 #1
- 面包板接地軌 #1 到對面的面包板接地軌 #2
- L293D 引腳 4、5、12、13 到面包板接地軌
- L293D 引腳 16 (VCC1) 到面包板電源軌
- Cobbler 引腳 21 到 L293D 引腳 1 (1,2EN)
- Cobbler 引腳 20 到 L293D 引腳 2 (1A)
- Cobbler 引腳 16 到 L293D 引腳 7 (2A)
- 電池組正極(紅線)到面包板電源軌 #2
- 電池組接地(黑線)到面包板接地軌 #2
- L293D 引腳 8 (VCC2) 到面包板電源軌 #2
- 一根電機線(可互換)到 L293D 引腳 3 (1Y)
- 一根電機線(可互換)到 L293D 引腳 6 (2Y)
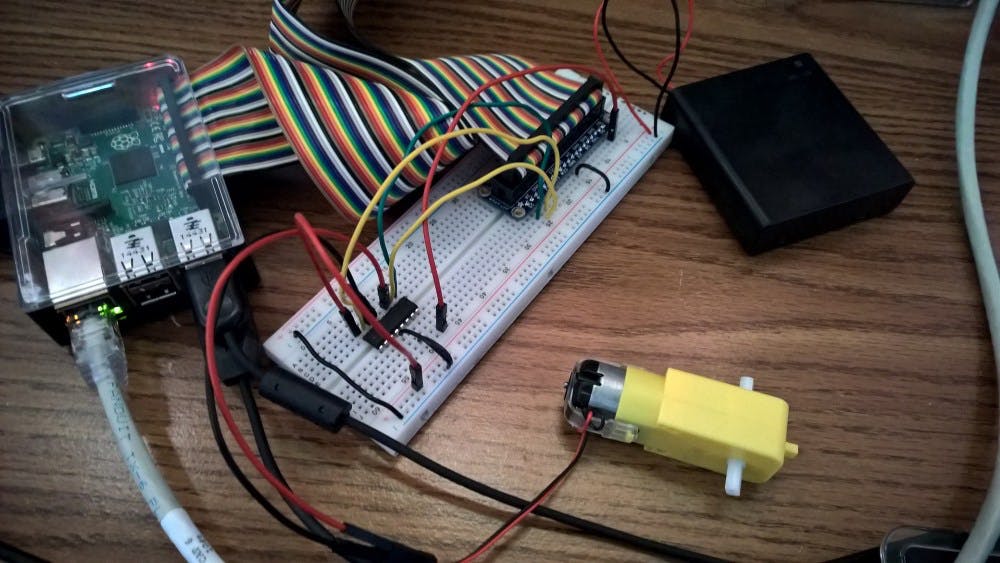
直流電機控制接線
LD293D集成電路
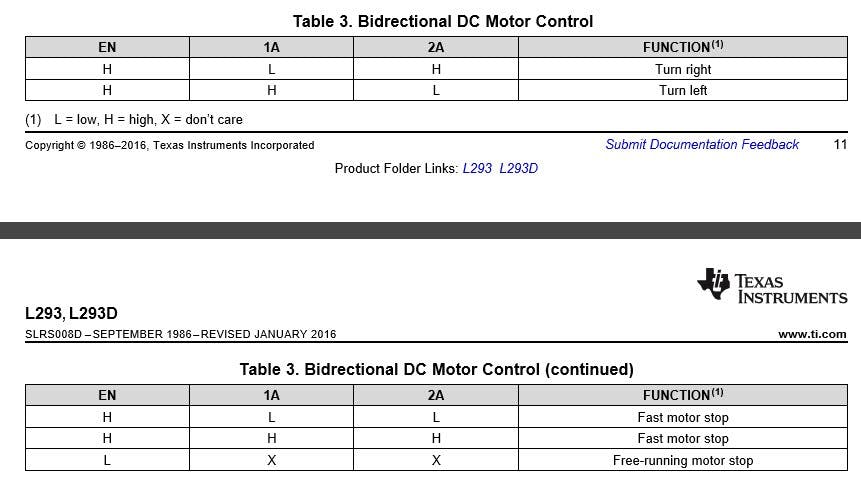
該項目對實現直流電機的雙向控制進行了簡單的考察。有多種方法可以實現此解決方案,這只是其中一種。L293D 芯片能夠控制兩個電機,但在本例中,我們將僅使用 IC 的一側來控制一個電機。該 IC 依靠 5V 邏輯工作,通過引腳 16 或 VCC1 饋送到芯片。直流電機需要的安培數比 Raspberry Pi 所能輸出的要大,因此我們通過引腳 8 或 VCC2 使用外部電池為它提供不同的電源。為了控制電機,其使能引腳必須設置為高電平,在我們的例子中,我們使用電機控制 IC 的左側,因此將是引腳 1 (1,2 EN)。微控制器輸入(1A 或引腳 2 和 2A 或引腳 7)用于控制電機旋轉的方向,
數據表中的直流電機控制表
軟件
在此解決方案中,創建了一個新的空白通用 Windows 應用程序并將其命名為 PiDCMotorControl。添加了對 UWP 的 Windows IoT 擴展的引用。為了創建 UI,將 MainPage.xaml 清單替換為以下內容:
用戶界面定義:
????x:Class="PiDCMotorControl.MainPage"
????xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"
????xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml"
????xmlns:local="using:PiDCMotorControl"
????xmlns:d="http://schemas.microsoft.com/expression/blend/2008"
????xmlns:mc="http://schemas.openxmlformats.org/markup-compatibility/2006"
????mc:Ignorable="d">
?
