60年代起,旋轉變壓器逐漸用于伺服系統,作為角度信號的產生和檢測元件。三線的三相的自整角機,早于四線的兩相旋轉變壓器應用于系統中。隨著電子技術和數字計算技術的發展,數字式計算機代替了模擬式計算機。
這些年來,隨著工業自動化水平的提高,隨著節能減排的要求越來越高,效率高、節能顯著的永磁交流電動機的應用,越來越廣泛。而永磁交流電動機的位置傳感器,原來是以光學編碼器居多,但這些年來,卻迅速地被旋轉變壓器代替。可以舉幾個明顯的例子,在家電中,不論是冰箱、空調、還是洗衣機,目前都是向變頻變速發展,采用的是正弦波控制的永磁交流電動機。目前各國都在非常重視的電動汽車中,電動汽車中所用的位置、速度傳感器都是旋轉變壓器。例如,驅動用電動機和發電機的位置傳感、電動助力方向盤電機的位置速度傳感、燃氣閥角度測量、真空室傳送器角度位置測量等等,都是采用旋轉變壓器。
在應用于塑壓系統、紡織系統、冶金系統以及其他領域里,所應用的伺服系統中關鍵部件伺服電動機上,也是用旋轉變壓器作為位置速度傳感器。?
旋轉變壓器的應用已經成為一種趨勢。?
旋轉變壓器又稱分解器,是一種控制用的微電機,它將機械轉角變換成與該轉角呈某一函數關系的電信號的一種間接測量裝置。?在結構上與二相線繞式異步電動機相似,由定子和轉子組成。定子繞組為變壓器的原邊,轉子繞組為變壓器的副邊。激磁電壓接到轉子繞組上,感應電動勢由定子繞組輸出。常用的激磁頻率為400Hz,500Hz,1000Hz和5000Hz。
旋轉變壓器結構簡單,動作靈敏,對環境無特殊要求,維護方便,輸出信號幅度大,抗干擾性強,工作可靠。因此,在數控機床上廣泛應用。??
通常應用的旋轉變壓器為二極旋轉變壓器,其定子和轉子繞組中各有互相垂直的兩個繞組。另外,還有一種多極旋轉變壓器。也可以把一個極對數少的和一個極對數多的兩種旋轉變壓器做在一個磁路上,裝在一個機殼內,構成“粗測”和“精測”電氣變速雙通道檢測裝置,用于高精度檢測系統和同步系統。??
目前,旋轉變壓器主要是用于角度位置伺服控制系統中。由于兩相的旋轉變壓器比自整角機更容易提高精度,所以旋轉變壓器應用的更廣泛。
旋轉變壓器的應用,發展很快。除了傳統的、要求可靠性高的軍用、航空航天領域之外,在工業、交通以及民用領域也得到了廣泛的應用。
特別應該提出的是,這些年來,隨著工業自動化水平的提高,隨著節能減排的要求越來越高,效率高、節能顯著的永磁交流電動機的應用,越來越廣泛。
而永磁交流電動機的位置傳感器,原來是以光學編碼器居多,但這些年來,卻迅速地被旋轉變壓器代替。
目前各國都在非常重視的電動汽車中,電動汽車中所用的位置、速度傳感器都是旋轉變壓器。在應用于塑壓系統、紡織系統、冶金系統以及其他領域里,所應用的伺服系統中關鍵部件伺服電動機上,也是用旋轉變壓器作為位置速度傳感器。
旋轉變壓器傳感器的工業應用
一些絕對旋轉傳感技術(如光編碼器)被多次選用于工業應用。然而, 當應付惡劣環境或出于低成本考慮時,旋轉變壓器是理想的選擇。
伺服電機常用于工業領域,與旋轉變壓器以及其他類型的位置傳感器相連接。通常使用伺服電機和伺服驅動器與旋轉變壓器配合來實現角速度與位置測量的應用包括:
·數控(CNC)和注塑機
·升降機
·機械手臂
·電動交通工具(電動自行車、電動滑板車、電動輪椅等)
·鐵路運輸
·農業和建筑設備
·公共汽車和重型卡車
·高爾夫球車和低速電動車
主要的旋轉變壓器傳感系統要求
