 電子發燒友App
電子發燒友App


在20 世紀80 年代崛起的數字技術迅猛發展的光芒照耀下,模擬技術的進步,確顯的蹣跚滯后。 但 現時隨著科學技術的不斷發展,人們對自然認識的“與時俱進”,在電子電路技術領域對模擬電子線 路的認識又重新進行了定位。
雖然今天的模擬電路的功能大部分可以用集成電路來實現,但至今仍有許多模擬電路不得不采用大 量的分離電路 或 混合電路來實現,特別是在大功率、高頻、A/D、D/A 接口電路,而其中模擬電路的 難點應當首推為 微弱信號的調理電路和模數轉換電路。成功的電路測控系統,要求傳感器和模擬電路 有有機的阻抗匹配和能量匹配,系統要求電路平衡。
通常定義傳感器是一種換能器, 嚴格來說, 傳感器是一種接收信號或受激勵 并以電信號響應的能 量轉換器件。傳感器將其它類型的能轉換成電能,正是因為傳感器有如此類型的特點, 傳感器及其相關 的轉換、 調理電路和模數轉換電路可用來測量各種不同的物理量, 例如: 溫度、力、壓力、流量、 光強、物體加速度等。但是就傳感器本身而言傳感器不能獨立工作,通常 它是和信號調理電路和各種 模擬信號電路或數字信號電路構成一個電路系統。
大多數傳感器其滿度輸出都是相當小的微弱的信號,在進一步作模擬或數字處理之前,必須對它們 的輸出進行適當的處理。據此, 便發展出了通常稱之為的信號調理電路的一大類分枝電路。這類電路, 大至 分為放大、電平轉換、電隔離、阻抗變換、線性變換和濾波電路等。 但是,不管采取哪種調理方 式, 調理電路的結構和性能都取決于傳感器的電特性和輸出。根據傳感器的一種分類法,將傳感器分為 有源和無源二類。一般而言,有源類傳感器是指無需外部激勵自身可以產生變化的電信號;無源類傳感 器 則是指 需外部激勵方可產生變化的電信號,且自身不能產生電信號。 激勵又可分為 直流激勵,交流 激勵, 交直流混和激勵 三種。
本文 根據上述傳感器的分類,聯系具體的MEMS 壓阻式、MEMS 電容式傳感器的應用。來談一談調理 電路和模數轉換電路的實現的一些方法、規律。
傳感器調理電路和模數轉換電路的實現
1)直流激勵MEMS 壓力傳感器調理電路和模數轉換電路的實現
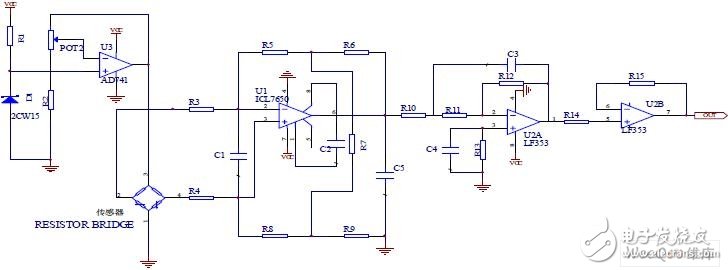
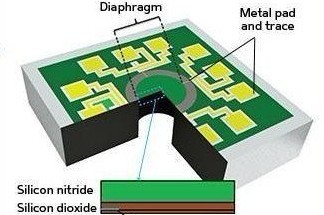
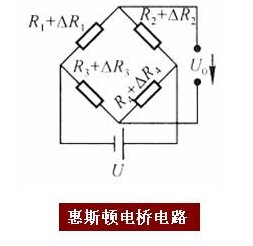
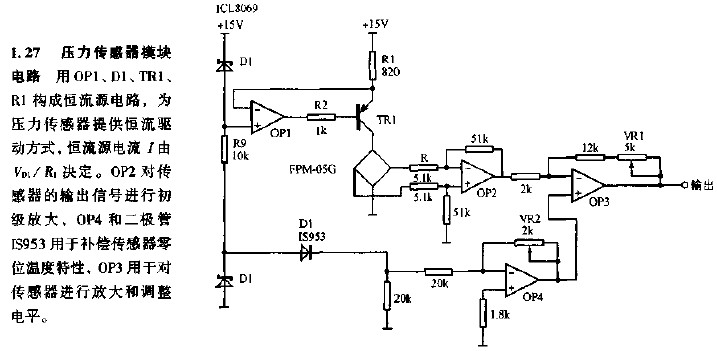
