 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹
“我——大人,這——不可能找到那艘船。這不在我們的范圍內。” – 努特槍雷
我們最近搬進了新房子,一如既往,首先要解決的問題是在車庫中找到最佳的停車位。理想情況下,我們希望將汽車停在盡可能靠近車庫門的地方,從而在汽車前部和車庫后墻之間留出最大的自由空間。
我和一些朋友討論了各種解決方案,普遍認為舊的“繩子上的球”技術是解決這個問題的首選方法。對于那些沒有見過這種古老做法的人來說,它涉及用一根懸掛在車庫天花板上的繩子懸掛一個網球。一旦汽車被移動到最佳位置,繩子的長度就會永久調整,使網球剛好接觸到汽車的前擋風玻璃。因此,無論何時您開車進入車庫,只要網球碰到擋風玻璃,您就可以停下來。確實古風……
那根本不行。我心想,“自我,我們需要用小工具來解決這個問題。” 我們不能讓網球掛在繩子上,破壞車庫的原始秩序。
我決定使用超聲波換能器,它基本上是一種基于聲音的測距儀。我最初考慮的是激光/光源,但研究讓我相信這對近距離的汽車來說可能會有一些麻煩。不過對我來說幸運的是,基于聲音的超聲波換能器可以解決問題。
為了節省時間,因為我需要快速組裝設備,所以我選擇了一個預制的超聲波換能器電路,而不是自己構建一個。我可能會在某天為練習構建自己的,但最近時間有點短。
第1部分
電路相當簡單,它有一個+5V 引腳、一個接地引腳和一個信號引腳。您只需在信號引腳上生成一個脈沖,然后測量返回脈沖的脈沖寬度即可確定距離。這個設備顯然適用于 2cm 到 3m 的范圍,這很好地滿足了我的需要。
我決定將范圍顯示為一系列超亮 LED。我在電路中內置了 6 個 LED,5 個紅色和 1 個綠色,排列為 Red Red Red Red Green Red。我本可以使用多色 LED 來做到這一點,但我更喜歡這種方法。
這就是 LED 響應汽車范圍的方式,隨著汽車越來越近,更多的紅燈亮起。一旦汽車處于最佳范圍內,紅燈熄滅,綠燈亮起。如果汽車開得太遠(離墻太近),則綠燈熄滅,最后的紅燈亮起。
_ _ _ _ _ _ = Car greater than 3m from wall.
r _ _ _ _ _ = Car 3m from wall.
r r _ _ _ _ = Car 2m from wall.
r r r _ _ _ = Car 1.5m from wall.
r r r r _ _ = Car 1m from wall.
_ _ _ _ g _ = Car 45cm from wall.
_ _ _ _ _ r = Car 35cm from wall.
這是我構建的電路。
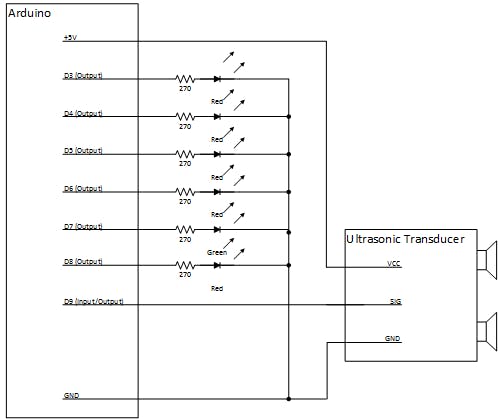
我使用標準的 Arduino Uno Rev 3 開發板,因為我不需要網絡功能。
第2部分
這是基本的控制代碼。我使代碼保持簡單,以僅解決此功能所需的邏輯。我構建的實際設備使用 RF 接收器從我的車庫門控制器電路中獲取車庫門狀態消息。我這樣做是為了在車庫門關閉時關閉測距儀電路,然后在車庫門打開時打開電路。
/***************************************************************/
/* */
/* Garage Controller Range v2.0 */
/* */
/***************************************************************/
#include
#define SF(x) String(F(x))
#define CF(x) String(F(x)).c_str()
#define RANGE_MIN 35
#define RANGE_MAX 39
#define RANGE_1 49
#define RANGE_2 64
#define RANGE_3 84
#define RANGE_4 200
int iPinRed1 = 3;
int iPinRed2 = 4;
int iPinRed3 = 5;
int iPinRed4 = 6;
int iPinGreen1 = 7;
int iPinRed5 = 8;
int iPinRange = 9;
/***************************************************************/
/* Function: setup */
/***************************************************************/
void setup()
{
Serial.begin(9600);
Serial.println(SF("setup()"));
