一個(gè)遙控器上的一個(gè)通道,如收放起落架通道作為觸發(fā)外部中斷的通道,請(qǐng)問我的程序應(yīng)該怎么設(shè)計(jì)?最弄不懂的就是關(guān)于天地飛接收機(jī)脈沖信號(hào)的讀取問題,如果進(jìn)行了外部中斷,單片機(jī)就會(huì)轉(zhuǎn)入執(zhí)行中斷程序,單片機(jī)
2014-06-24 12:16:02
控制系統(tǒng)中,通常采用的是數(shù)字電傳控制系統(tǒng)。其基本原理便是將傳感器信號(hào)送給控制盒(控制計(jì)算機(jī)),經(jīng)過綜合運(yùn)算比較后發(fā)出指令給執(zhí)行機(jī)構(gòu),控制環(huán)節(jié)為余度控制。 現(xiàn)代民用飛機(jī)起落架收放包括正常收放和應(yīng)急釋放
2018-11-12 11:07:33
不可過早或過晚。過早,
飛機(jī)離地大近,如果
飛機(jī)有下俯,就可能重新接地,危及安全;過晚,速度大大,
起落架產(chǎn)生的阻力很大,不易增速,還可能造成
起落架收下好。在
一段平飛或小角度上升中,特別要防止出現(xiàn)坡度,因?yàn)?/div>
2010-02-24 10:59:56
將IPA轉(zhuǎn)譯為輸出PA。MMU?700為翻譯的每個(gè)階段執(zhí)行翻譯表遍歷。
除了將輸入地址轉(zhuǎn)換為輸出地址之外,地址轉(zhuǎn)換的一個(gè)階段還定義了輸出地址的存儲(chǔ)器屬性。對(duì)于兩階段翻譯,第2階段翻譯可以修改第1階段
2023-08-08 07:44:49
)、野生動(dòng)物、樹葉、石頭和沙子、道面材料、木塊、塑料或聚乙烯材料、紙制品、運(yùn)行區(qū)的冰碴兒等。二、FOD的危害FOD可以很容易被吸入發(fā)動(dòng)機(jī),導(dǎo)致發(fā)動(dòng)機(jī)失效。碎片也會(huì)堆積在機(jī)械裝置中,影響起落架、襟翼等
2020-10-10 09:26:35
AWTK = Toolkit AnyWhereAWTK是吸取了FTK和CanTK的精華,重新開發(fā)的GUI,計(jì)劃分以下幾個(gè)階段實(shí)施:第一階段專注于嵌入式系統(tǒng),到達(dá)并超越TouchGfx
2021-08-20 06:22:39
建立了系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)。這一階段是整個(gè)項(xiàng)目的基礎(chǔ),涉及到光學(xué)系統(tǒng)設(shè)計(jì)、激光器的選擇和振鏡驅(qū)動(dòng)器的初步概念設(shè)計(jì)。
硬件電路與軟件開發(fā):這一部分主要關(guān)注于硬件電路的設(shè)計(jì)和軟件的開發(fā)。硬件方面,涵蓋了控制
2023-12-22 11:00:51
我是個(gè)新手,使用飛凌的MX6ULC開發(fā)板,用資料里面的Mfgtools下載工具,只能完成第一階段的下載到ram,Mfgtools顯示Jumping to OS image后然后就提示
2022-01-07 08:59:44
目錄一.作者:懶懶土撥鼠第一階段稱為stm32+RTOS階段。第二階段稱為多核+Linux階段。第三階段最后薦書環(huán)節(jié)二.作者:程序員良許轉(zhuǎn)折點(diǎn)入門新挑戰(zhàn)Linux應(yīng)用的學(xué)習(xí)1.環(huán)境搭建2.基本操作
2021-08-06 09:56:13
。 二、第一階段啟動(dòng)流程 裁剪之后的start.S文件如下: .globl _start _start: breset /***********************************設(shè)置異常
2018-07-04 04:51:18
項(xiàng)目名稱:工廠無線化控制研發(fā)試用計(jì)劃:申請(qǐng)理由:學(xué)習(xí)華為鴻蒙系統(tǒng),并將互聯(lián)理念應(yīng)用于工廠實(shí)踐(經(jīng)濟(jì)能力有限)項(xiàng)目名稱:工廠無線化控制研發(fā)項(xiàng)目計(jì)劃:一階段學(xué)習(xí)和了解鴻蒙系統(tǒng),二階段試驗(yàn)性項(xiàng)目,制作
2020-11-23 15:13:55
的APP實(shí)現(xiàn)。項(xiàng)目計(jì)劃: 本項(xiàng)目大體分為4個(gè)階段,第一階段為入門篇,切身體驗(yàn)MiCOKit開發(fā)套件硬件資源,軟件資源和開發(fā)環(huán)境,第二階段為功能篇,通過編程,實(shí)現(xiàn)各功能模塊的使用方法,第三階段為系統(tǒng)篇,整合
