01? ?說在前面的話?
在《MEMS 慣性傳感器 04 - 坐標系定義》這篇文章的基礎之上,針對導航坐標系和載體坐標系進行進一步的介紹。
導航坐標系和載體坐標之間的相互轉換是工程應用中經常遇到的問題。
02?
坐標系定義?
導航坐標系(也稱為:當地水平坐標系、地理坐標系)分為:東北天坐標系(ENU)和 北東地坐標系(NED) ? 載體坐標系分為:前右下 和 左前上 要特別注意的:慣導坐標系的定義,關系到后續的旋轉矩陣和旋轉順序。當確定一個導航坐標系后,那么對應的歐拉角、歐拉旋轉順序、和對應的載體坐標都與之對應確定。
[東北天坐標系]-[右前上]
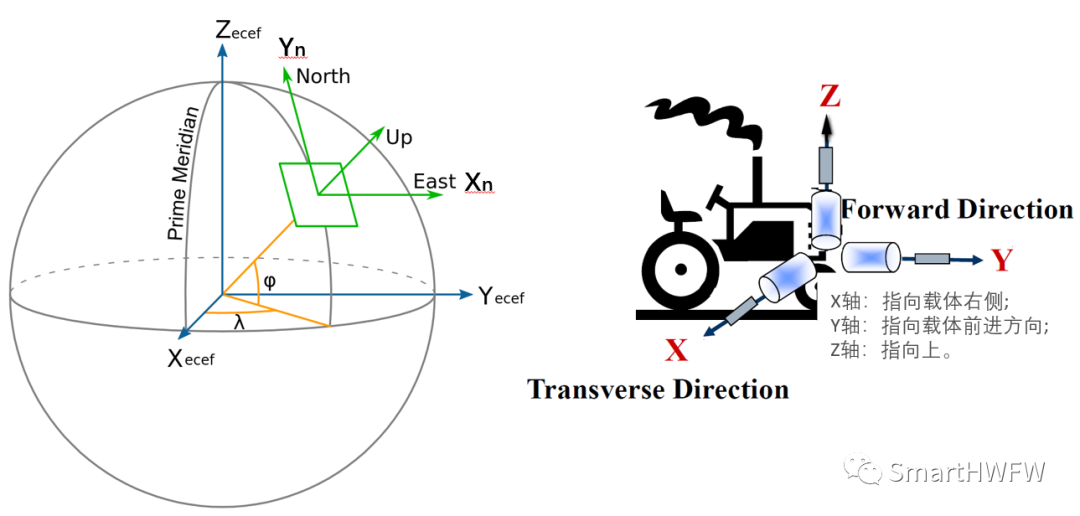
1) x軸指向東, y軸指向北, z軸指向天 2) 繞x軸轉動,稱為pitch角;? ?繞y軸轉動,稱為roll角; ?繞z軸轉動,稱為yaw角 3) 對應的載體坐標系是:右前上 4) 歐拉角旋轉順序:z-x-y
[東北地坐標系]-[前右下]
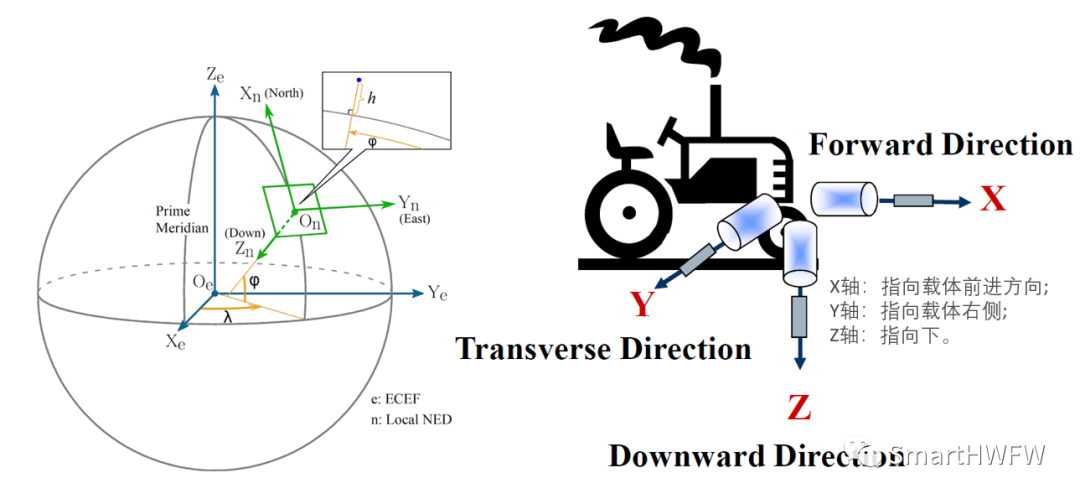
1) x軸指向北, y軸指向東, z軸指向地 2) 繞x軸轉動,稱為roll角;繞y軸轉動,稱為pitch角; 繞z軸轉動,成為yaw角 3) 對應的載體坐標系是:前右下 4) 歐拉角旋轉順序:z-y-x
總結:
| ? | 北東地坐標系 | 東北天坐標系 |
| 姿態角范圍 |
俯仰角(-90 ~ 90deg); 橫滾角(-180 ~ 180deg); 航向角(-180 ~ 180deg,可轉換為0~360deg); |
|
| 姿態角對應方向 | 根據右手定則來確定 | |
| 姿態角對應軸向 |
X軸:橫滾角 Y軸:俯仰角 Z軸:航向角 1. 俯仰角和橫滾角:方向與對應軸向轉動方向一致;繞對應軸正轉,相應姿態為正;繞對應軸反轉,相應姿態為負 2. X軸指北時,航向角為零。北偏東順時針依次從0變為360deg |
X軸:俯仰角 Y軸:橫滾角 Z軸:航向角 1. ?俯仰角和橫滾角:姿態角方向與對應軸向轉動方向一致;繞對應軸正轉,相應姿態為正;繞對應軸反轉,相應姿態為負。 2. ?航向角:姿態角方向與對應軸向轉動方向相反。 |
| ? | 注意:由于航向角定義為:Y軸指北時,航向角為零。北偏東順時針依次從0變為360deg。而Z軸指天,Z軸反轉時,航向角才依次增大。 | |
03?