圖一 是一個測量壓力的電路原理圖,選用的壓力傳感器是 目前時尚的微機械MEMS 壓力傳感器。 微機械MEMS 系統 傳感器,是近些年來發展較快的一新科技領域,是以硅為基體,在此基礎上發展 出 流量、壓力、振動、角速度傳感器系列等。MEMS 壓力傳感器采用惠斯通電橋可變電阻法, 一對惠斯 通橋臂電阻被光刻在硅懸臂梁的正反二面上, 當懸臂梁受外力脅迫變形時, 會對 這對惠斯通電橋臂電 阻產生一拉,一壓的作用效果,這時,這對電橋臂電阻的阻值 就會發生變化。外力引起的變化調制成這 對電阻的阻值變化。硅 MEMS 壓力傳感器是一種無源傳感器, 硅懸臂梁在壓力作用下產生變形,從而引 起這對惠斯通橋臂電阻的阻值變化。在外加直流電壓或電流的激勵下,外加壓力通過引起電阻的變化, 被調制成電信號的變化。
這對惠斯通電橋臂電阻采用光刻 蝕而成,一般在10K 左右。用MEMS 做成的壓力傳感器比應變片做成的壓力傳感,電阻值高,器靈敏度高,抗干擾性好,壽命長。
圖一 是一個測量壓力的電路原理圖:
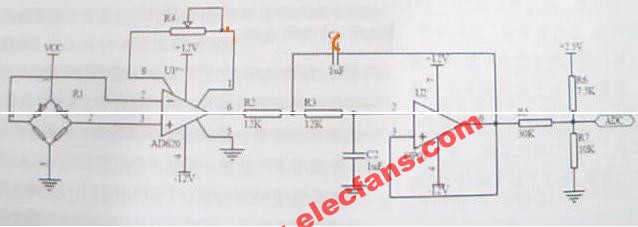
具體電路如圖一所示,一級運 放 U1 采用增益可調平衡差動放大電路輸入法,其目的是最大限度的壓制共模干擾,提高系統精度。
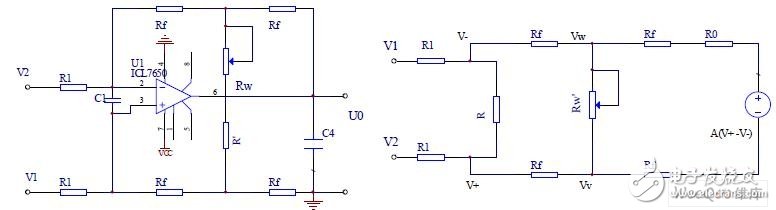
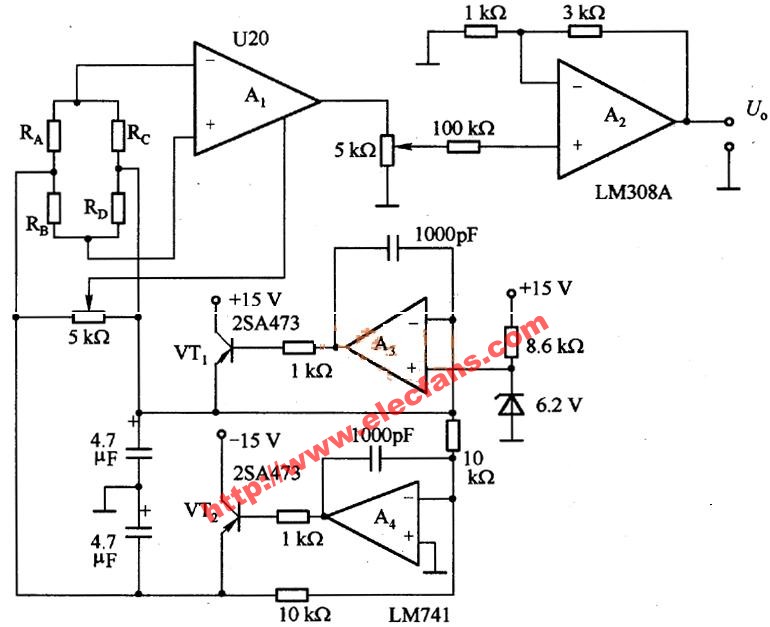
圖二 增益可調平衡差動放大電路原理及等效電路圖
圖二是 增益可調平衡差動放大電路原理及等效電路圖,其中 RW‘=RW=+R’,R0??0 據此推到出可調平衡差動放大電路輸出對輸入的關系,由節點方程:
第一級運 放 U1 采用的是差分輸入,選用的運算放大器 是自斬波、自穩零 運算放大器 ICL7650。該放大器可同時完成調制和解調工作,因而可直接放大直流信號,且失調小,輸入阻抗高。
差分信號經一級ICL7650 放大后, 將通過二階有源低通濾波器,濾除高頻雜波, 再經跟隨器輸出。 二階有源低通濾波器的截止頻率 200Hz。濾波器和跟隨器選用的運算放大器是高精度、低漂移、運算放 大器LF353。為提高系統精度,本電路系統采用 恒流,灌電流直流激勵,避免傳感器電阻值變化不平衡 引入熱噪聲。
模擬電路使用的恒流源常有,拉電流和灌電流二種, 本電路系統采用的是灌電流 恒流法。U3 和 周圍電路組成恒流源,調節電位器POT2 可以改變灌電流的大小。
2) 交 直流激勵MEMS