2015-08-22 17:28:34
。最后通過4篇系統(tǒng)篇的介紹,分別使用Boa服務(wù)器,Bootstrap網(wǎng)頁前端工具和CGI腳本,完成了最基本的項(xiàng)目要求,即一個(gè)簡(jiǎn)單的智能家居系統(tǒng)應(yīng)用。 通過第一階段的試用,對(duì)OK210有了更深的了解
2015-09-05 22:55:57
推薦】網(wǎng)上整理的動(dòng)態(tài)原理圖,第四期https://bbs.elecfans.com/jishu_532679_1_1.html 電影機(jī)的送片機(jī)構(gòu)雙八字結(jié) 雙環(huán)結(jié)(豬蹄扣)速解結(jié)(變形布林結(jié))繞線 起重機(jī)圓錐破碎機(jī)真空泵打氣筒 泥漿泵 拉鎖發(fā)電機(jī)飛機(jī)起落架粉碎機(jī)開鎖
2015-12-14 11:04:45
請(qǐng)問:1. uboot在第一階段就已經(jīng)進(jìn)行時(shí)鐘初始化了,為什么第二階段還要進(jìn)行,兩者之間有什么區(qū)別?2. 在start_armboot中為什么init_fnc_t**init_fnc_ptr
2019-09-23 02:28:27
人工智能發(fā)展第一階段,開發(fā)近紅外光激發(fā)的納米探針,監(jiān)測(cè)大腦深層活動(dòng),理解神經(jīng)系統(tǒng)功能機(jī)制。開發(fā)、設(shè)計(jì)電壓敏感納米探針一直是個(gè)技術(shù)難關(guān)。群體神經(jīng)元活動(dòng)的在體監(jiān)測(cè)是揭示神經(jīng)系統(tǒng)功能機(jī)制的關(guān)鍵。近日《美國
2021-07-28 07:51:24
)、野生動(dòng)物、樹葉、石頭和沙子、道面材料、木塊、塑料或聚乙烯材料、紙制品、運(yùn)行區(qū)的冰碴兒等。二、FOD的危害FOD可以很容易被吸入發(fā)動(dòng)機(jī),導(dǎo)致發(fā)動(dòng)機(jī)失效。碎片也會(huì)堆積在機(jī)械裝置中,影響起落架、襟翼等
2020-09-14 14:28:07
問題:uboot第一階段到底啟動(dòng)mpll沒有,在源代碼里只看到了設(shè)置CLKDIVN,卻沒有看到設(shè)置MPLLCON呀,難道沒有啟動(dòng)mpll?如果不啟動(dòng)mpll的話,那在lowlevel.c中設(shè)置了內(nèi)存刷新率,這個(gè)刷新率豈不是無法工作?
2013-05-13 10:28:45
三段式充電:第一個(gè)階段叫恒流階段(即主充),第二個(gè)階段叫恒壓階段(即均充),第三個(gè)階段叫涓流階段(即浮充)。在第一個(gè)階段充電電源給出恒定較大電流,此時(shí)電源怎么設(shè)置輸出電壓呢??很多三階段充電原理中都沒提到第一階段的充電電壓,小弟求解惑啊。。。。。。先拜謝了~~
2013-07-07 22:21:55
可以加張工一起學(xué)習(xí)2232894713第一階段:增強(qiáng)補(bǔ)弱階段 1.1強(qiáng)化數(shù)字電路常用元件、常用芯片、常用電路設(shè)計(jì) 1.2電子產(chǎn)品開發(fā)流程及行業(yè)分析1.3電子工程師焊接,調(diào)試實(shí)際動(dòng)手能力及細(xì)節(jié)管理知識(shí)
2014-09-13 15:48:36
系統(tǒng)工程師第一階段的課程主要幫助學(xué)員了解FPGA系統(tǒng)設(shè)計(jì)的基礎(chǔ)知識(shí),掌握FPGA最小系統(tǒng)硬件電路設(shè)計(jì)方法,學(xué)會(huì)操作QuartusII軟件來完成FPGA的設(shè)計(jì)和開發(fā)。fpga學(xué)習(xí)交流
2015-10-27 17:57:38
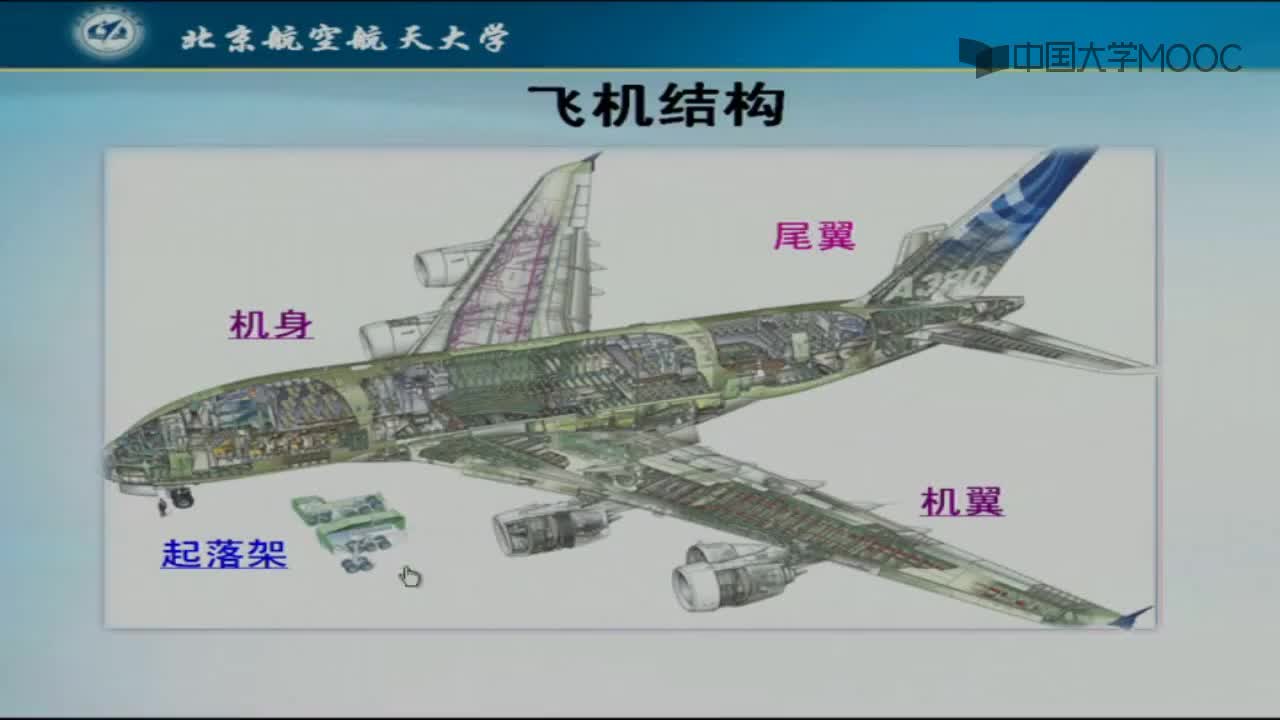
飛機(jī)一般由機(jī)翼、機(jī)身、起落架和飛機(jī)操作系統(tǒng)組成,其結(jié)構(gòu)受力復(fù)雜,用以往的經(jīng)典工程分析進(jìn)行應(yīng)力分析已滿足不了現(xiàn)代飛機(jī)型號(hào)設(shè)計(jì)的要求,花費(fèi)的時(shí)間長(zhǎng),分析的部位具有局限性。隨著大型計(jì)算機(jī)及工作站的出現(xiàn)
2019-07-03 07:04:00
