 電子發(fā)燒友App
電子發(fā)燒友App


空中飛來不速之客,它可能是各種無人機,大到彩虹,小到只有手掌大;它們可以窺探要地布局,可以實時監(jiān)視目標,還可以投放傳單甚至炸彈,被敵對勢力利用,是公共安全的新隱患。
更常見到的是一些善意的無人機或是航模操控者,飛行器無意間飛入了民航起降空域,干擾了正常的航班起降;飛入了群眾聚會場所,一旦失控,將對公共安全造成危害;飛入重大活動、重大賽事現(xiàn)場,干擾了社會的正常秩序。這些是公共安全的新課題。
除了無人機干擾北京首都機場被擊落、美國白宮無人機事件、無人機飛越法國核電站等著名無人機負面新聞外,又有一些無人機的壞消息。2016年5月28日傍晚,距成都雙流國際機場東跑道十幾公里外的龍泉柏闔寺上空,有無人機在活動。因為事發(fā)在航班起降空域,東跑道被迫停航關(guān)閉達1小時20分鐘,這直接導致55個進出港航班延誤,嚴重擾亂了機場飛行秩序。肇事者至今沒有找到。
英國電訊報消息,據(jù)英國民航局的報告,在去年11月和今年4月間英國就有23起機場無人機事件,包括12起危險接近事件。
美國聯(lián)邦航空管理局自2015年8月到2016年1月,已經(jīng)收到了600起機場附近無人機的目擊報告。
民用無人機的防范正在被權(quán)力機構(gòu)重視,有關(guān)部門正在加強小慢低飛行器的立法管理,市場上也陸續(xù)出現(xiàn)了一些發(fā)現(xiàn)、預警、干擾、攻擊小慢低目標的反無人機系統(tǒng)。隨著法規(guī)的健全,防范手段的提升,小慢低目標的負面作用將會受到極大的削弱。
一,反無人機防御方案:被動監(jiān)測雷達(預警雷達)
該雷達對大疆等主流無人機提前發(fā)現(xiàn)、識別、預警,以便工作人員能盡快針對無人機采取管控措施,確保區(qū)域安全。
反無人機系統(tǒng)特點:■采用無線電識別和光學識別兩種方式,快速識別無人機
■自主研發(fā)無源雷達,實現(xiàn)8向360°全方位偵測
■采用高清激光攝像機(1080P),針對白天、陰天、夜間等場景,可快速識別無人機,自帶云臺,實現(xiàn)360°全方位探測
■最大識別范圍1000米
■無源雷達鍋防水防雷防塵,達到IP66以上標準,適合屋頂、墻頭、車載等應(yīng)用部署
■支持短信預警,及時通知相關(guān)人員
■支持視頻回放,播放發(fā)現(xiàn)無人機后,自動錄制的視頻
■工作溫度:-20°~60°
存儲溫度:-40°~70°
二,反無人機防御方案:主動無人機預警雷達
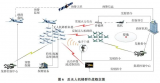
1、概述低空小目標探測與干預系統(tǒng)由低空小目標探測子系統(tǒng)、飛禽干預子系統(tǒng)和無人機干預子系統(tǒng)組成,可以對監(jiān)視區(qū)域內(nèi)的飛鳥、無人機進行探測、監(jiān)視、驅(qū)離、迫降。該系統(tǒng)具有集成度高、使用和維護成本低、全天時和全天候工作、目標自動識別等特點,可以廣泛應(yīng)用于機場或要地附近的空域安全防護。
低空小目標探測與干預系統(tǒng)
2、系統(tǒng)組成及技術(shù)指標
1)低空小目標探測子系統(tǒng)
低空小目標探測子系統(tǒng)由低空小目標探測雷達、光電探測設(shè)備和遠程監(jiān)控設(shè)備組成,用于對空域內(nèi)侵入目標的探測、監(jiān)視、識別、跟蹤和確認,并向干預子系統(tǒng)提供定向引導功能。