精確和及時的旋轉變壓器角度輸出
在找到利用旋轉變壓器來減輕電磁干擾對工業系統的影響的方法之前,重要的是要先理解為什么精確的位置控制是必不可少的。
旋轉變壓器提供一個理論上與無限解析度一樣的模擬輸出。模擬到數字的轉換技術,通過將輸出分割成塊或步驟的程度來限制解析度。對持續角進行有限分割將導致定量錯誤。
例如,您可以使用一個12位分辨率的轉換器來提供角輸出。轉換器軸旋轉一圈被分為4096步(2^12對應一個12位分辨率)。由于一度等于60分,所以旋轉一圈(360度)等于21600角分(60x360)。則每步的間隔為5.27角分(21600/4096)。系統不可能提供比5.27角分更好的信息。
決定正確角位置的兩個關鍵點是系統精度和系統穩定時間。后者主要指的是角輸出要花多久才能顯示出精確位置。需要對系統的每個部件進行評價,以確定限制因素。系統中,典型的誤差精度是旋轉變壓器誤差和旋轉變壓器模擬數字轉換(RDC’s)誤差的總和。
最常見的是,3-10角分就會出現一個旋轉變壓器誤差。再加上5.27角分會出現旋轉變壓器模擬數字轉換誤差,則我們可以得出精確的誤差出現范圍是8.27-15.27角分。因此,選擇正確的RDC很重要。
以下因素在典型的旋轉變壓器應用中會對系統精度和穩定時間產生影響 :
一、機械因素
·傳感器的結構(零位電壓、變壓比等)
·傳感器規格隨溫度的變化
·線圈不平衡:正弦和余弦線圈輸出電壓可能會不平衡,從而導致誤差
·旋轉變壓器傳感器未對準:旋轉變壓器也許安裝錯誤,導致系統靜態誤差
·旋轉變壓器傳感器的極的數量:由于每增加一對極就會多檢測360度,因此增加的極數會降低角誤差
二、電氣因素
·旋轉變壓器模擬-數字轉換結構
·旋轉變壓器信號輸入到角輸出的時間延遲,反應快速的角變化穩定時間
·模擬前端(AFE)部件的不平衡
·系統具備處理環境因素的能力(例如,外部磁場或共模噪音)
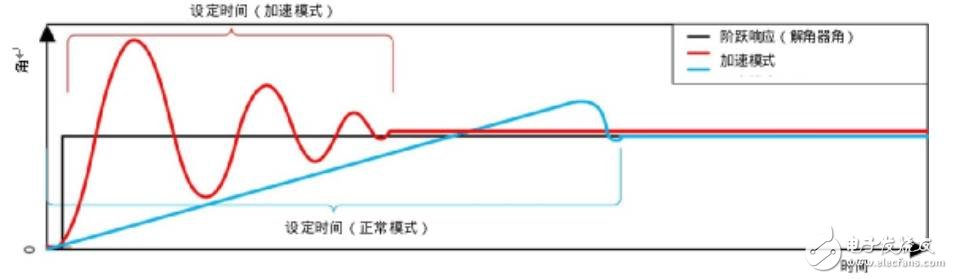
三、穩定時間
當旋轉變壓器的電機位置或輸出信號變化迅速時,穩定時間是RDC控制系統的快速性能指標。圖1顯示的一個是有階躍輸入變化(黑線)的RDC反饋控制系統的穩定時間的例子。藍色信號顯示的是對電路的正常模式響應,紅色信號顯示的是加速模式過程中響應(角快速變化)。為了在快速變化的條件下追蹤到旋轉角,加速模式幫助控制回路很容易跟蹤到一個快速的旋轉角。
四、EMC/EMI影響旋轉變壓器系統
電磁兼容性(EMC)指的是:電子系統要怎樣在電磁環境中運行而不產生問題(免疫力)。同樣地,系統發射脈沖一定不能干擾到范圍中的任何產品。在工業設備應用中,變速驅動器和控制電路是主要干擾源。功率元件的快速切換,例如絕緣柵雙極型晶體管(IGBT)和微控制器,是高頻發射或干擾的主要來源。IGBT切換時間可長達100nS。
電氣設備應該不受高頻現象影響,例如:
1.靜電放電(ESD)
2.快速瞬變(也稱為EFT)
3.輻射電磁場
4.傳導射頻干擾
5.浪涌脈沖
旋轉變壓器在混合動力汽車中的應用
世界各國環境保護措施越來越嚴格,用環保型汽車替代普通燃油發動機汽車將成為今后汽車發展的主流,目前已經出現的環保汽車有:太陽能汽車、氫能源汽車、燃料電池汽車、混合動力汽車等等。但是在這些車型中, 目前只有混合動力汽車真正具有實用推廣價值。
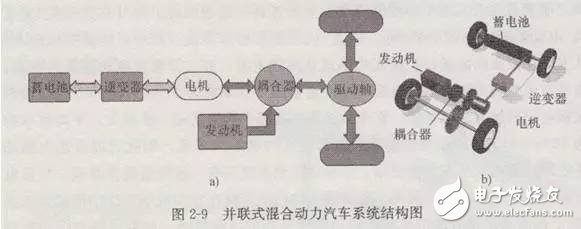