描述此 PMP5660 可提供從通用輸入到兩串 LED(每串最高 700mA,50V)的高效率二階段解決方案:PFC TM 升壓和多變壓器 LLC 諧振。TLC555 可提供內(nèi)部 PWM 調(diào)光功能。
2018-12-21 14:32:53
目錄一、總體介紹二、機(jī)架機(jī)身----------參數(shù)指標(biāo):起落架---------- 作用:涵道----------作用:參數(shù)三、動(dòng)力系統(tǒng)螺旋槳----------螺旋槳的指標(biāo)參數(shù):靜平衡和動(dòng)平衡
2021-09-14 09:11:04
第一階段 電子設(shè)計(jì):重點(diǎn)學(xué)習(xí)數(shù)字電路,模擬電路設(shè)計(jì),系統(tǒng)電路設(shè)計(jì),實(shí)戰(zhàn)開發(fā),課程詳情請(qǐng)點(diǎn)擊 68 第二階段 單片機(jī)編程開發(fā):通過系統(tǒng)的學(xué)習(xí)單片機(jī)編程,匯編語言,C語言等開發(fā)對(duì)單片機(jī)的編程有系統(tǒng)的熟悉
2021-09-25 09:58:32
神啊如何實(shí)現(xiàn)一段語音的快放與慢放
2013-07-03 21:33:36
的每個(gè)階段執(zhí)行多次設(shè)計(jì)審查以評(píng)估進(jìn)度。設(shè)計(jì)評(píng)審并不一定很困難,它們只是在設(shè)計(jì)硬件時(shí)附帶的。但是,它們可能會(huì)浪費(fèi)時(shí)間,并且它們可能需要大量的行動(dòng)和人為操作,這些行動(dòng)和人為操作還經(jīng)常會(huì)發(fā)生數(shù)據(jù)丟失,溝通不暢
2022-06-14 13:43:55
必須通過 UART0 與第一階段引導(dǎo)加載程序通信(以何種波特率/啟動(dòng)/停止/奇偶校驗(yàn)設(shè)置)將第一個(gè)客戶應(yīng)用程序?qū)懭腴W存(或?qū)懭?SRAM 的“生產(chǎn)圖像加載器”應(yīng)用程序)?是否有應(yīng)用筆記描述了
2023-04-11 06:54:52
起落架附近,靠近襟翼的外邊緣和發(fā)動(dòng)機(jī)噴管的地方。對(duì)于2000Hz噪聲,我們發(fā)現(xiàn)噪聲源靠近發(fā)動(dòng)機(jī)噴管,主起落架和前起落架,但不會(huì)出現(xiàn)在襟翼的外邊緣處。通過這個(gè)測(cè)試,我們展示了對(duì)飛行中飛機(jī)的多個(gè)噪聲源進(jìn)行定位
2019-04-03 09:40:03
和linux內(nèi)核。首先是最底層的u-boot,先從移植學(xué)起,本次學(xué)習(xí)內(nèi)容,u-boot第一階段移植到mini2440(參考韋東山視頻):uboot版本:u-boot-2012.04.01linux環(huán)境
2016-08-08 16:30:00
,熟悉中斷、定時(shí)器、串口、NAND FLASH、網(wǎng)絡(luò)控制器、LCD屏、觸摸屏等常用嵌入式外圍設(shè)備的硬件工作原理,以及如何使用C語言來編程、控制這些硬件。這一階段除了要學(xué)習(xí)對(duì)硬件編程之外,還需要學(xué)習(xí)嵌入式
2016-09-20 11:36:58
,對(duì)硬件進(jìn)行編程控制。這和硬件工程師學(xué)習(xí)的側(cè)重點(diǎn)有所不同。這一階段對(duì)應(yīng)的學(xué)校的課程主要包括模擬電路、數(shù)字電路、微機(jī)原理和單片機(jī)。這一階段重點(diǎn)是要看CPU的芯片手冊(cè),大部分的參考書也是對(duì)芯片手冊(cè)的翻譯。 3
2023-06-14 16:00:18
、高精度、低功耗的方向發(fā)展。隨著硬件實(shí)時(shí)性要求的提高,嵌入式系統(tǒng)的軟件規(guī)模也不斷擴(kuò)大,逐漸形成了實(shí)時(shí)多任務(wù)操作系統(tǒng)(RTOS),并開始成為嵌入式系統(tǒng)的主流。這一階段嵌入式系統(tǒng)的主要特點(diǎn)是:操作系統(tǒng)的實(shí)時(shí)性
2020-06-23 15:51:41
采用匯編語言。由單片機(jī)構(gòu)成的這種嵌入式系統(tǒng)使用簡(jiǎn)便、價(jià)格低廉,在工業(yè)控制領(lǐng)域中得到了非常廣泛的應(yīng)用.這一階段的特點(diǎn):系統(tǒng)結(jié)構(gòu)和功能比較單一、處理效率不高、存儲(chǔ)容量小、沒有用戶接口;簡(jiǎn)單操作系...