差分電容振動加速度傳感器調理電路和模數轉換電路的實現 加速度傳感器是將運動或重力轉換成電信號的傳感器,一般把 加速度傳感器與電信號調理電路集 成后制的成組件稱為加速度計。重力加速度及勻加速度常被稱為直流加速度或靜態加速度,由振動等產 生的動態加速度稱為交流加速度。 現流行的,科技較前沿的MEMS 器件加速度計,其傳感器原理一般基于差動電容,加速度計主要由 質量彈性元件,位移測量系統及信號調理電路構成。
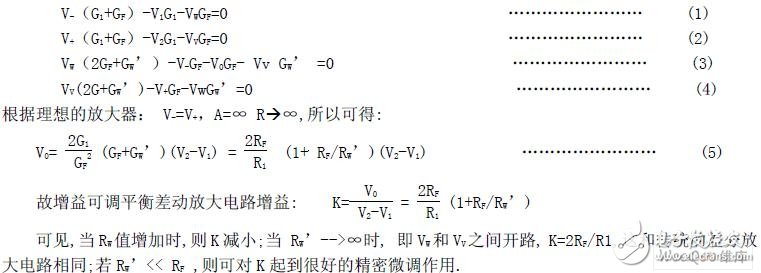
圖 三 平行金屬板電容器結構原理圖
位移測量系統的基本工作原理常是利用電容變化的物理特性。最簡單的電容器是由兩平行金屬板 構成,如圖三所示。 電容 C=k/X0 , k 是與板間距離及金屬板間物質相關的特性常數。由電容可以求出 平行金屬板間距X0。一般都是在平行金屬板間插入中間極板構成差分電容來測量微小距離。

結論:可以根據測量△C 知到物體的運動速度和加速度,他們具有相應的微分關系。
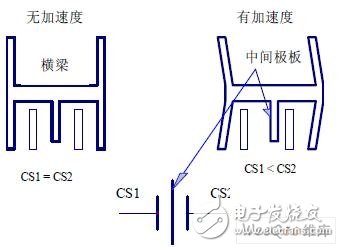
圖 四 MEMS 電容式振動加速度傳感器結構圖:
圖四, 中間極板(即橫梁的伸出部分)與二個固定的外極板組成差動電容 CS1 和CS2.。沒有加速度 時, CS1=CS2;產生加速度時,橫梁的移動改變了中間極板和固定的外極板之間的相對位置,引起電容 變化,CS1≠CS2 。可通過一定的測量電路,將電容的變化,在外加交流電壓的激勵下轉化為電學量,電壓或電流輸出,通過測量電學量就能夠測得該物體相應的瞬時速度或瞬時加速度值。
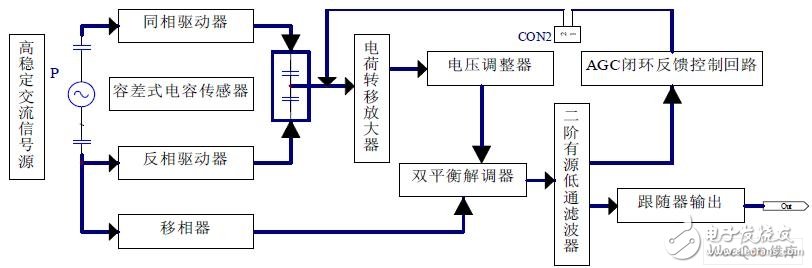
圖五 交直流激勵差分電容振動加速度傳感器調理電路方框圖:
如圖五所示, 差分電容振動加速度傳感器(屬無源傳感器)需在外加電壓的作用下方能將振動信 號調制為電信號輸出。由于差分電容振動加速度傳感器屬電容性器件,有隔直通交作用,所以不能用直 流信號作激勵源,只能采取交流激勵法將振動信號調制在交流激勵信號之上;將調制信號適度放大,使 之有了抗雜波和分辨的能力,再經同步解調,解調出能反應振動加速度大小的電信號;電信號再經過二 階低通濾波器,濾除高頻成分;最后 信號經調整,經跟隨器輸出。該套電路在開環的基礎上有選擇地 增加了AGC 控制回路,擬增加傳感器的靈敏度和帶寬,壓低噪聲。
具體電路如圖六所示:采用芯片U0( MAX038)信號發生器芯片產生 1M Hz 的正弦交流信號;U1 (AD797)運算放大器組成反相比例放大器,U2(AD797) 運算放大器組成反同相比例放大器。1M Hz 的交流信號經 U1,U2 后,變為大小相等,方向相反,及相位相差為 1800 的 二個交流激勵信號,用該 交流激勵信號激勵差分電容傳感器;U4(AD745JR)是高輸入阻抗電荷轉移放大器,該放大器的特點是 具有很高的輸入阻抗,漏電電流極小(注:MEMS 電容傳感器△C 一般只有1—4p,漏電對傳感器的精度 影響很大),提高系統精度。