功能特點:
■系統(tǒng)對監(jiān)測空域6km范圍內(nèi)的鳥類、無人機等目標實施監(jiān)測;
■系統(tǒng)具有全空域360°覆蓋、全天時全天候工作等優(yōu)點;
■提供目標距離、方位、高度三維坐標信息;
■具備鳥類、旋翼無人機目標識別能力
性能指標:
■工作波段:Ku
探測威力:6km
■覆蓋范圍
方位:0°~360°
俯仰:0°~90°
■距離分辨率:1m
■掃描速率:24rpm
l功耗:5kW
2)功能及技術(shù)指標:
■作用距離:<1km
■工作頻段:2.4G-2.5G、5.7G-5.8G、890M-910M
■干擾樣式:噪聲干擾、點頻干擾、掃頻干擾等
導航信號干擾
■模式1:產(chǎn)生功率信號,壓制無人機的衛(wèi)星導航信號
■模式2:模擬生產(chǎn)GPS/BD信號,欺騙無人機的衛(wèi)星導航系統(tǒng)
■頻點:GPSL1、BDB1
三,反無人機防御方案:無人機干預子系統(tǒng)
無人機干預子系統(tǒng)通過發(fā)射通信頻段內(nèi)的同頻干擾信號,阻斷無人機與遙控器之間的數(shù)據(jù)鏈路;或發(fā)射無人機所在位置的衛(wèi)星導航欺騙信號,迫使其墜落、返航。
功能特點:
■具有壓制干擾、欺騙干擾和組合干擾方式
■可以逼真的模擬衛(wèi)星導航信號
系統(tǒng)工作過程
■系統(tǒng)首先由低空小目標探測子系統(tǒng)對監(jiān)視空域進行探測,一旦發(fā)現(xiàn)有物體侵入監(jiān)視空域,會立刻提醒監(jiān)控人員,并將侵入物體的類型、三維坐標、運動軌跡和運動速度等信息發(fā)送到遠程監(jiān)控設(shè)備。
■監(jiān)控人員可以通過遠程監(jiān)控設(shè)備對侵入物體進行遠程觀察并進行確認,然后選擇干預方式。
■如果是鳥類侵入防范空域,飛鳥干預子系統(tǒng)會根據(jù)探測雷達提供的三維坐標,向該方向播放聲波信號和警告提示,對鳥類進行驅(qū)散。
■如果是無人機侵入,則無人機干預子系統(tǒng)會向探測雷達提供的三維坐標方向進行信號干擾,迫使無人機墜落、返航、迫降。
四,反無人機防御方案:無人飛行器干擾系統(tǒng)
小飛行器干擾儀是我國安保領(lǐng)域急需的防務(wù)裝備,用于對低空慢速小目標如GPS定位飛行器、航模等進行軟殺傷性攔截(干擾),具有精度高、便攜、單兵操作、“綠色”發(fā)射等實用特點,廣泛用于重要會議、大型集會、重要場所等的安全防衛(wèi)。
功能
1)能有效干擾GPS定位飛行器、航模的遙控信號,使其不能遙控操作,達到偏離原飛行路徑(航跡偏離、跌落)的目的;
2)干擾飛行器用于無線圖像傳輸頻率,阻斷其傳輸途徑;
3)一旦發(fā)現(xiàn)非法航空器靠近、進入警戒區(qū)域,即對其實施定向干擾攔截(激光標定目標,隨之定向天線定向)。
2、技術(shù)指標
1)干擾頻段
■27MHz:26-28MHz海模/車模
■40MHz:40-41MHz海模/車模/空模
■72MHz:72-73MHz空模
■L1:1575.42±10MHzGPS
■B1:1561.098±2.046MHz北斗
■2.4GHz:2405-2483MHz圖傳遙控等
2)干擾距離
■GPS飛行器:不低于1500米