2021-10-27 08:58:15
航空安全帶來隱患。在一般的空客飛機(jī)起落架控制系統(tǒng)中,通常采用的是數(shù)字電傳控制系統(tǒng)。其基本原理便是將傳感器信號(hào)送給控制盒(控制計(jì)算機(jī)),經(jīng)過綜合運(yùn)算比較后發(fā)出指令給執(zhí)行機(jī)構(gòu),控制環(huán)節(jié)為余度控制。現(xiàn)代民用飛機(jī)
2019-09-28 07:30:00
嵌入式CPU應(yīng)用最廣泛,這一階段重點(diǎn)是學(xué)習(xí)嵌入式CPU的裸機(jī)編程,熟悉中斷、定時(shí)器、串口、NAND FLASH、網(wǎng)絡(luò)控制器、LCD屏、觸摸屏等常用嵌入式外圍設(shè)備的硬件工作原理,以及如何使用C語言來編程
2016-05-15 09:37:20
ARM 嵌入式CPU應(yīng)用最廣泛,這一階段重點(diǎn)是學(xué)習(xí)嵌入式CPU的裸機(jī)編程,熟悉中斷、定時(shí)器、串口、NAND FLASH、網(wǎng)絡(luò)控制器、LCD屏、觸摸屏等常用嵌入式外圍設(shè)備的硬件工作原理,以及如何使用C
2016-05-16 10:26:25
我有一個(gè)隨機(jī)出現(xiàn)的問題,其中par在第4階段陷入困境。一個(gè)簡(jiǎn)單的RTL mod將使問題消失。硬件是Virtex-6 XC6VLX130T-3。我正在使用EDK 13.3的XPS。 par選項(xiàng)(來自
2018-10-10 11:02:29
飛機(jī)的油液監(jiān)測(cè)是利用油液分析技術(shù)對(duì)飛機(jī)使用的潤(rùn)滑油和液壓油進(jìn)行綜合分析,以獲得飛機(jī)發(fā)動(dòng)機(jī)的潤(rùn)滑和磨損情況以及液壓系統(tǒng)的使用情況,進(jìn)行油液分析可以有效地監(jiān)測(cè)飛機(jī)的發(fā)動(dòng)機(jī)、起落架、襟副翼和尾翼等關(guān)鍵部件的使用情況,檢查并預(yù)測(cè)飛機(jī)的故障,保證飛行的安全。
2019-08-15 06:31:13
001-用pixhawk4飛控組裝一臺(tái)S500無人機(jī)-材料清單這個(gè)是官網(wǎng)的安裝說明,我這里會(huì)詳細(xì)的進(jìn)行記錄:Holybro S500 V2 + Pixhawk 4構(gòu)建1、組裝起落架。我們將從將起落架
2021-09-13 06:26:00
外圍設(shè)備的硬件工作原理,以及如何使用C語言來編程、控制這些硬件。這一階段除了要學(xué)習(xí)對(duì)硬件編程之外,還需要學(xué)習(xí)嵌入式硬件的知識(shí),但是對(duì)于嵌入式軟件工程師來講,重點(diǎn)是學(xué)習(xí)硬件的工作原理,在掌握硬件工作原理
2016-05-29 10:40:49
重點(diǎn)是學(xué)習(xí)嵌入式CPU的裸機(jī)編程,熟悉中斷、定時(shí)器、串口、NAND FLASH、網(wǎng)絡(luò)控制器、LCD屏、觸摸屏等常用嵌入式外圍設(shè)備的硬件工作原理,以及如何使用C語言來編程、控制這些硬件。這一階段除了
2016-05-23 10:09:08
,飛機(jī)起落架上大都使用特制的接地輪胎或接地線,以泄放掉飛機(jī)在空中所產(chǎn)生的靜電荷。我們還經(jīng)常看到油罐車的尾部拖一條鐵鏈,這就是車的接地線。適當(dāng)增加工作環(huán)境的濕度,讓電荷隨時(shí)放出,也可以有效地消除靜電。潮濕
2013-02-27 10:23:31
飛 機(jī)起 落 架系統(tǒng)是飛機(jī)的一個(gè)至關(guān)重要的組成部分,在飛機(jī)著陸及地面滑跑過程中起著舉足輕重的作用。為了不斷增強(qiáng)飛機(jī)系統(tǒng)的可靠性、安全性和有效性,保證飛機(jī)的正常
2010-08-14 16:50:13 39
39 某型飛機(jī)疲勞試驗(yàn)過程中的聲發(fā)射監(jiān)測(cè)技術(shù)研究--起落架收放控制試驗(yàn)過程中的聲發(fā)射監(jiān)測(cè)摘 要:起落架收放控制系統(tǒng)試驗(yàn)是某型飛機(jī)全機(jī)疲勞試驗(yàn)的一
2009-10-22 16:17:16 535