????<Grid Background="{ThemeResource ApplicationPageBackgroundThemeBrush}">
????????<Grid.RowDefinitions>
????????????"50" />
????????????"50" />
????????????"50" />
????????????"50" />
????????????"50" />
????????Grid.RowDefinitions>
????????<Grid.ColumnDefinitions>
????????????"200" />
????????????"200" />
????????????
????????Grid.ColumnDefinitions>
????????FontSize="30" Grid.Row="1" Grid.ColumnSpan="3">Motor Control
????????<Button Name="btnIgnitionOn" Margin="5" Background="Green" Foreground="White"??Grid.Row="2"
????????????????Click="btnIgnitionOn_Click">Ignition ONButton>
????????<Button Name="btnIgnitionOff" Margin="5" Background="Red" Foreground="White" IsEnabled="False"
????????????????Grid.Row="2" Grid.Column="1" Click="btnIgnitionOff_Click">Ignition OffButton>
????????<Button Name="btnForward" Margin="5" Background="LightBlue" Foreground="DarkBlue" IsEnabled="False"
????????????????Grid.Row="3" Click="btnForward_Click">ForwardButton>
????????<Button Name="btnReverse" Margin="5" Background="Orange" Foreground="OrangeRed" IsEnabled="False"
????????????????Grid.Row="3" Grid.Column="1" Click="btnReverse_Click">ReverseButton>
????????<Button Name="btnStop" Click="btnStop_Click" Background="Salmon" Foreground="Sienna" IsEnabled="True"
????????????????Grid.Row="4" Margin="5">StopButton>
???? Grid>
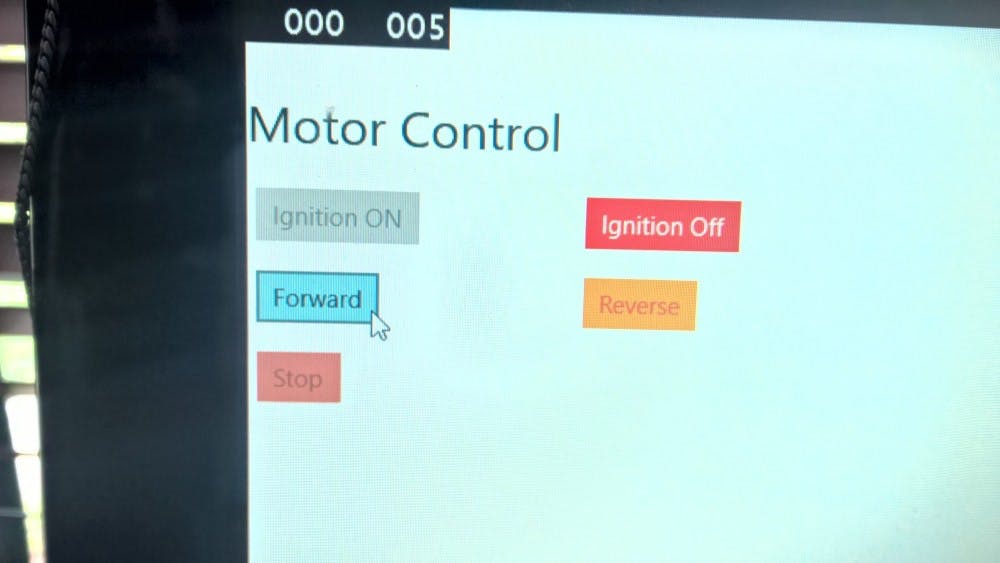
這將創建一個屏幕,其中包含一系列用于控制電機的按鈕。點火按鈕將 LD293D 電機使能引腳設置為高電平,點火關閉按鈕將其設置為低電平。還包括用于向前和向后移動電機的按鈕。停止按鈕可用于停止電機(無需關閉“點火裝置”)。
直流電機控制用戶界面
接下來,我們將用以下內容替換屏幕實現列表 (MainPage.xaml.cs):
直流電機控制實現:
using Windows.Devices.Gpio;
using Windows.UI.Xaml;
using Windows.UI.Xaml.Controls;
?
namespace PiDCMotorControl
{
????///
????/// Basic Bi-Directional Control of a single DC Motor
????///
????public sealed partial class MainPage : Page
????{
????????private int _pinEn1_2 = 21;
????????private int _pin1A = 20;
????????private int _pin2A = 16;
?