混合動力汽車的動力系統以動力傳輸路線分類,可分為串聯式、并聯式和混聯式等三種。
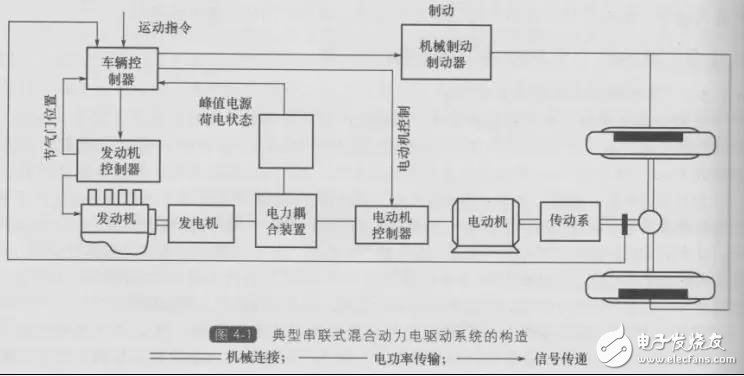
不管采用何種方式,在電動機參與傳動時都需要速度反饋,控制器接收到速度反饋信號后控制電動機驅動機構將車速穩定在目標速度, 也可以根據速度選擇傳動方式。
常用的速度反饋元件有旋轉編碼器,霍爾速度傳感器、旋轉變壓器(簡稱旋變)。從功能上來講,三者都能完成速度反饋的功能,但是編碼器由于碼盤防護等級不高,容易震壞,雖然有較高的分辨率,但是維修頻率高,從而影響整臺車質量可靠性;霍爾速度傳感器價格便宜、 但是分辨率低,使得控制精度受到限制, 而且霍爾元件長時間受熱后磁性會減弱,所以使用壽命不長;
旋轉變壓器由于轉子和定子分離,無接觸,而且采用無刷設計,所以有很高的防護等級,能耐高強度的震動,不怕水和油污,使用壽命可以長達數十年,另外采用專用的轉換芯片解碼,可以將旋變輸出的模擬信號轉換為數字信號,有和旋轉編碼器相當的解碼精度。因此,做為混合動力汽車的速度反饋元件,旋變可以說一種比較理想的選擇。
混合動力汽車由電動機驅動時必須檢測電動機的轉速,應用旋變時需要將其轉子安裝在馬達軸上檢測其速度,當然也可以通過其他耦合方式檢測。
安裝在電機內部時,由于馬達內部的磁場會影響旋變本身的磁通量變化率,從而影響其解碼精度,因此必須加裝屏蔽罩。并且在旋變的輸出線上套上屏蔽線,降低空間電磁干擾。
采用這種安裝方法將使旋變得到很好的保護,不會受到灰塵、油污等的影響, 因此旋變使用壽命長,故障率低, 是一種理想的使用方法。
旋變的輸出信號是連續變化的模擬信號,用戶一般不能直接使用,需轉換為方波信號方可。
針對自己生產的旋變,我司已經推出了完整的解碼板,可以支持多款旋變。解析度為1024C/T。
電動汽車用旋轉變壓器特征
1、超薄尺寸:作為內置型結構,實現了超薄設計和裝配。
2、允許工作溫度范圍:-55℃~+155℃
3、防護等級高:耐震動和沖擊
4、高旋轉速度:最高可以達到60000 RPM
5、高可靠性:由于采用了和馬達相似的結構,但是由于轉子無繞線,因此具有很高的可靠性。
6、低成本:通過減少元件數目大幅度的降低了旋變的成本
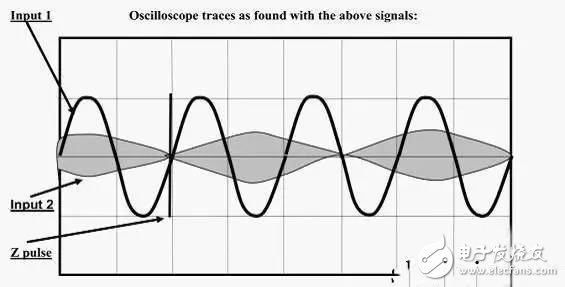
旋轉變壓器與伺服電機電角度相位的對齊方法
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出;
2.然后用示波器觀察旋變的SIN線圈的信號引線輸出;
3.依據操作的方便程度,調整電機軸上的旋變轉子與電機軸的相對位置,或者旋變定子與電機外殼的相對位置;
4.一邊調整,一邊觀察旋變SIN信號的包絡,一直調整到信號包絡的幅值完全歸零,鎖定旋變;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,信號包絡的幅值過零點都能準確復現,則對齊有效 。
撤掉直流電源,進行對齊驗證:
1.用示波器觀察旋變的SIN信號和電機的UV線反電勢波形;
2.轉動電機軸,驗證旋變的SIN信號包絡過零點與電機的UV線反電勢波形由低到高的過零點重合。
這個驗證方法,也可以用作對齊方法。
此時SIN信號包絡的過零點與電機電角度相位的-30度點對齊。如果想直接和電機電角度的0度點對齊,可以考慮:
1.用3個阻值相等的電阻接成星型,然后將星型連接的3個電阻分別接入電機的UVW三相繞組引線;
2.以示波器觀察電機U相輸入與星型電阻的中點,就可以近似得到電機的U相反電勢波形;
3.依據操作的方便程度,調整編碼器轉軸與電機軸的相對位置,或者編碼器外殼與電機外殼的相對位置;
4.一邊調整,一邊觀察旋變的SIN信號包絡的過零點和電機U相反電勢波形由低到高的過零點,最終使這2個過零點重合,鎖定編碼器與電機的相對位置關系,完成對齊。
需要指出的是,在上述操作中需有效區分旋變的SIN包絡信號中的正半周和負半周。由于SIN信號是以轉定子之間的角度為θ的sinθ值對激勵信號的調制結果,因而與sinθ的正半周對應的SIN信號包絡中,被調制的激勵信號與原始激勵信號同相,而與sinθ的負半周對應的SIN信號包絡中,被調制的激勵信號與原始激勵信號反相,據此可以區別判斷旋變輸出的SIN包絡信號波形中的正半周和負半周,對齊時,需要取sinθ由負半周向正半周過渡點對應的SIN包絡信號的過零點,如果取反了,或者未加準確判斷的話,對齊后的電角度有可能錯位180度,從而有可能造成速度外環進入正反饋。
如果可接入旋變的伺服驅動器能夠為用戶提供從旋變信號中獲取的與電機電角度相關的絕對位置信息,則可以考慮:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.利用伺服驅動器讀取并顯示從旋變信號中獲取的與電機電角度相關的絕對位置信息;
3.依據操作的方便程度,調整旋變軸與電機軸的相對位置,或者旋變外殼與電機外殼的相對位置;
4.經過上述調整,使顯示的絕對位置值充分接近根據電機的極對數折算出來的電機-30度電角度所應對應的絕對位置點,鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,上述折算絕對位置點都能準確復現,則對齊有效。
此后可以在撤掉直流電源后,得到與前面基本相同的對齊驗證效果:
1.用示波器觀察旋變的SIN信號和電機的UV線反電勢波形;
2.轉動電機軸,驗證旋變的SIN信號包絡過零點與電機的UV線反電勢波形由低到高的過零點重合。
如果利用驅動器內部的EEPROM等非易失性存儲器,也可以存儲旋變隨機安裝在電機軸上后實測的相位,具體方法如下:
1.將旋變隨機安裝在電機上,即固結旋變轉軸與電機軸,以及旋變外殼與電機外殼;
2.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
3.用伺服驅動器讀取由旋變解析出來的與電角度相關的絕對位置值,并存入驅動器內部記錄電機電角度初始安裝相位的EEPROM等非易失性存儲器中;
4.對齊過程結束。
由于此時電機軸已定向于電角度相位的-30度方向,因此存入的驅動器內部EEPROM等非易失性存儲器中的位置檢測值就對應電機電角度的-30度相位。此后,驅動器將任意時刻由旋變解析出來的與電角度相關的絕對位置值與這個存儲值做差,并根據電機極對數進行必要的換算,再加上-30度,就可以得到該時刻的電機電角度相位。
這種對齊方式需要伺服驅動器的在國內和操作上予以支持和配合方能實現,而且由于記錄電機電角度初始相位的EEPROM等非易失性存儲器位于伺服驅動器中,因此一旦對齊后,電機就和驅動器事實上綁定了,如果需要更換電機、旋變、或者驅動器,都需要重新進行初始安裝相位的對齊操作,并重新綁定電機和驅動器的配套關系。