pinMode(iPinRed1, OUTPUT);
pinMode(iPinRed2, OUTPUT);
pinMode(iPinRed3, OUTPUT);
pinMode(iPinRed4, OUTPUT);
pinMode(iPinGreen1, OUTPUT);
pinMode(iPinRed5, OUTPUT);
pinMode(iPinRange, OUTPUT);
}
/***************************************************************/
/* Function: loop */
/***************************************************************/
void loop()
{
long lDuration = 0, lCM = 0;
// 2 Microsecond Clear + 5 Microsecond Pulse
pinMode(iPinRange, OUTPUT);
digitalWrite(iPinRange, LOW);
delayMicroseconds(2);
digitalWrite(iPinRange, HIGH);
delayMicroseconds(5);
digitalWrite(iPinRange, LOW);
// Get Return Pulse
pinMode(iPinRange, INPUT);
lDuration = pulseIn(iPinRange, HIGH);
lCM = ConvertMSToCM(lDuration);
Serial.println("Distance: " + String(lCM) + " cm");
// Too Close
if (lCM < RANGE_MIN)
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, HIGH);
}
// Perfect
else if (lCM >= RANGE_MIN & lCM < RANGE_MAX)
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, HIGH);
digitalWrite(iPinRed5, LOW);
}
// Range 1
else if (lCM >= RANGE_MAX & lCM < RANGE_1)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, HIGH);
digitalWrite(iPinRed3, HIGH);
digitalWrite(iPinRed4, HIGH);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 2
else if (lCM >= RANGE_1 & lCM < RANGE_2)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, HIGH);
digitalWrite(iPinRed3, HIGH);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 3
else if (lCM >= RANGE_2 & lCM < RANGE_3)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, HIGH);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 4
else if (lCM >= RANGE_3 & lCM < RANGE_4)
{
digitalWrite(iPinRed1, HIGH);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
// Range 5
else if (lCM >= RANGE_4)
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
else
{
digitalWrite(iPinRed1, LOW);
digitalWrite(iPinRed2, LOW);
digitalWrite(iPinRed3, LOW);
digitalWrite(iPinRed4, LOW);
digitalWrite(iPinGreen1, LOW);
digitalWrite(iPinRed5, LOW);
}
delay(50);
}
