 電子發燒友App
電子發燒友App


基于GPS的功角測量及同步相量在電力系統中的應用研究
針對GPS技術在電力系統中的廣泛應用,系統介紹了現有的發電機功角直接和間接測量方法,并分析了其優缺點;具體論述了基于GPS同步測量的同步相量在電力系統狀態估計,穩定控制,失步預測保護等方面的國內外應用發展情況。并指出基于同步相量的區域穩定控制理論還待進一步研究和突破。?
??? 關鍵詞:功角測量;相量控制;暫態穩定;狀態估計;全球定位系統
A Study of Power Angle Measurement Based on GPS
and Application of Synchronized Phasor in Power System
Long Houjun, Hu Zhijian, Chen Yunpin?
(Department of Electrical Engineering,Wuhan University,430072)
??? Abstract: Aimed at the application of GPS technology in power systerm,the paper introduces the power angle measurement methods,and analyses them virtues and shortcomings ;synchronized phasor based on synchronized phasor measurement is discussed in detail and the research results are also introduced in follows: status estimate,stability control,step-out predictive and protect etc. In conclusion,the paper points out that transient stability control theory based on synchronized phasor is still required further research and development.
??? Key words: Power Angle Measurement;Phasor Control;Transient Stability;Status Estimate;GPS
0? 引言
??? 從60年代美國開始進行空中定位研究,1974年基于GPS概念的全球定位系統開始正式研制,1985 85年進入民用領域,1993年此系統正式建成。 90年代以來基于全球同步衛星定位系統(GPS)的高精度定時技術逐步被引入電力系統。利用其時間誤差小于1μs,對于50Hz的工頻信號其相位誤差不超過0.018°的高精度時鐘從而實現對電網運行數據的實時同步采集,并可在此基礎上得到電壓電流相量和發電機功角這反映系統運行狀態的重要參數.
??? 電力系統中功角穩定性,電壓穩定性、頻率動態變化及其穩定性皆不是各自孤立的現象,而是相互誘發相互關聯的統一物理現象的不同側面,其間的關聯又受到網絡結構和運行狀態的影響。這其中母線電壓相量及發電機功角狀況是系統運行的主要狀態變量,是系統能否穩定運行的標志,如果它能被直接測量,不僅能用于調度中心的集中監視和控制,而且能用于分散的就地監視和控制,提高狀態估計的可靠性,更有可能完全實現電力系統的實時自動控制,解決系統的穩定問題。因此實時測量發電機的功角和母線電壓相量,將是電力系統穩定監視和控制的關鍵基礎。
??? 通過基于GPS實時相量測量,可以實時得到電網的狀態量,即可以得到實際系統精確模型的歷史數據和當前軌跡。由于相角涉及到電力系統的監視、控制和保護等諸多領域,而實時相量測量的實現,將推動電力系統的監視、控制和保護等新方法和理論的發展,為電力系統的穩定控制和保護開辟一個新的領域。
1? 功角測量
1.1 功角及功角測量
??? 功角表示發電機內電勢和端電壓之間的相位差,即表征系統的電磁關系,還表明了各發電機轉子之間的相對空間位置,而這恰好是判斷各發電機之間是否同步運行的依據。
??? 由于發電機的不同步運行或者系統振蕩,會危及發電機及變壓器甚至整個系統的安全,振蕩電流的持續出現,將使大型汽輪發電機定子過熱、端部遭受機械損傷,使大軸扭傷,縮短運行壽命。從電力系統安全穩定的客觀要求出發,發電機失步及失步預測保護十分必要。所以發電機轉子角度的獲得方法一度是許多學者積極探索的課題。
1.2 現有的功角測量方法
??? 1.2.1 間接測量法
??? 間接測量就是通過已知的參數,計算功角.
??? 傳統的做法是若已知橫軸同步電抗Xd(隱極機) 或Xq(凸極機),在測取電壓、電流及相應的φ角后,根據相應的矢量圖可算得功角[1]。?