?歐拉角旋轉?
在檢索參考資料的時候發現有大佬(站在巨人的肩膀上)圖文并茂的介紹這部分內容,原文作者講歐拉旋轉介紹的深入淺出、涇渭分明。
參考并直接閱讀如下三篇博文: ????
1.?三維旋轉矩陣推導與助記 ? ?
2.?歐拉角旋轉 ? ?
3.?歐拉角&旋轉矩陣 ?
簡單的說明一下 ???
1. 三維空間中剛體定點轉動需要三個自由度,最簡單的就是歐拉角表示。但是由于旋轉順序問題,歐拉角表示不唯一。根據坐標系繞其軸的旋轉順序不同,存在多種定義方式 ???
?2. 作者在文章提到的 慣性坐標在本文中對應導航坐標系(也稱為大地坐標系、實驗室參考系。不管名字怎么叫,其特點是這類坐標系是靜止不動的) ????
3. 旋轉順序按照不同的參考目標分成了 繞載體坐標軸旋轉: 旋轉順序依次是X、Y、Z ?和 繞導航坐標軸旋轉:旋轉順序依次是z、y、x(注意:這里的描述大寫字母XYZ坐標軸是旋轉的載體坐標軸;小寫字母xyz坐標軸是靜止不動的導航坐標軸。)
此圖順序為:先轉航向角, 再轉俯仰角,最后轉橫滾角(321(先轉Z軸,然后Y,最后X), 或者叫ZYX順序)
04? ?導航坐標系與載體坐標系之間的姿態旋轉矩陣?
1.基本旋轉矩陣
假設坐標系1 通過繞其3個軸旋轉后得到坐標系2,變換矩陣為: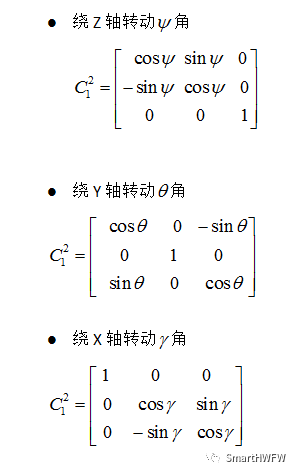 ?
?
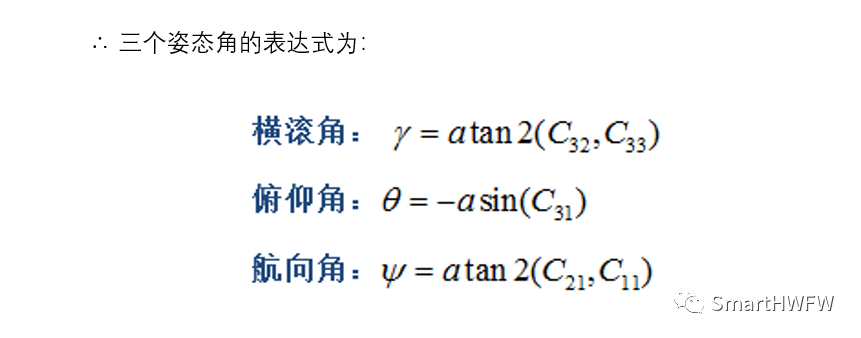
2. 導航坐標系[東北地坐標系]-[前右下]載體坐標系 ???
?歐拉角旋轉順序 3-2-1:偏航(Z 軸) - 俯仰(Y 軸) - 橫滾(X 軸) ????將導航坐標系 n 通過三次旋轉,旋轉到與載體坐標系 b 對齊
 ?
?
