 電子發燒友App
電子發燒友App


引言
您可能知道您的照相手機內有照相模塊;但是它可能已經過時或者它并不是很昂貴,但它能夠拍照。如果您拍攝某位正在犯罪的人,但最終獲得的是模糊的圖像——不論是由于分辨率不夠、聚焦差或者曝光過程中的抖動——這種照片無法被法庭采用。但通常來說這種照相模塊的分辨率和性能改進很快。在2000年三星公司發布了SCH-V200,這是一款30萬像素的照相手機。在2003年NTT DoCoMo公司發布了1.3-MP P505iS,這是首款自動聚焦130萬像素照相手機。去年索尼愛立信公司發布了2-MP K750i,這是多數人認可的首款自動聚焦的200萬像素真正照相手機。在2006年三星公司發布了SCH-B600,這是一款1000萬像素的照相手機!
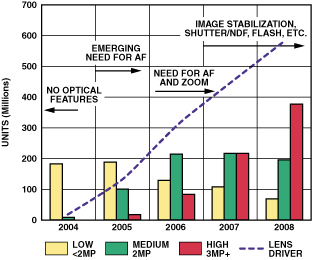
圖1. 到2008年照相手機和透鏡驅動器市場預測
上述許多功能中的一個關鍵要素是能夠迅速地移動透鏡以達到最佳聚焦。透鏡驅動器能夠響應數字控制信號提供適當移動透鏡的功率驅動能力。下面我們將討論透鏡驅動器的作用,介紹兩種有用的新產品,以及對市場中未來透鏡驅動器的考慮。
圖2示出數碼相機(DSC)1的通用框圖或信號鏈。經過透鏡投射到CMOS或CCD(電源耦合器件)傳感器的圖像經過掃描并且施加到模擬前端(AFE)2處理器3,AFE放大和調理原始視頻信號并將其轉換為數字信號。例如,AD98224是一款適合CCD圖像處理應用的完整的14 bit模擬信號處理器,它的三通道體系結構適合對彩色CCD陣列三路輸出進行采樣和調理。一旦圖像被轉換為數字形式,就可對它編輯、下載或存儲和進一步處理以便適合照相機操作,例如γ校正、對閃光燈的靈敏度調整以及用于聚焦的透鏡驅動。除了這些基本的功能單元,其它的傳感器可測量透鏡位置、光強、溫度、加速度和角速度(這些最終會影響圖像的穩定性)——并且電機和執行機構能夠控制快門、中性濾光片(NDF)、光圈和透鏡蓋。
照相手機與DSC
照相手機是當今世界增長最快的消費類市場并且在今后幾年仍會持續增長。這些模塊的尺寸和成本非常重要,但此外,用戶對真正照相機的性能要求越來越嚴格。事實上,新的照相手機和DSC之間的性能會聚幾年前就已經出現。
高分辨率DSC很容易以低成本提供,但是它的技術不能直接移植到手機上。為什么?它們的要求相當不同。DSC的首要和最重要的功能是照相——而手機的主要功能是打電話。內部包含的照相模塊是附加功能之一,但它不能大幅度地增加成本——或增大手機的體積。此外,對照相模塊有幾項功耗限制:大幅度減少通話時間的照相模塊從來都不會成功。
透鏡驅動器
透鏡驅動器控制執行機構,它可前后移動透鏡組以調整分辨率通常大于兩百萬象素的照相手機的聚焦和(或)放大倍率。
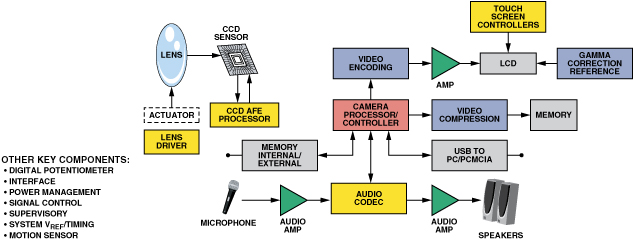
圖2. DSC信號鏈
較低分辨率的相機通常不需要自動聚焦,因此它們不需要透鏡驅動器。除了自動聚焦外,一些較高分辨率的相機會使用透鏡驅動器定位透鏡用于使圖像穩定性。圖3示出透鏡驅動器和其大部分可能的輸入和輸出。