??? 相似的,若已知Xd、Xq、X′d、X′q和X″q則可分別得到穩態、暫態以及次暫態狀況下的δ角。
??? 用該方法獲得δ角,必須滿足以下兩個條件:首先要求確定上述參數,并且這些參數要求非常準確;其次,在電力系統發生故障時和故障后,在具體的某一時刻應確定采用哪些參數(同步電抗、暫態電抗或次暫態電抗)、哪一種發電機等值模型進行計算,而實際上,這難以確定;該方法在穩態過程具有良好的測量精度,測量誤差小于1°,而在暫態過程中,采用暫態電抗或次暫態電抗計算出來的功角有一定的誤差,即使采用諸如FFT之類的信號處理手段也無法解決這一問題。而且測量計算時間太長,不適合實時穩控系統的實時測量。?
??? 文獻[2]提出利用基于GPS同步時鐘的相量測量裝置PMU來獲得系統中各主要站點的功角。Phadke博士開發的相角測量裝置,其測量原理是對三相電力線上的波形每個周期采樣12次,然后以遞推FFT提取出基波分量,最后用對稱法將三相組合起來產生正序相量,對應國際標準時間UTC產生一個絕對的相角。文獻[3]也是通過分析機端電壓的零序諧波分量來測量同步電機的轉子角。
??? 基于GPS同步時鐘的相量測量裝置PMU是在采樣電壓和電流后再經傅里葉變換才能得到發電機轉子角度,也較為耗時。?
??? 1.2.2 直接測量法
??? 利用轉子位置與空載電勢在相位上的對應關系,用轉子位置信號代替空載電勢參與相位比較。
??? 較早應用的是閃光燈法[4],是在被測試同步機的軸上裝一金屬圓盤,在圓盤上畫上與被測試電機的極對數相同的明顯的標記。當電機運行時,用閃光燈照射圓盤,閃光燈的電源來自被測試電機的端電壓,并將閃光燈置于同步檔,這時閃光燈的閃光頻率與被測試電機的轉速同步,看上去圓盤上的標記的位置靜止不動。在金屬盤的圓周外圍安裝一個靜止的圓弧形刻度盤,先確定被測試電機空載時標記的位置。當被測試電機帶負載后,再觀察標記位置相對空載時所偏移的電角度,這就是被測試同步電機的功角大小。這種方法比較直觀,但當被測試電機的極對數較多時其測量的準確度不高。
??? 相位計法[4]是在被測試電機的電樞槽口安裝幾匝細導線作為d軸位置的測量繞組,其極距應與該電機原有繞組一樣;或在被測試電機的軸上安裝一臺極數相同的,其d軸與主機重合的微型同步電機,以便獲得空載時電勢Eq的信號。將被測試電機的端電壓U經過移相器和空載電勢Eq的信號一起送到相位計。當被測試電機空載運行時,調節移相器,使相位計的指示為零,被測試電機帶負載后相位計的讀數即為功角δ之值。如果是采用帶有模擬量輸出的相位計,可測得與被測功角δ成正比的電信號,結合用光線示波器可拍攝功角δ變化的動態過程曲線。或者用微型計算機控制的數據采集系統,獲取功角δ變化過程的數據。這種方法實行難度大,因為電機改造絕非易事。
??? 數字式功角測量儀[4]是在被試電機的軸上裝一個投射式或反射式的光電圓盤,盤上均勻分布的孔數或黑白相間的標記塊數與被試電機的極對數p相等。當圓盤隨同步電機作同步速旋轉一周時,光電二極管產生代表Eq的矩形脈沖。由帶可調電阻的RC移相器給初始零相位的設定提供移相之用,即當被試電機為空載(δ=0)時,調節機端電壓U的相位使之與Eq同相,當被試電機帶負載時,輸出的脈沖寬度折算成的角度即代表被試功角的大小。實際上是通過獲得機端電壓與其空載電勢過零點的時間差,然后轉換成相應的角度,即采樣――相位檢測――時間差――顯示(即Φ=T),以測取功角。但是該方法僅僅給出了測量功角的一個方法,并不適于實時監視。因為測量功角要求有一個空載過程,以便取得實際測量時的Eq相量角度,在實際應用中特別是在實時檢測系統中,這是不現實的。