■遙控飛行器:干/通比大于3(遙控距離500米以內(nèi)的飛行器)
■電源
3)電池應(yīng)用
■連續(xù)發(fā)射不低于2小時
■候機時間不低于8小時
■220VAC交流連續(xù)工作不低于8小時
4)設(shè)備重量
■20Kg
5)尺寸
■56′35′23cm
6)操作方式
■通過設(shè)備配備的遠距離望遠鏡一旦發(fā)現(xiàn)非法航空器靠近、進入警戒區(qū)域,即對其實施定向干擾攔截(激光標定目標,隨之定向天線定向)。可單兵攜帶及操作。
五,反無人機防御方案:近中距無人機可見光識別跟蹤方案
1應(yīng)用場景
通過部署近中距無人機識別跟蹤系統(tǒng),在禁飛區(qū)等限制區(qū)域?qū)崿F(xiàn)近中距離無人機目標的檢測、識別、跟蹤和報警。
2系統(tǒng)介紹
2.1系統(tǒng)部署
無人機檢測識別系統(tǒng)部署方式如下:
(1)部署全景掃描攝像頭C1和放大跟蹤攝像頭C2;攝像頭C1、C2位置相對固定。
(2)C1攝像頭:該攝像頭為固定攝像頭,利用背景減除算法提取前景,檢測出無人機飛行疑似區(qū)域;
(3)C2攝像頭:該攝像頭為云臺式攝像頭,負責將無人機飛行疑似區(qū)域放大,并抓取圖像的中央成像;
(4)各類服務(wù)器:管理服務(wù)器、分析服務(wù)器、存儲服務(wù)器、報警服務(wù)器、配置服務(wù)器;
(5)管理客戶端。
2.2無人機識別、跟蹤方案
(1)C1攝像頭利用背景減除算法提取前景,檢測出無人機飛行疑似區(qū)域的圖像坐標(u、v);
(2)分析服務(wù)器利用C1估計得到的內(nèi)參參數(shù)計算偏轉(zhuǎn)角度P、T和倍數(shù)Z,并將P、T、Z傳遞給C2;
(3)C2攝像頭接收來自C1的P、T、Z信息,并讀取當前自身的P‘、T’、Z‘信息,計算兩者差值,需要轉(zhuǎn)動及拉伸的參數(shù)后控制云臺完成轉(zhuǎn)動,將疑似區(qū)域放大并在C2抓取圖像的中央成像;
(4)無人機識別:利用訓練得到的無人機模型檢測C2抓取的圖像中是否存在無人機,若存在則進行上報,或通知C1控制C2攝像頭繼續(xù)對目標進行跟蹤,若不存在則控制攝像頭復位;
(5)如識別發(fā)現(xiàn)無人機,則生成無人機報警信息,并存儲無人機跟蹤視頻。
■無人機識別、跟蹤流程圖
■系統(tǒng)架構(gòu)
■系統(tǒng)架構(gòu)圖
■系統(tǒng)由各類服務(wù)器、管理客戶端、固定攝像頭、云臺攝像頭組成。
■各服務(wù)器均具有守護進程,防止服務(wù)器程序運行時,因意外因素掉線后重啟。
■系統(tǒng)內(nèi)各服務(wù)器功能如下:
(1)管理服務(wù)器
■負責用戶請求的認證(用戶權(quán)限管理);
■管理、調(diào)度各服務(wù)模塊,保存管理數(shù)據(jù);
(2)分析服務(wù)器
■負責將前端設(shè)備接入平臺,轉(zhuǎn)換平臺與設(shè)備間的差異;
■負責視頻智能分析功能。功能包含:攝像頭診斷功能、基本智能分析功能、無人機識別跟蹤和視頻摘要等;
(3)存儲服務(wù)器
■針對報警消息,保存將前端設(shè)備的音、視頻信息到存儲介質(zhì)中;
■并提供文件轉(zhuǎn)發(fā)服務(wù),方便用戶查看;
(4)報警服務(wù)器
