 電子發燒友App
電子發燒友App


1 引言
網絡化控制系統是控制系統的發展趨勢和研究熱點,現場總線控制系統作為網絡化系統的重要組成部分,近年來在實際的控制系統中得到了廣泛的應用。CAN(Con- troller Area Network)總線作為一種容錯性強、可靠性高、布線簡單且成本低廉的現場總線倍受用戶欽睞,在國內CAN總線已經得到了廣泛應用。目前國內廣泛應用的獨立CAN控制器SJA1000因存在如地址、數據總線的分時復用常導致接口效率低下;接收、發送緩沖區的個數太少,導致數據吞吐率不高;幀屏蔽和過濾器的設置不夠靈活,不能滿足同時需要更多屏蔽和過濾條件的要求等。
ARM芯片S3C2410是一種高集成度,高性價比的嵌入式處理芯片,已成功用于工控設備上。然而其美中不足的是沒有集成CAN控制器,使其在工控產品中的應用中受到了一定的阻礙。為了解決這一問題,同時考慮到盡可能降低硬件電路的復雜性,保證CAN總線通訊的穩定性和效率,采用帶SPI接口的獨立CAN控制器MCP2515來給S3C2410擴展CAN接口。下面以自行開發的人機界面(HMI,Human Machine Interface)中CAN總線通訊接口設計為例進行說明。
2 CAN總線接口硬件設計
下面先簡要介紹相關控制器芯片,后對CAN接口硬件設計作詳細說明。
2.1 ARM芯片S3C2410和CAN控制器MCP2515簡介
S3C2410是三星公司設計的32位RISC嵌入式處理器。該芯片基于ARM920T內核,采用五級流水線和哈佛結構,提供1.1MIPS/MHz的性能。為了減少應用系統設計的成本,S3C2410集成了眾多的常用資源,如:LCD控制器、SDRAM控制器、一個觸摸屏接口、兩個SPI接口等,內核最高工作頻率可達266MHz。
獨立CAN控制器MCP2515靈活的中斷能力、接收幀屏蔽和過濾、幀優先級設定等特性使其能夠很好的對信息進行管理,減輕了處理器的負擔和軟件設計的復雜度。其獨特功能如下:
(1) 有標準幀和擴展幀兩種數據幀可供選擇,每個幀的數據字段長度可為0-8字節,標準幀數據段的前兩個字節可單獨過濾;
(2) 內含3個發送緩沖器和2個接收緩沖器,并且其優先級可編程設定;
(3) 內含6個29字節的接收過濾器和2個29字節的接收屏蔽器;
(4) 具有Loop-Back(自環檢測)模式;支持更高層的協議,如DeviceNet、SAEJ1939;
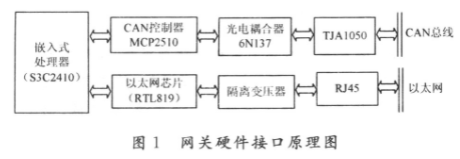
2.2 硬件接口設計
S3C2410的SPI接口兼容SPI V2.11協議,可支持查詢、中斷和DMA三種數據傳送模式。MCP2515連接到S3C2410的SPI0口,其相互連接關系如圖1所示。
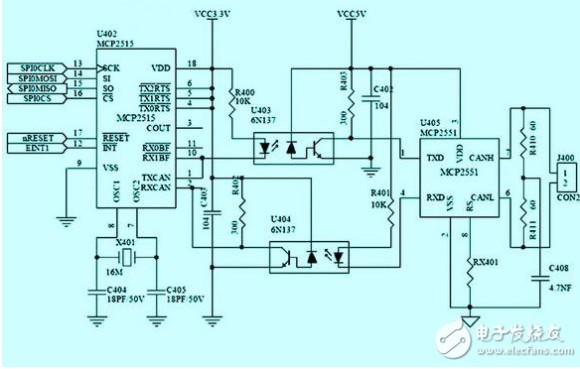
圖1 PROFIBUS 網絡特性
(1) 本接口設計不使用TXnRTS、RXnBF等5個引腳,使用了總中斷引腳INT,因此在軟件設計的時候不使能發送請求和接收完畢中斷對應功能引腳,且在本設計中該引腳也不作其它用途,處理器在響應總中斷后,通過SPI接口訪問MCP2515內部相應寄存器來確定具體的中斷事件,并對其作出處理。
(2) 為了隔離總線上的干擾信號,提高系統的可靠性,CAN控制器與CAN收發器之間采用了光隔。光隔的兩邊應該采用獨立的供電電源,不可與系統的其他部分直接共地。
(3) 在CANH和CANL之間使用了兩個等值電阻(R410、R411)和旁路電容(C408)來提高EME(Electro Magnatic Emission)性能,減少該部分對系統其他部分的干擾。
(4) MCP2515在初始上電、復位以及從休眠模式喚醒后最初的128 OSC時鐘周期內,OST(振蕩啟動定時器)保持復位狀態。應注意在OST超時前不應對SPI進行操作。
(5) RX是為減少EMI(Electro Magnatic Interference)而設計的。CANH、CANL的轉換率與RX上流經的電流成正比。
3 CAN總線接口軟件設計
CAN總線軟件接口為應用層訪問CAN控制器—MCP2515提供了一個便捷的“通道”,該“通道”屏蔽了CAN控制器工作的實現細節,使得應用層面向通信是透明的。該接口通過SPI接口通信來實現對CAN控制器的操作。它們之間的相互關系如圖2所示。
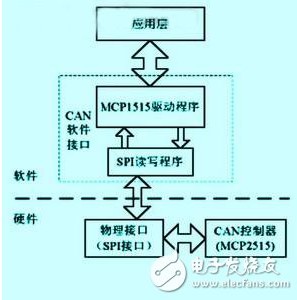
圖2 濾池就地控制單元硬件結構圖
3.1 CAN接口軟件實現
S3C2410的SPI可以工作在四種模式,但是MCP2515的SPI接口只支持其中的兩種。因此應該將S3C2410的SPI接口配置為MCP2515支持的模式工作。從圖1中可以看出S3C2410的SPI應該配置為正常模式的中斷方式,具體配置操作請見參考文獻[2]。
S3C2410-SPI的單個字節讀、寫函數實現如下:
unsigned char ReadSPI( void )
{
SPRDAT0 = 0x00; // 初始化SPI總線
while ( !REDY );
// 判斷接收數據是否完成
return ( SPRDAT0 );
// 獲取接收到的數據
}
unsigned char WriteSPI( unsigned char data )
{
SPRDAT0 = data; // 寫數據到發送緩沖區
if ( DCOL ) return ( -1 );
// 判斷是否發生沖突,發生沖突則返回錯誤標準
else while( !REDY );
// 否則等待數據發送完成
return ( 0 ); // 返回發送成功標準
}
對MCP2515的讀寫函數原型如下:
void Mcp_Read( unsigned char Addr, unsigned char *ReadData, unsigned char Length );
void Mcp_Write( unsigned char Addr, unsigned char *WriteData, unsigned char Length );
Addr:要讀寫區域的首地址;
ReadData/WriteData:讀取數據存放區、寫出數據緩沖區首地址;
Length:要讀、寫數據的字節數。
其它對MCP2515的操作在此不一一列舉,請見參考文獻[3]。
3.2 CAN總線數據收發軟件設計
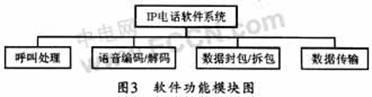
本設計采用外部中斷1響應MCP2515的總中斷,并且配置控制器始終處于喚醒模式,發送器工作在正常模式,使能接收、發送、錯誤中斷。中斷方式處理CAN總線數據收發的流程如圖3,分別從發送處理、接收處理、錯誤處理三個部分加以說明。
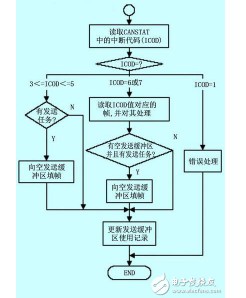
圖3 中斷方式實現CAN總線數據收發流程圖
(1) 發送處理
在兩種情況會下被執行,其一發送中斷響應中,如果當前有發送任務,通過發送緩沖區記錄標志確定空的發生緩沖區并向其中填發送幀,然后啟動發送;其二在接收中斷響應中,在接收處理完后如果有發送任務且有發送緩沖區空,會處理發送任務。在兩處處理發送主要是考慮有多個發送、接收緩沖區可用,可以提高通信效率。
(2) 接收處理
需要根據ICOD的值來確定當前是那個接收緩沖區的數據準備好,可以讀取。接收幀處理過程中首先讀取幀的ID值,確定當前幀的數據是那個節點發送來的,并據此把幀中數據字段的數據存放相應的位置。
(3) 錯誤處理
引起錯誤處理的原因很多,并且都產生錯誤中斷,需要訪問錯誤標志寄存器來確定具體錯誤類型,并據此作相應的處理。
此外,圖3中更新發送緩沖區使用記錄是為了在發送和接收中斷響應中可以據此清楚發送緩沖區的使用情況,確定當前是否可以做發送處理。
4 測試與應用
將以上設計方案應用到自主開發的HMI(結構框圖如圖4,虛線框中為擴展的CAN總線接口框圖)實驗板上,同時與黃石市科威自控有限公司開發的混合型PLC(EASY-M0808R-A44NB)、通用型PLC(EASY-M2416R)、運動控制器(EASY-KP3-M0506R)進行通信測試,其中HMI作主站,其他設備作從站。測試環境中有電機頻繁啟停和不間斷繼電器開閉干擾,其他測試條件和參數見如附表:
附表 CAN接口測試記錄表