??? 磁阻位置傳感器法[5]通過磁阻位置傳感器來測量電機轉軸的位移獲得發電機空載電勢Eq矢量。設電機磁極為一對,利用電機轉軸裝有的60磁齒齒輪,由磁阻位置傳感器產生的信號頻率為50×60=3000Hz,當轉速為額定轉速時,將信號整形后經60分頻器即可獲得所需要的方波信號。首先進行一次空載過程,以獲取方波信號與從電壓側得到的方波信號相位之差,調整磁阻傳感器的安裝位置,直到上述偏差為零。帶負載后,所得差值即為功角δ。
??? 文獻[6]通過分析功角也為產生矢量E0的轉子主磁通和產生端電壓的合成磁通(由轉子磁通、定子電樞反應磁通和漏磁通合成)之間的相角,即測量轉子磁極中心線與合成的等效磁極中心線間的電角度來獲得功角。
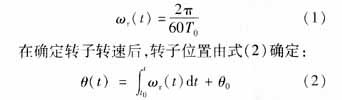
??? 無論汽輪發電機組還是水輪發電機組都裝有測速裝置,因此文獻[7]提出利用轉速表來測量功角。該裝置的構成是:在發電機的軸上安裝一個60個齒的齒輪,這60個齒大小完全一樣,均布在圓盤上。轉速表的測量電路負責檢測齒輪所發出的脈沖,每60個脈沖代表轉子旋轉一周。轉子的瞬時速度由下式表示(T0為兩個相鄰脈沖的時間間隔):
??? 只要已知轉子在初始時刻的位置θ0以及任意時刻的速度ωr(t),就可以準確地確定轉子在任意時刻的位置θ(t)。ωr(t)由轉速表負責測量,其測量精度與電力系統的穩定狀態無關,所以在正確確定θ0后,能通用于電力系統的任意狀態,并且也通用于汽輪發電機組和水輪發電機組。
??? 文獻[8]則提出利用轉子位置檢測器和發電機功角轉速測量裝置來直接獲得系統功角和轉速,進而監視系統穩定性。其中位置檢測器由同軸裝的3個圓盤組成,即發光盤、遮擋盤、光敏盤。光敏盤固定在定子上,遮擋盤與轉子為彈性連接并同軸旋轉。發光盤上裝有發光二極管,光敏盤上裝有光敏三極管,遮擋盤上有一個圓孔,當轉子帶動遮擋盤旋轉后,光敏三極管收到光信號的變化,呈導通和截止兩個狀態。文獻[9]也提出用發電機調速系統來直接測量發電機功角,是利用轉速測量裝置經分頻得到與Eq向量的頻率始終保持一致的正弦波,通過一定的算法與系統電壓比相,再對所得相角預校正求出發電機的功角。
??? 文獻[10]提出了兩種直接測量功角的方法:傳送波形的測量方法和利用同步時鐘的測量方法,并對兩種測量方法精度和誤差進行了分析。前者對通道的質量要求很高,要求調制解調器和傳輸通道在傳送過程中不發生波形失真。另外收端必須對對方傳送過來的波形進行時延和相移補償,而由于氣候、環境等因素的影響,時延和相移測量結果往往不很準確,這就嚴重地影響了功角測量的精度。如果利用兩個精度很高的同步時鐘即可避免上述問題。
??? 文獻[11]介紹了一種同步發電機功角的高精度測量方法。這種方法采用轉子位置傳感裝置和誤差軟件補償技術,并利用GPS高精度授時信號實現異地信息同步采集。用轉子位置信號代替空載電勢參與相位比較。轉子位置信號通過裝設轉子位置傳感裝置獲得。發電機功角可以通過測量轉子位置信號與發電機端電壓信號的相位差得到,其值等于空載時的相位差減去負載時的相位差。并對測量誤差的來源、性質及其軟件補償技術作了描述。
2? 同步相量的應用
??? 隨著基于同步技術的電網相角監測系統的采用,實時精確測量系統中各關鍵點的電壓電流相量, 使得人們能實時地看到系統的狀態,從而在電力系統中利用GPS同步相量實施相量控制這一電力系統穩定控制最直接的方法成為可能。
??? 相角測量可望在電力系統的狀態估計、靜態穩定的監視、暫態穩定的預測及控制和自適應失步保護方面發揮其作用[2,12,13]:?