/***************************************************************/
/* Function: ConvertMSToCM */
/***************************************************************/
long ConvertMSToCM(long lMicroSeconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled. - Arduino Site
return lMicroSeconds / 29 / 2;
}
上面的代碼有一個問題。雖然它有效,但我們假設汽車停在離墻 34.5 厘米的地方。測距儀可以在將汽車位置記錄為 34 厘米和 35 厘米之間擺動。這意味著您會看到 LED 在綠色(完美)和紅色(太接近)之間波動。有幾種方法可以解決這個問題,但其中之一是不使用單個閾值在狀態之間切換。在上面的示例中,RANGE_MIN (35cm) 用作“太靠近墻壁”狀態和“完美范圍”狀態之間的閾值。
第 3 部分
我們可以做的是創建兩個閾值。當范圍減小時使用一次閾值,當范圍增加時使用一個閾值。因此當小車距離墻壁34cm時,狀態變為“太近”,但直到距離超過36cm時才會變回“perfect”。這樣,如果范圍恰好在閾值上,它將保持在其中一種狀態,直到范圍發生顯著變化足以將其移回下一個狀態。如果您需要示例,請告訴我,我可以為此添加一個代碼片段。
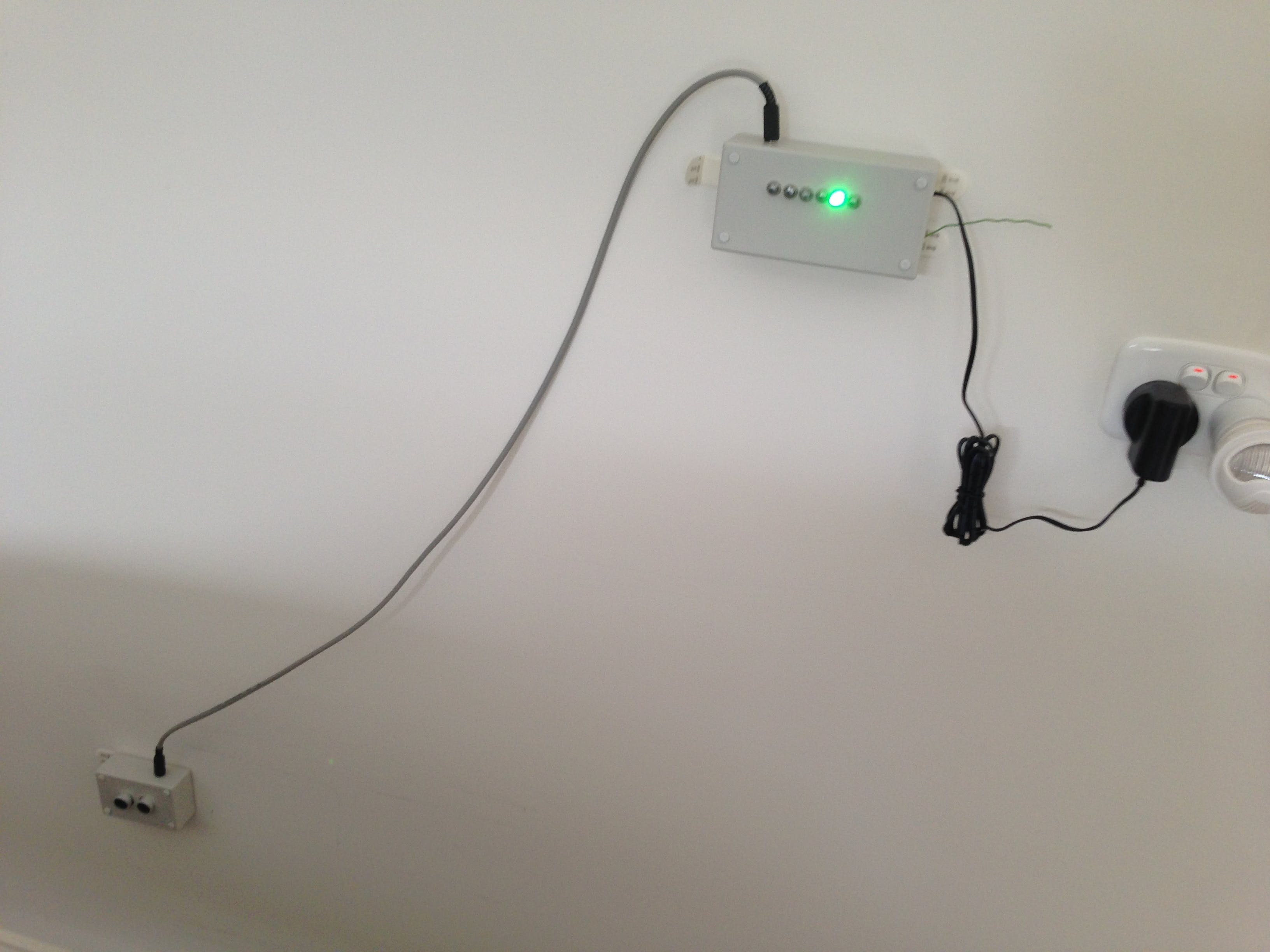
最后一個要解決的問題是組裝。對我來說,我需要將測距儀放在車牌/保險杠的高度。然而,我希望燈在墻上更高,這樣司機就可以看到它們。我決定將測距儀電路放在一個組件中,而將 Arduino/燈放在另一個組件中。然后我為每個組件添加了一個插座,并在它們之間連接了一根電纜來完成電路。事后看來,我應該把 Arduino 組件的插座放在組件的底部,但是你能做什么……
我用您可以買到的 3M 掛鉤上的膠帶將它們都固定在墻上。您還可以看到從一側伸出的一條綠色小線——這是用于接收車庫門狀態的天線。我在這篇博文中介紹了用于 RF 通信的電路。
第 4 部分
根據用例,您可以使用此電路做更多的事情。可以添加多個測距儀,這樣您就可以用傳感器覆蓋兩個(或更多)汽車點。您可以在更高的位置添加第二個傳感器,這樣如果您將它用于多輛汽車,您可以通過檢測兩個傳感器之間的距離差異(為您提供汽車的形狀)來檢測哪輛汽車(以及首選范圍)。如果你真的很熱衷,你也可以用它把你的車停在正確的地方,但這需要建造第二個稍微復雜一點的電路……
?邁克
- Arduino指紋傳感器教程分享
- 車輛停車傳感器開源設計
- DIY停車雷達傳感器
- 使用Arduino制作停車傳感器
- 停車傳感器助手開源分享
- 帶有Arduino的停車傳感器
- 灰塵傳感器作為輸入到Arduino兼容板的輸入開源
- 基于stm32智能立體停車庫項目
- arduino loar_Arduino動手做(6)聲音傳感器模塊
- PH 傳感器說明書FOR Arduino 2.0免費下載 6次下載
- arduino聲音傳感器 模擬資料匯總 2次下載
- 可兼容Arduino的聲音傳感器模塊LM386 6次下載
- Arduino雨滴傳感器的使用示例代碼免費下載 43次下載
- 基于WinCE的立體停車庫管理系統的設計
- 汽車庫、修車庫、停車場設計防火規范 GB 50067-97
- 基于機智云的智能私家車庫控制系統設計與實現 533次閱讀
- 傳感器的定義和分類 1506次閱讀
- 基于紅外傳感器的停車場警衛電路圖 2325次閱讀
- 工業級智能停車系統設計方案 924次閱讀
- 采用數字微波傳感器和Arduino控制板實現人體探測系統 2202次閱讀
- 采用數字微波傳感器、繼電器和Arduino控制板的自動光控系統 969次閱讀
- 如何使用Arduino和LDR傳感器實現LCD液晶屏亮度的自動調節 7185次閱讀
- 如何使用Arduino創建停車門禁控制系統? 5302次閱讀
- 采用PLC和Profibus現場總線實現立體停車庫控制系統的設計 7419次閱讀
- 聲控傳感器構成的防盜監聽電路 3322次閱讀
- dfrobot模擬灰度傳感器簡介 3320次閱讀
- 德州儀器推出針對入口系統的毫米波傳感器驅動解決方案 1022次閱讀
- 數字傳感器和模擬傳感器的區別 2.5w次閱讀
- 基于無線傳感器網絡在停車場監控系統中的應用 1548次閱讀
- 西門子Simatic S7-200 Smart PLC,讓智能車庫停車,不再難 4039次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論