■負責將報警消息通過報警聲、報警燈、郵件、短信等方式通知管理人員;
(5)配置服務(wù)器
■完成系統(tǒng)中各個控制、服務(wù)模塊的配置,如人員管理、設(shè)備管理、計劃配置等工作。
2.3分析服務(wù)器
■分析服務(wù)器包含:無人機識別模塊、無人機跟蹤模塊、云臺控制模塊,分別完成如下功能:
■分析服務(wù)器架構(gòu)圖
(1)無人機識別模塊
■利用機器學習算法訓練得到的方法,針對目標區(qū)域檢測是否存在無人機,同時區(qū)分無人機與其他疑似目標,如飛鳥,云,飛機等。無人機樣本在前期進行采集并離線訓練。
(2)無人機跟蹤模塊
■發(fā)現(xiàn)無人機后,后臺跟蹤其運行軌跡。如有需要,在顯示界面畫出其運動軌跡;
■若無人機較遠(在顯示界面中小于*個像素),則調(diào)度云臺攝像頭進行跟蹤;
(3)云臺控制模塊
■控制云臺轉(zhuǎn)動,拍攝指定位置的目標。通過固定攝像頭中無人機所在位置,精確計算云臺轉(zhuǎn)動角度,并控制云臺轉(zhuǎn)動;
■如果目標在固定攝像頭中足夠大小,則可不調(diào)度云臺控制采集目標信息;
3擴展應(yīng)用
■該方案提出了一種通過攝像頭云臺聯(lián)動進行近中距離無人機識別跟蹤的一般方法。
■利用相同的架構(gòu),可以把云臺聯(lián)動擴展為一對多模式,進行公共場所的多目標跟蹤。
■為了節(jié)省成本該方法也適用于單云臺攝像頭模式,即確定了目標點后直接計算云臺需要轉(zhuǎn)動的PTZ,并控制云臺轉(zhuǎn)動,但在單攝像頭模式下要求物體移動的角速度不能過高,否則容易導致跟蹤始終滯后。
六,反無人機防御方案:便攜無人飛行器干擾器(反無人機槍)
1、設(shè)備組成及原理
設(shè)備由手持式主機和電池組組成。手持式主機為三頻段發(fā)射機天線一體化設(shè)計,可以同時產(chǎn)生2.4GHz/5.8GHz頻段無人機飛控干擾信號以及衛(wèi)星定位干擾信號,通過對無人機的上行飛控信道和衛(wèi)星定位信道進行阻塞式干擾,從而使其失去飛控指令和衛(wèi)星定位信息,使之無法正常飛行,根據(jù)無人機的設(shè)計不同會產(chǎn)生返航、降落以及墜落的管控效果。
HLD-FW16手持式無人機管控設(shè)備原理圖
2、設(shè)備技術(shù)指標
*管控頻率范圍:2.400~2.483GHz(頻段Ⅰ)
5.725~5.850GHz(頻段Ⅱ)
1.559~1.620GHz(頻段Ⅲ)
*等效全向輻射功率:
49dBmW(頻段Ⅰ)
43dBmW(頻段Ⅱ)
46dBmW(頻段Ⅲ)
*波束寬度:水平面27°垂直面23°(頻段Ⅰ)
水平面25°垂直面22°(頻段Ⅱ)
水平面28°垂直面26°(頻段Ⅱ)
*管控信號樣式:FHSS(跳頻)/DSSS(直接序列擴頻)
*管控距離:1公里(無人機距離遙控器200米,高度不低于30米時)
*工作時間:大于8小時(典型工況)
大于50分鐘(連發(fā)狀態(tài))
*體積:主機55mm(直徑)×404mm(長度)
天線最大寬度90mm
電池30mm×82mm×145mm
*重量:主機1.51kg電池組0.65kg
*設(shè)備組成:手持式主機1臺、電池2塊、充電器一個、腰帶式電池包1個、裝載箱一只。
責任編輯:gt









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論