圖3. 透鏡驅動器大部分可能的輸入輸出
通常,DSC使用數字步進電機作為執行機構;步進電機具有魯棒性,容易驅動的特性,所以可用來驅動自動聚焦(AF)和縮放透鏡執行機構。步進電機的另一個優點是在完成透鏡移動之后便能達到所要求的聚焦或放大倍率,所以無需再提供功率保持透鏡位置。但是當前DSC中采用的步進電機體積較大,成本很高,機構復雜,噪音大,速度慢以及功耗大,這些問題都趨向于使得當前的一些步進電機不適合用于手機中的照相模塊。此外,隨著照相手機增加的功能越來越多,要求高集成度的空間限制問題越來越明顯——這是當前步進電機技術的一個嚴重缺點。
新興的執行機構技術基于壓電材料,壓電材料種類繁多。壓電執行機構的結構簡單、它能夠使機構快速移動并且功耗很低。該機構可用于AF和縮放應用,并且不需要保持力在透鏡移動完成后保持透鏡的位置。在完成透鏡移動之后無需再提供功率保持透鏡位置。不幸的是,壓電執行機構的驅動方案非常復雜并且還處于不斷變化之中。另外,壓電材料具有一種很高的溫度系數,從而對驅動信號的頻率、相位差和占空比的溫度補償要求很嚴格。
執行機構技術的第三種選擇方案是具有彈力恢復的音圈電機(VCM),它是用于當今市場自動聚焦的最小體積最低成本的解決方案,它也是最易于實現的解決方案。這些優點很重要,因為帶自動聚集的照相模塊通常是當前市場銷量最大的產品。
使用VCM移動可重復并且無齒輪,透鏡位置由平衡電機和彈力固定。彈力可將透鏡恢復到無限聚焦的位置,除非需要聚焦否則不消耗功耗。它具有機構魯棒性、抗沖擊并且成本很低。這些電機無磁滯,因此具有一種直接的電流位置關系,所以通常不需要透鏡位置反饋。
圖4示出用于自動聚焦的典型彈力預載線性電機的轉移曲線——這是專用于照相手機的典型VCM轉移圖。轉移函數表示位移或行程(透鏡移動的實際距離)(mm)與通過電機的電流(mA)的關系。
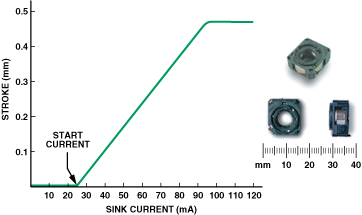
圖4. 彈力預載音圈行程與灌電流之間的關系曲線
啟動電流或閾值電流(為了產生彈力預載線性電機任何位移必須超過這個電流值)通常要求大于或等于20 mA。額定行程或位移通常是250 μm~400 μm。關系曲線的斜率是10 μm/mA。自動聚焦的最大透鏡位移是300 μm~400 μm,因此VCM非常適合這種功能水平。然而與壓電執行機構和步進電機不同,VCM在保持透鏡焦點位置時要消耗功率。
表I比較了可采用的幾種一流的執行機構。
表I. 幾種執行機構比較
| 電機類型 |
音圈電機(VCM) |
壓電電機(PEM) |
步進電機 |
|
尺寸 |
小 |
小 |
最大 |
|
成本 |
低 |
低 |
最高 |
|
速度(自動聚焦) |
10 ms |
3 ms |
100 ms |
|
能量(mJ) |
2.4 |
0.7 |
21 |
|
雙向 |
是——利用彈力 |
是 |
是 |
|
指示或靜止位置 |
是 |
否 |
否 |
|
重復性 |
好 |
差 |
中 |
|
需要齒輪 |
否 |
否 |
是 |
|
聲學噪音 |
- |
- |
高 |
|
驅動電機的 |
1 |
4 |
8 |
|
應用 |
AF和開關功能 |
AF和縮放 |
AF和縮放 |
用于自動聚焦的VCM驅動器解決方案
ADI公司目前唯一提供完全集成產品制造商特別關注能使相機設計工程師充分利用的AF新興市場。AD53985是一款完整的VCM驅動器解決方案,由于它包含一個120 mA輸出灌電流能力的10 bit數模轉換器(DAC),所以適合用于驅動音圈執行機構,例如用作透鏡自動聚焦和圖像穩定性。AD5398使用工業標準I2C?兩線串行協議控制。第二款VCM驅動器AD5821預計在2006年10月發布。AD5821具有與AD5398相同的功能設備,但它包含一個1.8 V兼容接口——并且硬件待機引腳XSHUTDOWN規定低電平有效(對于AD5398為高電平有效)。圖5示出AD5821的框圖。10 bit的電流輸出DAC連接負載電阻R后可產生一個驅動運算放大器同相輸入端的電壓。反饋使得這個電壓出現在RSENSE兩端,從而產生驅動音圈所需要的灌電流。
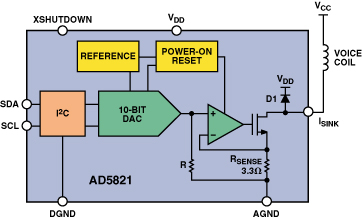
圖5.示出音圈連接的AD5821框圖
電阻器R和RSENSE在片內關聯并且匹配。因此它們的隨溫度變化的溫度系數和非線性誤差相匹配,從而使輸出溫度漂移最小。二極管D1提供輸出保護,并且當器件待機時消耗存儲在音圈中的能量。
未來透鏡驅動器
今后要求步進電機生產廠商減小尺寸并且降低成本。這就要求驅動器提高集成度、提高透鏡位置反饋驅動方案的效率、減小尺寸并且降低成本。許多照相模塊生產廠商正在試驗壓電執行機構,其本身為透鏡驅動器制造廠商提出了許多挑戰。電聚焦液體透鏡也將在不久面世。
圖6示出透鏡驅動器的壓電解決方案原理性框圖。這種解決方案也能夠應用到步進驅動器,但需要兩倍數量的驅動器。
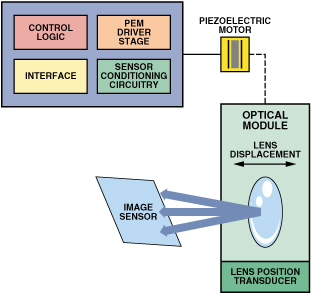
圖6. 可能的壓電解決方案框圖
壓電執行機構需要一個包含模擬驅動器、數字靈活性、信號調理和數據轉換器以及某些情況下還需要電源管理多種功能組合的驅動器。ADI公司在所有這些方面都具有專家經驗。用于手機市場的照相模塊非常復雜并且是多層面;在生產圖像傳感器(生產光模塊機構)的公司、透鏡制造商和透鏡驅動器制造商之間都具有相互依賴性。DSC證明雖然靠專用設計可以完成,但是減小尺寸,降低成本和功耗的主要挑戰之一是在透鏡驅動器內部進一步集成附加功能。隨著照相模塊的不斷發展,ADI公司將在開發新透鏡驅動器和其它芯片方面繼續保持領先地位。











 工商網監
工商網監
評論