535 本大學(xué)生創(chuàng)新性實(shí)驗(yàn)項(xiàng)目所設(shè)計(jì)制作的飛機(jī)從機(jī)翼到機(jī)身再到滾轉(zhuǎn)平衡控制系統(tǒng)的電路板的設(shè)計(jì)以及程序的編寫均為學(xué)生自己完成。飛機(jī)采用常規(guī)上單翼前三點(diǎn)式起落架布局,動(dòng)力系統(tǒng)
2011-06-22 16:52:22183 該資料詳細(xì)介紹了研發(fā)設(shè)計(jì)制造一套飛機(jī)著陸系統(tǒng)整個(gè)過程及參數(shù)
2016-01-13 10:26:405 無人機(jī)市場(chǎng)被帶火了之后,很多供應(yīng)鏈上游的行業(yè)重新煥發(fā)了生機(jī),比如做碳纖維的、做電池的,甚至做起落架的。其中,很多配件都在適應(yīng)著無人機(jī)行業(yè)的變化,比如電機(jī)。
2017-01-09 15:50:08741 飛機(jī)一般由機(jī)翼、機(jī)身、起落架和飛機(jī)操作系統(tǒng)組成,其結(jié)構(gòu)受力復(fù)雜,用以往的經(jīng)典工程分析進(jìn)行應(yīng)力分析已滿足不了現(xiàn)代飛機(jī)型號(hào)設(shè)計(jì)的要求,花費(fèi)的時(shí)間長(zhǎng),分析的部位具有局限性。隨著大型計(jì)算機(jī)及工作站的出現(xiàn)
2017-10-31 10:53:460 針對(duì)某型支線客機(jī)的起落架收放系統(tǒng),分析了其主要故障類型和故障原因。應(yīng)用AMESim仿真平臺(tái)建立了起落架收放系統(tǒng)模型,對(duì)該系統(tǒng)的正常收放過程進(jìn)行了仿真,得到作動(dòng)筒行程和液壓泵出口壓力、流量變化情況
2017-11-29 10:01:4223 這些傳感器應(yīng)用廣泛,接近傳感器可以被設(shè)計(jì)成一系列的飛行器系統(tǒng)如推力反向器驅(qū)動(dòng)系統(tǒng),飛行控制、飛機(jī)艙門、貨艙裝載系、疏散滑鎖和起落架。
2018-07-23 11:46:00697 飛機(jī)一般由機(jī)翼、機(jī)身、起落架和飛機(jī)操作系統(tǒng)組成,其結(jié)構(gòu)受力復(fù)雜,用以往的經(jīng)典工程分析進(jìn)行應(yīng)力分析已滿足不了現(xiàn)代飛機(jī)型號(hào)設(shè)計(jì)的要求,花費(fèi)的時(shí)間長(zhǎng),分析的部位具有局限性。隨著大型計(jì)算機(jī)及工作站的出現(xiàn)
2017-12-10 06:56:411930 無人機(jī)折反射全景成像系統(tǒng)由無人機(jī)、折反射全景相機(jī)和數(shù)據(jù)處理單元等組成,如圖1所示。折反射全景相機(jī)成像可以獲得水平方向360°、垂直方向210°的大視場(chǎng)場(chǎng)景圖像。折反射全景相機(jī)通常置放于無人機(jī)機(jī)身正下方,但由于無人機(jī)兩側(cè)起落架的位置低于全景相機(jī),導(dǎo)致全景圖像始終出現(xiàn)該起落架,影響圖像的進(jìn)一步解讀。
2018-04-06 09:51:003832 本文主要研究飛機(jī)起降滑行過程中垂直方向上的非線性振動(dòng)特性并對(duì)其主系統(tǒng)(飛機(jī)機(jī)體)的振動(dòng)進(jìn)行時(shí)滯反饋主動(dòng)控制。首先對(duì)飛機(jī)機(jī)體和起落架建立二自由度非線性系統(tǒng)模型,并得到模型的運(yùn)動(dòng)微分方程組,坐標(biāo)轉(zhuǎn)換進(jìn)行
2018-01-29 14:12:520 值進(jìn)行優(yōu)化。結(jié)果表明,氣動(dòng)載荷的起落架冷氣收放系統(tǒng)仿真能較好模擬收放系統(tǒng)實(shí)際工作狀態(tài),且合理的節(jié)流孔孔徑能使起落架冷氣收放時(shí)間滿足飛機(jī)設(shè)計(jì)要求。考慮氣動(dòng)載荷的起落架冷氣收放系統(tǒng)仿真能提高仿真結(jié)果可靠性,為后續(xù)冷氣
2018-03-01 10:49:280 液壓能源系統(tǒng)是民用飛機(jī)的關(guān)鍵系統(tǒng)之一,通過液壓泵輸出-定壓力的液壓油液,為主飛控用戶、起落架用戶、高升力用戶和剎車用戶提供壓力能量,維持飛機(jī)的操縱。液壓油箱是民用飛機(jī)液壓系統(tǒng)的重要附件,其主要作用