??? 1) 應用PMU在電力系統做了很多試驗研究,如短路試驗[14]、切機試驗和甩負荷試驗、發電機失磁試驗[15]、線路的開斷試驗[16]等。通過PMU做的這些試驗,使人們首次看到了系統的動態行為,認識到了以往所沒有的現象和規律。對于動態電力系統建立的系統元件數學模型難以通過現場試驗進行驗證,數學模型的參數也很難準確確定,從而影響了數字仿真的精度和數學模型的適用范圍。基于PMU的同步相量提供了一種驗證數學模型和對其進行參數估計的基礎。并能應用于系統負荷模型的建立,系統等值等方面。?
??? 2)系統的狀態估計是一種數學方法,通常狀態估計是解系統的特征非線性方程求解,確定系統的穩定性,然而其計算時間比較長,難以在暫態過程中得到應用。若系統在所有節點安置相角測量裝置,它對電壓相量的狀態估計是一個線性估計或狀態確定;若系統在部分節點安置相角測量裝置并使系統可觀察時,它對電壓相量的狀態估計是一個線性估計。因此將同步相量值加入到現有的狀態估計中,可提高狀態估計的精度,做到實時運行。
??? 文獻[17]歸納了由同步正序電壓空間矢量族出發,網絡的狀態估計只需解線性代數方程,系統的動態狀態估計便可方便地實現。文獻[18]提出了稱之為使潮流方程直接可解的PMU配置方案。通過討論電壓型PMU的配置,目標是使潮流方程直接可解。電力系統結構的高度的稀疏性,因此有可能通過對部分節點適當配置PMU,即適當安排節點類型中PQVΘ節點和PVΘ節點的數量和分布,可使潮流方程按一定順序形成一種可解結構,形成一種非迭代的直接求解潮流方程的方案,進而可以獲得全部節點的電壓相量。并定量地分析引入PMU以后對狀態估計精度的改善程度。
??? 3)相角測量得到的同步相量能極大地改善系統穩定的預測及控制。
??? 調度中心可根據各個點的實時相角,建立全系統的實時相角集中監視系統,給調度員提供預防故障的措施或減少事故影響的補救辦法,根據相角信息可采取緊急措施(如切機、甩負荷、解列等),防止系統的崩潰。
??? 最常用的預測方法是在實測相角曲線的基礎上利用自回歸(AR)、多項式[19,20]或頻角關系等預測相對角度的軌跡,然后以角度大于某一限制值或依據預測模型的穩定性判斷系統的穩定性。但是其誤差隨預測長度的增加變大,在暫態初期,軌跡變化較劇烈時,預測精度更難保證。而且角度判穩的標準一般為統計值,其正確性缺乏理論證明。
??? 文獻[21]提出分段恒流等效法。基本思想是直接利用電力系統的詳細模型,用當前時刻的實測的電壓向量作為輸入,通過逐步積分法預測未來一段時間內系統的軌跡,在發電機角度變化的微小鄰域內假定負荷為恒流源,當發電機角度超出界限時,更新負荷的等效恒流源。
??? 文獻[22]提出的方法的基本思路是由發電機的同調特性在大量仿真觀察的基礎上根據功角對發電機進行離線預分群,在線動態修正。另外還有為自適應失步保護[23]提供出口動作啟動條件的穩定預測方法。它首先把系統等值成雙機系統,然后利用安裝在兩個區域間聯絡線變電站的相量測量單元(PMU)測量的電壓電流相量推算等值機的運行狀態,再利用等面積法則(EAC)判斷系統的穩定性,當發現系統失去穩定后該裝置可以分離失步區域。
??? 文獻[24]提出了基于同步相量測量單元的預測型振蕩解列方法。振蕩中心兩側母線電壓的相角差反映了功角差,利用該相角差的變化速度及符號,可以判定是同步振蕩還是異步振蕩以及滑差的情況,并實現預測解列功能。?