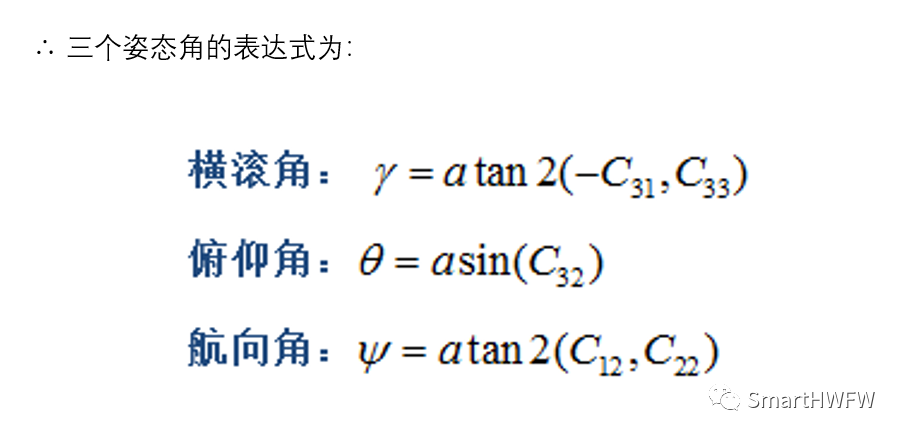
3. 導航坐標系[東北天坐標系]-[右前上]載體坐標系 ????
歐拉角旋轉順序 3-1-2:偏航(Z 軸) - 俯仰(X 軸) - 橫滾(Y 軸) ????將導航坐標系 n 通過三次旋轉,旋轉到與載體坐標系 b 對齊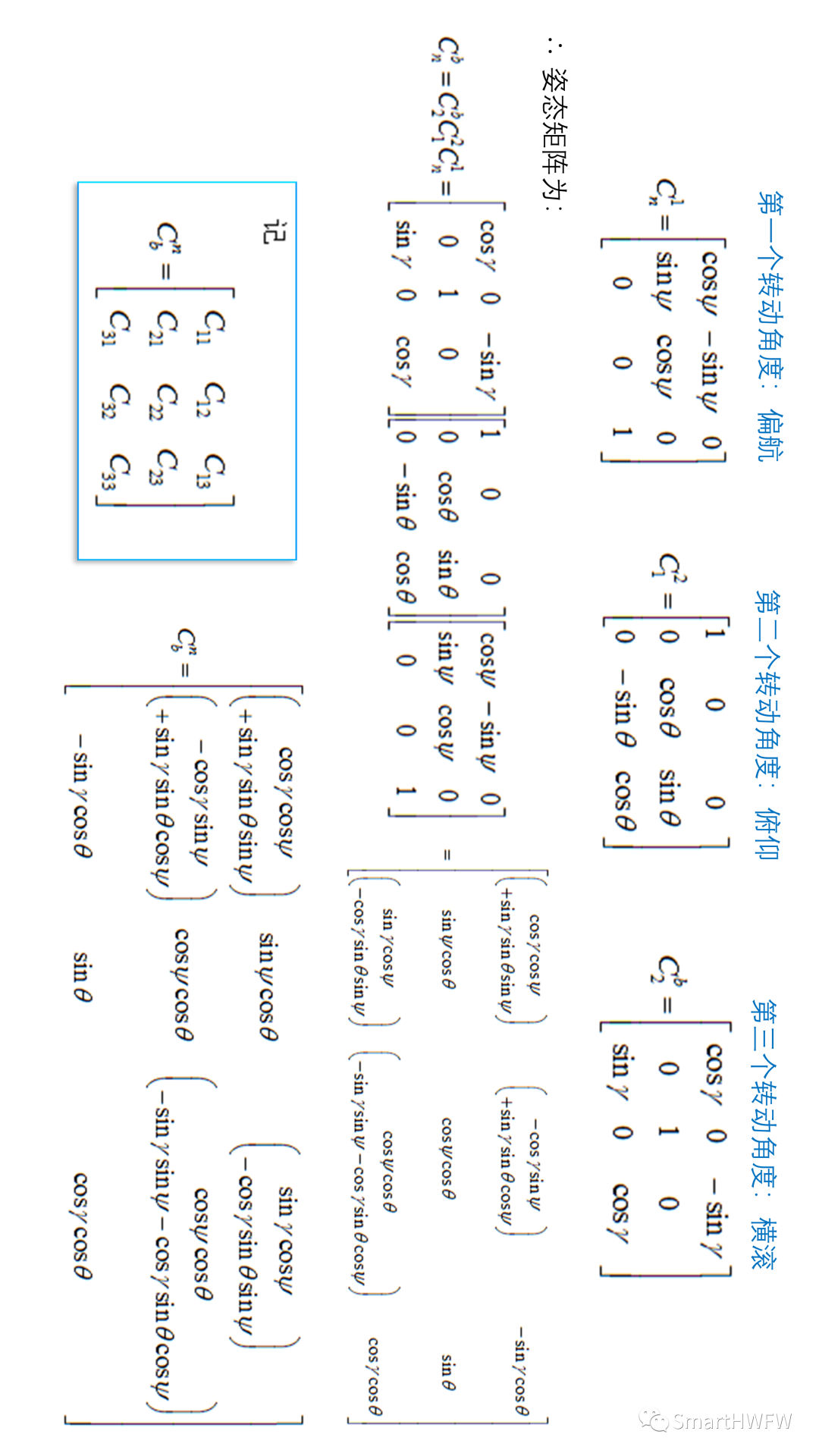
審核編輯:劉清