U4 是調理電路的中心,它是將在外加激勵信號的作用下,傳感器振動引起 的電荷的變化轉移成電壓信號的變化。R12、R13、R14 采用T 型連結,目的是提升電路阻抗,提高電路 系統放大倍數。U6(AD797)運算放大器是 將C11、R16 組成的高通濾波器已去除低頻干擾后的電壓信 號經適當放大,為下一步同步解調作好準備;U3(AD797)運算放大器組成的移相電路,其作用是使調制 信號和解調信號同步;本傳感器調理電路的同步解調器所采用的芯片為 美國 AD 公司生產的平衡解調 器U5 (AD630),所謂 平衡解調器是指:調制信號被解調出的結果只和調制信號的相位、頻率有關而 和調制信號的幅值無關;經U5 同步解調出的電壓信號就是反應振動加速度大小的信號;U9( OP137) 運算放大器組成二階有源低通濾波器,電壓信號經二階低通濾波器,濾除信號中高頻噪音成份;U10 ( OP177)運算放大器組成 跟隨器,信號經 調整, 跟隨輸出。U7 (OP137) 運算放大器組成反饋 AGC 回路,將振動加速度信號的輸出信號比例后反饋回源極,使動極板產生和加速度方向相反的靜電力, 目的是增加加速度計的靈敏度和帶寬。該套加速度計的分辨率為 2-18。
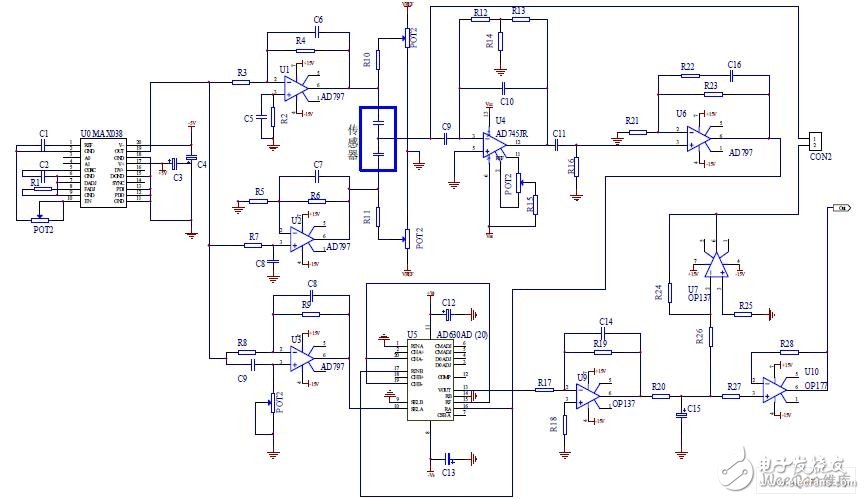
圖 六 交直流激勵差分電容振動加速度傳感器調理電路:
(注:激勵信號采用正弦交流信號而不用方波信號,是因為方波信號為離散信號沒有連續性, 解調時易產生尖頂脈沖過沖雜波,該尖頂脈沖過沖雜波不易濾除,貫穿整個電路,影響電路分辨率)
本文的創新點: 傳感器技術是信息社會的一大支柱,根據電容的物理特性制作的傳感器在傳感器家族中站有重 要的地位。提高微小電容、微小電容差分檢測精度,是目前中外測控技術領域科技攻關的焦點,也是 科技發達國家共認的測控科技的置高點。
本文重點講述了一套微小電容差分高精度檢測電路,用該套電路可測物體的加速度,該套加速度計 的分辨率可達 2-18。。。 本系統電路涉及 交流驅動,前置放大、阻抗匹配,同步解調,有源濾波等。通過對二個案例的 介紹,以期待讀者對交、直流驅動;何時采用交流驅,動何時采用直流驅動有所理解。以期待讀者 對系統電路的前置放大、阻抗匹配;為什么要前置放大、阻抗匹配;怎樣進行前置放大、阻抗匹配有 所理解。通過對微小電容差分高精度檢測電路的研究,提高模擬電路的設計水平。














 工商網監
工商網監
評論