在測試記錄程序中記錄了通訊速率為500Kbps,運行到6時31分42秒時出現了一次通信“死機”,隨后系統調用自恢復程序重新配置軟硬件參數,6時31分43秒重啟通信,通信恢復正常。其他測試條件下沒有出現“死機”的情況。該測試結果說明采用這種方法設計的CAN接口完全能夠滿足工業現場網絡通訊的要求。
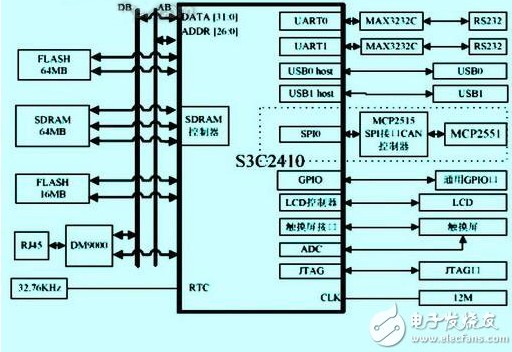
圖4 HMI系統結構圖
5 結束語
采用ARM芯片S3C2410集成的SPI接口擴展的CAN總線接口,在不改變CAN總線自身的特點的前提下,使得PCB布線簡單,增強了系統的可靠性;為擴展接口找到了一個便捷的方法。在自主開發的HMI中采用該設計方案實現CAN總線接口的擴展,并且在實際應用和測試中證明了該方案的正確性和可靠性。











 工商網監
工商網監
評論