2018-03-15 14:02:471 隨著對(duì)半主動(dòng)控制材料磁流變液研究的不斷深入,磁流變液阻尼器裝置的應(yīng)用變得更加廣泛。為了設(shè)計(jì)出性能更優(yōu)越的磁流變液減擺器裝置,根據(jù)磁流變液阻尼器的一般設(shè)計(jì)方法,對(duì)磁流變減擺器的設(shè)計(jì)流程進(jìn)行了研究,總結(jié)
2018-03-26 10:33:270 直-10的抗墜毀設(shè)計(jì)首先體現(xiàn)在該機(jī)粗壯的后三點(diǎn)式固定起落架上。現(xiàn)代武裝直升機(jī)普遍采用后三點(diǎn)式起落架設(shè)計(jì),這是因?yàn)榕c前三點(diǎn)式起落架相比,后三點(diǎn)式具有更好的地面滑行穩(wěn)定性,而且分置于前機(jī)身兩側(cè)的主起落架支柱可以被做得更加粗壯,有利于吸能。
2018-08-21 10:51:033042 最新照片也顯示出直-20有趣的尾輪設(shè)計(jì),其重型搖臂式緩沖支柱被夾在了兩片尾鰭之間,而不是像之前認(rèn)為的被安裝在尾鰭之下,這也是與“黑鷹”不同的設(shè)計(jì)。結(jié)合直-20的跪式吸能主起落架來看,該機(jī)在設(shè)計(jì)上很重視抗墜毀能力。
2018-08-23 11:40:3010474 目前伊朗也已著手研發(fā)兩類新型飛機(jī)。一種為渦輪螺旋槳飛機(jī),可搭乘12至19名乘客,裝有不可收回三點(diǎn)式起落架和高集成度的機(jī)翼,另一種則是借鑒IrAn-140客機(jī)研發(fā)的68至72座客機(jī)。為什么伊朗不找中國合作呢?
2018-08-27 14:47:175954 美國海軍陸戰(zhàn)隊(duì)的一個(gè)研究團(tuán)隊(duì)利用3D打印制造了F-35戰(zhàn)斗機(jī)起落架的一個(gè)部件,成本僅9美分,推廣應(yīng)用后可使每架F-35戰(zhàn)斗機(jī)維修成本降低70000美元。
2018-09-22 14:25:003754 10月10日?qǐng)?bào)道,在2018年美國陸軍協(xié)會(huì)(AUSA)年會(huì)上,德事隆公司展示了新的X5-55無人機(jī)驗(yàn)證機(jī)。與早期的型別相比,新展出的驗(yàn)證機(jī)修改了發(fā)動(dòng)機(jī)吊艙,螺旋槳部件和起落架。
2018-10-14 10:19:023174 Vukotich認(rèn)為,奧迪和其他準(zhǔn)備量產(chǎn)L3級(jí)自動(dòng)駕駛的公司都在押注他們的人機(jī)交互技術(shù)和能力。因?yàn)樽詮暮娇諛I(yè)誕生以來,事實(shí)是大約90%的飛機(jī)事故都是由于模式混亂引起的——當(dāng)飛行員不知道自動(dòng)駕駛儀是開還是關(guān),或者不知道飛機(jī)的起落架是升還是降。
2018-12-10 11:01:513964 多種商業(yè)航空智能飛行連接解決方案包括接地系統(tǒng)、座艙內(nèi)飾和機(jī)上娛樂系統(tǒng)、飛行控制與起落架系統(tǒng)以及推進(jìn)與配電方案。 今年正值TE進(jìn)入中國大陸市場(chǎng)三十周年。三十年來,TE引領(lǐng)行業(yè)創(chuàng)新,與中國航空工業(yè)共同成長(zhǎng),始終為智能互聯(lián)飛機(jī)保駕護(hù)航。航空電子設(shè)備
2019-02-07 20:06:01225 基 于脈寬調(diào)制( Pulse Width Modulation,PWM) 技術(shù)設(shè)計(jì)了多旋翼植保無人機(jī)變量噴灑控制系統(tǒng)。該系統(tǒng) 由硬件和軟件兩部分組成,硬件由多旋翼植保無人機(jī)起落架、變量噴灑控制
2019-03-19 08:00:006 ,競(jìng)爭(zhēng)對(duì)手道格拉斯已經(jīng)推出DC-9。在歐洲,則有法國南方飛機(jī)的“快帆”和英國飛機(jī)的BAC-111。這些成功的設(shè)計(jì)都采用尾吊雙發(fā)的布局,起落架高度降低、重量減輕,干凈的機(jī)翼氣動(dòng)效率更高,尾吊發(fā)動(dòng)機(jī)的噪聲也遠(yuǎn)離機(jī)艙主體。