??? S.E.Stanton等人從部分能量函數[25]出發,分析多機系統中單機的能量,提出用PMU檢測發電機的轉速ω的最大數值,并和由能量函數理論通過離線仿真求得的轉速坎值比較決定切機量。
??? 較新的智能預測法采用模式識別、神經網絡和模糊推理等人工智能手段以實現暫態穩定的快速預測。如文獻[26]提出的決策樹法通過對不同運行方式和不同故障的仿真計算,僅使用機組的內電勢角度作為輸入,針對不同訓練機集組合構造多個決策樹。文[27]提出一種基于模糊神經網絡實時預測系統暫態穩定性的方案。但它采用PMU在故障切除后8個周波內的測量結果作為輸入,輸入數為發電機數的6倍,當系統規模較大時,訓練過程非常困難。文獻[28]提出基于模糊分類的徑向基網絡模型及算法,先利用無導師學習方法按照樣本的特性,對輸入樣本進行模糊分類,然后對各類樣本分別訓練徑向基網絡,進一步提高了訓練速度。利用同步相量測量裝置獲得的故障后短時間內各發電機的功角,經簡單運算后作為神經網絡的輸入,其輸出為多機電力系統穩定性的分類結果。
??? 另外,電壓穩定分析中的方法如潮流多解法、雅可比矩陣奇異、靈敏度分析法等,都需要不同程度的復雜計算,應用于電力系統實時控制時存在一定的困難。國內外一些學者直接利用電壓相量進行電壓穩定分析和實時控制已作了一定的工作,F.Cubina等人的研究[29]認為,即使在復雜系統中,電壓相量所含的信息足以確定電壓穩定的裕度,并推導出用電壓相量法來決定電壓崩潰的近似指標算法。文獻[30]提出了利用節點的實時信息:電壓相量、電流等和來自系統的準實時信息,將整個系統等值,導出了電壓穩定實用判據。文獻[31]提出了基于圖論的分簇算法和兩個相關性的判據,用一個節點測量的電壓相量代替整個簇的節點電壓相量,形成近似雅可比矩陣,求出最小奇異值作為電壓穩定近似指標,該方案已運用于實時控制中。文獻[32]提出了利用節點電壓相量計算的新的電力系統電壓穩定指標(VSI),計及網絡的不同拓撲結構,運用修改的圖論方法導出尋找最弱傳輸路徑的簡便算法。
??? 在暫態穩定控制方面,文獻[33]進行了基于GPS同步時鐘測量各發電機轉子的角度和速度,用它們作為信號對發電機進行非線性勵磁控制的研究,與取系統中一臺機為無窮大機的控制方法相比,將具有更優良的控制性能。
??? 電力系統實時相角測量系統能為集中控制提供相角信息,基于GPS的穩定控制只有針對多機大系統才能發揮其優勢,而多機系統穩定控制理論方法的滯后使得目前的電力暫態穩定在線控制的研究多是基于在線預決策或暫態安全分析,真正利用GPS同步監測系統提供的同步相量的同步相量區域穩定控制理論還待進一步研究。還可以將相量信息提供給就地控制使用,可以實現分散的暫態穩定控制。
??? 4)相角測量用于系統失步保護可以簡化參數的設計。應用測得的相角條件作為判據,能夠不必考慮故障的類型,設定參數非常容易。應用相角這個量必將會產生新的保護思想和裝置。文[34]針對發電機失步預測保護所存在的問題,介紹了一種基于功角直接測量的自回歸預測失步的方法,并在此基礎上提出了一套完整的保護方案。文[35]提出利用勢能概念的基于同步電壓電流測量相量的精確在線檢測失步技術。隨著電力系統互連網絡的增大,控制系統和保護越來越復雜,實時相角測量為電力系統的穩定控制和保護開辟了一個新的領域。
??? 5)靈活輸電系統(FACTS) 在提高線路輸送能力、阻尼系統振蕩、快速調節系統無功、提高系統穩定等方面的優越性能,而將相角測量裝置的實時相角送到FACTS中[36],可簡化其控制算法,從而得到更加靈活的控制。
3? 結束語
??? 利用GPS同步測量可以快速精確的獲得電力系統的歷史數據和實時狀態,GPS技術的應用必將對電力系統的安全穩定控制帶來革命性的變革,因此必然成為今后發展的重點;基于同步相量區域穩定控制理論的進一步研究,實時相角測量必將為電力系統的穩定控制和保護開辟一個新的領域。目前的技術條件已經基本滿足,當務之急是建立和發展以GPS為基點的電力系統安全穩定控制理論。









 工商網監
工商網監
評論