????????private GpioController _controller;
????????private GpioPin _motorEnable;
????????private GpioPin _motorControl1A;
????????private GpioPin _motorControl2A;
??????
????????public MainPage()
????????{
????????????this.InitializeComponent();
?
????????????_controller = GpioController.GetDefault();
????????????_motorEnable = _controller.OpenPin(_pinEn1_2);
????????????_motorControl1A = _controller.OpenPin(_pin1A);
????????????_motorControl2A = _controller.OpenPin(_pin2A);
????????????_motorEnable.SetDriveMode(GpioPinDriveMode.Output);
????????????_motorControl1A.SetDriveMode(GpioPinDriveMode.Output);
????????????_motorControl2A.SetDriveMode(GpioPinDriveMode.Output);????
????????}
?
????????private void _turnOnIgnition()
????????{
????????????_motorEnable.Write(GpioPinValue.High);
????????}
?
????????private void _forwardMotor()
????????{
????????????_motorControl1A.Write(GpioPinValue.High);
????????????_motorControl2A.Write(GpioPinValue.Low);
????????}
?
????????private void _reverseMotor()
????????{
????????????_motorControl1A.Write(GpioPinValue.Low);
????????????_motorControl2A.Write(GpioPinValue.High);
????????}
?
????????private void _stopMotor()
????????{
????????????_motorControl1A.Write(GpioPinValue.Low);
????????????_motorControl2A.Write(GpioPinValue.Low);
????????}
?
????????private void _turnOffIgnition()
????????{
????????????_motorEnable.Write(GpioPinValue.Low);
????????????_motorControl1A.Write(GpioPinValue.Low);
????????????_motorControl2A.Write(GpioPinValue.Low);
????????}
?
????????private void btnIgnitionOn_Click(object sender, RoutedEventArgs e)
????????{
????????????btnIgnitionOn.IsEnabled = false;
????????????btnIgnitionOff.IsEnabled = true;
????????????btnForward.IsEnabled = true;
????????????btnReverse.IsEnabled = true;
????????????_turnOnIgnition();
????????}
?
????????private void btnIgnitionOff_Click(object sender, RoutedEventArgs e)
????????{
????????????btnIgnitionOn.IsEnabled = true;
????????????btnIgnitionOff.IsEnabled = false;
????????????btnForward.IsEnabled = false;
????????????btnReverse.IsEnabled = false;
????????????_turnOffIgnition();
????????}
?
????????private void btnForward_Click(object sender, RoutedEventArgs e)
????????{
????????????btnForward.IsEnabled = false;
????????????btnReverse.IsEnabled = true;
????????????_forwardMotor();
????????}
?
????????private void btnReverse_Click(object sender, RoutedEventArgs e)
????????{
????????????btnReverse.IsEnabled = false;
????????????btnForward.IsEnabled = true;
????????????_reverseMotor();
????????}
?
????????private void btnStop_Click(object sender, RoutedEventArgs e)
????????{
????????????_stopMotor();
????????}
????}
}
當應用程序部署到樹莓派上時,您可以通過操作屏幕上的按鈕來控制電機。
- 博士直流電機控制表資料下載 4次下載
- 直流電機驅動設計
- 直流電機調速系統的仿真
- 直流電機的原理圖
- 直流電機PWM調速與控制設計報告
- 直流電機PWM控制
- 無刷直流電機運行原理與基本控制
- 直流電機控制原理及C程序
- PID控制PWM調節直流電機速度
- 直流電機PID控制
- 基于PID控制的直流電機調速系統.
- 基于PID控制的直流電機調速系統
- 直流電機的控制 36次下載
- 直流電機調速電路的設計 43次下載
- 直流電機PWM控制 52次下載
- 直流電機是什么?具有什么特點? 760次閱讀
- 直流電機的轉速與線圈的關系 1173次閱讀
- 直流電機正反轉的控制方式 5163次閱讀
- 永磁無刷直流電機的控制方法 1494次閱讀
- 直流電機控制器電路圖分享 8432次閱讀
- 如何使用L298N和Arduino板控制直流電機 1w次閱讀
- 直流電機控制器原理圖 2.8w次閱讀
- 什么是無刷直流電機(BLDC)以及它的應用 5.2w次閱讀
- 解析什么是無刷直流電機(BLDC) 2.3w次閱讀
- 淺析直流電機PWM控制原理及應用 2w次閱讀
- 基于直流電機H橋的驅動和控制原理設計并實現一款較大功率的直流電機 2.4w次閱讀
- 直流電機的電勢平衡方程與直流電機的損耗和功率平衡方程 1.1w次閱讀
- 直流電機的基本構成與直流電機驅動電路的設計圖解 1.7w次閱讀
- 直流電機的主要分類以及直流電機的勵磁方式 1.5w次閱讀
- 直流電機幾種驅動電路設計思路 10.8w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論