2019-03-28 17:34:016732 、起落架及飛機(jī)復(fù)合材料結(jié)構(gòu)構(gòu)件等零部件研發(fā)、制造。在航空航天領(lǐng)域擁有完整的集成生產(chǎn)服務(wù)能力,涵蓋從設(shè)計(jì)到室內(nèi)測(cè)試和服務(wù)維護(hù)的各個(gè)階段。
2019-06-19 16:23:561377 最近,國外著名軍事愛好者網(wǎng)站EAST PENDULUM(東方鐘擺)首次公布了,某型艦載無人機(jī)前機(jī)身和前起落架進(jìn)行彈射試驗(yàn)的照片;該網(wǎng)站分析猜測(cè)認(rèn)為該艦載無人機(jī)可能為中航成都飛機(jī)工業(yè)公司(以下簡(jiǎn)稱成飛)研發(fā)的陸基“風(fēng)影”高隱身無人機(jī)的艦載改型。
2019-07-24 16:08:224420 飛機(jī)的交付將于2020年至2024年期間分階段完成,其中2020年交付3架ARJ21-700飛機(jī),2021年交付6架ARJ21-700飛機(jī),2022年交付8架ARJ21-700飛機(jī)、2023年交付
2019-09-02 15:29:321743 飛機(jī)的起落架結(jié)構(gòu)是重要的承載結(jié)構(gòu),不論是飛機(jī)著陸接地時(shí)的緩沖吸能作用,還是接地后為飛機(jī)剎車減速的作用,或是在地面支承和操縱飛機(jī)的作用,都體現(xiàn)了起落架對(duì)飛行安全有著舉足輕重的影響。
2019-11-16 10:33:09958 關(guān)于C919的血統(tǒng)卻一直是個(gè)爭(zhēng)議話題,有人認(rèn)為C919完全就是一個(gè)組裝平臺(tái),也有人認(rèn)為他就是自主化國產(chǎn),對(duì)此專門去查了下供貨商分布表,機(jī)頭機(jī)身機(jī)尾以及機(jī)翼等材料均是來自我國成飛沈飛以及西飛等,其他的關(guān)鍵部分都是來自國外企業(yè),例如發(fā)動(dòng)機(jī),航電,飛控,起落架等,不過C919依然是個(gè)國產(chǎn)化飛機(jī)。
2019-11-17 09:27:12620 為積極推進(jìn)民機(jī)智能制造進(jìn)程,新舟700飛機(jī)制造過程全面開展智能化技術(shù)創(chuàng)新。新舟700飛機(jī)工藝團(tuán)隊(duì)通過對(duì)三維工藝設(shè)計(jì)的研究及應(yīng)用,實(shí)現(xiàn)了飛機(jī)制造能力的提升和創(chuàng)新。
2019-11-22 11:41:171697 該系統(tǒng)依賴于嵌在起落架中的電動(dòng)機(jī),讓飛機(jī)能夠在發(fā)動(dòng)機(jī)不運(yùn)行的情況下向后推出并滑行,從而節(jié)省燃油、減少碳排放并避免因等待機(jī)場(chǎng)拖車而造成的延誤。
2019-12-05 11:36:52760 1933年5月,美國波音公司推出的波音247-D型飛機(jī),是世界上第一種真正意義上的現(xiàn)代客機(jī),采用了多種先進(jìn)技術(shù):其中包括全金屬半硬殼式結(jié)構(gòu)(含全金屬低翼結(jié)構(gòu))、全懸臂式單翼、可伸縮起落架、配平調(diào)整片、自動(dòng)駕駛儀、除冰帶,及兩個(gè)增壓風(fēng)冷發(fā)動(dòng)機(jī),及可控螺距螺旋槳。
2019-12-09 11:29:385331 新舟700飛機(jī)是首型采用電傳飛控系統(tǒng)的渦槳支線飛機(jī),飛控系統(tǒng)以國際民機(jī)研制標(biāo)準(zhǔn)ARP-4754A為導(dǎo)向,嚴(yán)格按照“雙V”流程開展設(shè)計(jì),將主飛行控制、高升力、自動(dòng)飛行系統(tǒng)整合在一起。
2019-12-10 14:15:406068 西飛民機(jī)集成交付中心專家翟釗平介紹,下一步他們將通過精準(zhǔn)的數(shù)字化對(duì)接,使首飛機(jī)機(jī)身整體成型,這是飛機(jī)部總裝階段的一個(gè)關(guān)鍵環(huán)節(jié)。首飛機(jī)機(jī)身三大部件的對(duì)接,使新舟700向著翱翔藍(lán)天又邁出堅(jiān)實(shí)一步。
2019-12-12 13:59:30752 起落架公司作為新舟700飛機(jī)機(jī)體結(jié)構(gòu)供應(yīng)商,于3月10日交付了鐵鳥起落架結(jié)構(gòu)用于靜力試驗(yàn)機(jī)。這是公司項(xiàng)目團(tuán)隊(duì)在疫情防控、復(fù)工復(fù)產(chǎn)“雙線作戰(zhàn)”中,贏下的繼新舟700飛機(jī)前起擺振研發(fā)試驗(yàn)件順利交付之后的第二個(gè)年度重要目標(biāo)。
2020-04-03 10:16:17720 據(jù)外媒報(bào)道,波音的戰(zhàn)斗無人機(jī)忠誠僚機(jī)(Loyal Wingman)首次將飛機(jī)的重量裝在輪子上并啟動(dòng)了飛機(jī)電源從而又取得了兩個(gè)里程碑式進(jìn)展。就在機(jī)身結(jié)構(gòu)組裝完成幾周后,該公司表示,這標(biāo)志著忠誠僚機(jī)的系統(tǒng)安裝、飛機(jī)起落架功能和集成測(cè)試取得了快速進(jìn)展。
2020-04-09 10:40:091159 飛機(jī)一般由機(jī)翼、機(jī)身、起落架和飛機(jī)操作系統(tǒng)組成,其結(jié)構(gòu)受力復(fù)雜,用以往的經(jīng)典工程分析進(jìn)行應(yīng)力分析已滿足不了現(xiàn)代飛機(jī)型號(hào)設(shè)計(jì)的要求,花費(fèi)的時(shí)間長(zhǎng),分析的部位具有局限性。隨著大型計(jì)算機(jī)及工作站的出現(xiàn)
2020-08-12 10:48:000 線束是電線和連接元件的組件,可在整個(gè)飛機(jī)上傳輸信號(hào)或電力。它包括發(fā)動(dòng)機(jī)、機(jī)身、起落架、機(jī)翼和許多其他功能。簡(jiǎn)而言之,它就像飛機(jī)的神經(jīng)系統(tǒng),在通信和電力傳輸中起著至關(guān)重要的作用,從而確保關(guān)鍵任務(wù)系統(tǒng)的正常運(yùn)行。
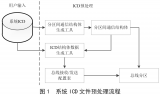
2022-11-17 11:16:15536 電子發(fā)燒友網(wǎng)站提供《物聯(lián)網(wǎng)的大規(guī)模IO——第一階段.zip》資料免費(fèi)下載
2022-12-23 15:24:222 質(zhì)量控制的首要要求,CASAIM尺寸測(cè)量全自動(dòng)掃描設(shè)備提供了航空大型復(fù)合構(gòu)件制造過程的質(zhì)量監(jiān)控、高效率的零部件全尺寸檢測(cè)等全過程的數(shù)字化檢測(cè)方案,實(shí)現(xiàn)對(duì)飛機(jī)蒙皮、肋板、起落架、大型架構(gòu)件、發(fā)動(dòng)機(jī)葉片、機(jī)匣、航空管件
2023-05-05 16:54:171203 
摘要:公差分析軟件,公差計(jì)算軟件,尺寸鏈計(jì)算軟件,尺寸鏈公差分析,尺寸鏈計(jì)算工具,尺寸公差分析軟件,尺寸公差軟件,尺寸鏈分析軟件
2023-08-17 16:54:24281 
該無人機(jī)基本機(jī)械結(jié)構(gòu)、起落架——用于起飛和著陸的起落架以及整個(gè)飛行控制系統(tǒng)以及用于演示機(jī)的航空電子系統(tǒng)都是自主開發(fā)的。其還將配備機(jī)載任務(wù)計(jì)算機(jī)、數(shù)據(jù)鏈、火控雷達(dá)、敵我識(shí)別系統(tǒng)和防撞系統(tǒng),原型預(yù)計(jì)在2024-25年完成。
2023-08-24 11:24:15812 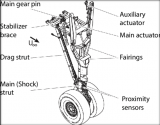
從消費(fèi)電子中手機(jī)的震動(dòng)馬達(dá)到航空領(lǐng)域飛機(jī)的起落架,從工業(yè)生產(chǎn)中常用的水泵、傳送帶,到汽車中的發(fā)動(dòng)機(jī)、電動(dòng)座椅、電動(dòng)車窗,電機(jī)在現(xiàn)代社會(huì)中的應(yīng)用十分廣泛,種類紛繁復(fù)雜,因此控制方法也各不相同。
2023-12-06 16:10:14524 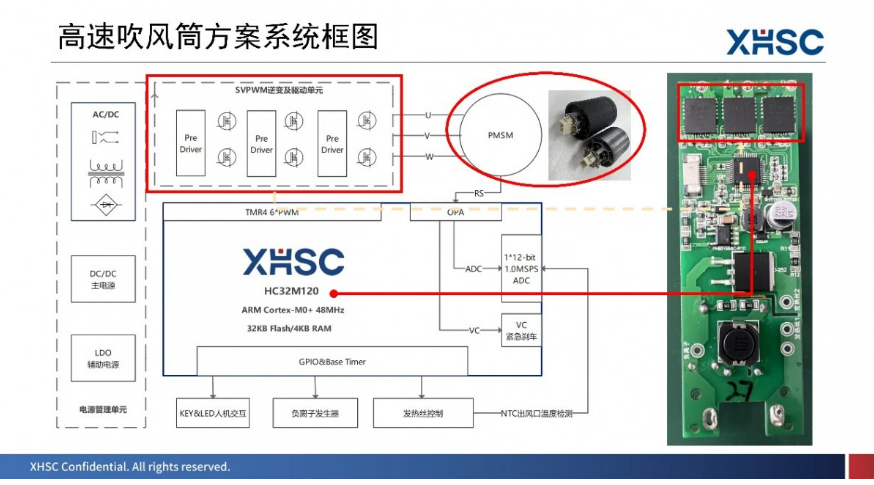
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論