。敘述其基本工作原理。望能對(duì)廣大用戶(hù)在選型、使用、及整機(jī)改進(jìn)時(shí)有所幫助。 感應(yīng)子式步進(jìn)電機(jī) 感應(yīng)子式步進(jìn)電機(jī)工作原理(一)反應(yīng)式步進(jìn)電機(jī)原理由于反應(yīng)式步進(jìn)電機(jī)工作原理比較簡(jiǎn)單。下面先敘述三相反應(yīng)式步進(jìn)
2015-12-28 23:16:46
前進(jìn)一步,其輸出的角位移或線(xiàn)位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)形式和分類(lèi)方法較多,一般按勵(lì)磁方式分為磁阻式、永磁式和混磁式三種;按相數(shù)可分為單相、兩相、三相和多相等形式
2021-06-28 12:36:36
各位,能不能給一個(gè)反應(yīng)式三相步進(jìn)電機(jī)的程序看看,希望程序有注釋?zhuān)貏e是細(xì)分控制的注釋?zhuān)≈x啦!
2013-07-15 10:14:31
三相步進(jìn)電動(dòng)機(jī)建模及常用控制方法仿真根據(jù)三相反應(yīng)式步進(jìn)電機(jī)的結(jié)構(gòu)和電磁回路的特點(diǎn)做為基礎(chǔ)建立完整的仿真模型,對(duì)步進(jìn)電機(jī)的控制方法進(jìn)行的研究
2016-01-25 15:37:38
有的場(chǎng)合沒(méi)有三相電,只有單相電,手頭上的三相電機(jī)沒(méi)有電源可以使用,下面推薦兩種三相380V電機(jī)用單相220V驅(qū)動(dòng)的方法。
2021-01-26 06:14:57
STK984-091AGEVB,STK984-091A-E評(píng)估板是由前置驅(qū)動(dòng)器和功率MOSFET組成的三相BLDC電機(jī)驅(qū)動(dòng)器混合IC。它內(nèi)置了分流電阻和熱敏電阻。因此,它包含了針對(duì)過(guò)溫,過(guò)流,過(guò)壓和低壓的各種保護(hù)功能。您可以輕松設(shè)計(jì)BLDC電機(jī)驅(qū)動(dòng)電路并減少PCB面積
2020-05-20 06:09:29
`描述此參考設(shè)計(jì)展示了適用于采用 C2000? Piccolo? 微控制器和 DRV8412 三相電機(jī)驅(qū)動(dòng)器的旋轉(zhuǎn)三相有刷直流或單個(gè)步進(jìn)電機(jī)的電機(jī)控制解決方案。這一高度集成的穩(wěn)健電機(jī)控制和驅(qū)動(dòng)器
2015-04-29 13:41:05
三相直流無(wú)刷電機(jī)驅(qū)動(dòng)器硬件原理圖分享
2021-06-16 08:47:07
三相反應(yīng)式步進(jìn)電機(jī)原理是什么?無(wú)源電磁蜂鳴器原理是什么?
2021-12-23 06:59:48
圖7-20 (a)三相反應(yīng)式步進(jìn)電動(dòng)機(jī)工作原理圖A 相通電,A 方向的磁通經(jīng)轉(zhuǎn)子形成閉合回路。若轉(zhuǎn)子和磁場(chǎng)軸線(xiàn)方向原有一定角度,則在磁場(chǎng)的作用下,轉(zhuǎn)子被磁化,吸引轉(zhuǎn)子,使轉(zhuǎn)子的位置力圖使通電相磁路
2008-11-19 23:44:41
:**電機(jī)內(nèi)部的線(xiàn)圈組數(shù)。常見(jiàn)的有二相、 三相、 四相、 五相步進(jìn)電機(jī)。如果使用細(xì)分驅(qū)動(dòng)器,則“相數(shù)”將變得沒(méi)有意義,用戶(hù)只需在驅(qū)動(dòng)器上改變細(xì)分?jǐn)?shù),就可以改變步距角。**2.線(xiàn):**步進(jìn)電機(jī)有...
2021-06-29 09:05:38
哪幾種?步進(jìn)電機(jī)分三種:永磁式(PM) ,反應(yīng)式(VR)和混合式(HB)永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度 或15度;反應(yīng)式步進(jìn)一般為三相,可實(shí)現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5
2014-01-21 14:55:59
;B.采用帶有細(xì)分功能的驅(qū)動(dòng)器,這是最常用的、最簡(jiǎn)便的方法;C.換成步距角更小的步進(jìn)電機(jī),如三相或五相步進(jìn)電機(jī);D.換成交流伺服電機(jī),幾乎可以完全克服震動(dòng)和噪聲,但成本較高;E.在電機(jī)軸上加磁性阻尼器
2011-08-04 16:52:17
步進(jìn)電機(jī)5種驅(qū)動(dòng)方法的利弊分析 驅(qū)動(dòng)器技術(shù)的不斷發(fā)展,有恒電壓驅(qū)動(dòng)、高低壓驅(qū)動(dòng)、自激式恒電流斬波驅(qū)動(dòng)、電流比較斬波驅(qū)動(dòng)、潛進(jìn)式驅(qū)動(dòng)等驅(qū)動(dòng)方法。而這些驅(qū)動(dòng)方法各有各自的優(yōu)點(diǎn),也有各自的缺點(diǎn)。下面分析下
2016-01-27 14:45:02
`步進(jìn)電機(jī)的驅(qū)動(dòng)方式有整步,半步,細(xì)分驅(qū)動(dòng)。三者即有區(qū)別又有聯(lián)系,目前,市面上很多驅(qū)動(dòng)器支持細(xì)分驅(qū)動(dòng)方式。本文主要描述這三種驅(qū)動(dòng)的概述。 如下圖是兩相步進(jìn)電機(jī)的內(nèi)部定子示意圖,為了使電機(jī)的轉(zhuǎn)子
2011-02-17 09:24:31
時(shí)步進(jìn)電機(jī)的轉(zhuǎn)角,或是步進(jìn)電機(jī)轉(zhuǎn)一圈時(shí),步進(jìn)驅(qū)動(dòng)器輸入的脈沖個(gè)數(shù);其實(shí)這是步進(jìn)驅(qū)動(dòng)器帶來(lái)的功能,廠家標(biāo)注到步進(jìn)電機(jī)上了;這種標(biāo)注方法很容易造成迷惑,甚至有一些步進(jìn)電機(jī)的銷(xiāo)售商自己都講不清楚,我也是看到
2015-12-28 22:19:35
該步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直流電源供電。只要對(duì)步進(jìn)電機(jī)的各相繞組按合適的時(shí)序通電,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動(dòng)。圖1是該四相反應(yīng)式步進(jìn)電機(jī)工作原理示意圖。
2023-09-21 06:38:48
,同一種步進(jìn)電機(jī)既可配整、半步驅(qū)動(dòng)器也可配細(xì)分驅(qū)動(dòng)器,但運(yùn)行效果不同。步進(jìn)電機(jī)驅(qū)動(dòng)器按脈沖、方向指令對(duì)兩相步進(jìn)電機(jī)的兩個(gè)線(xiàn)圈循環(huán)激磁,這種驅(qū)動(dòng)方式的每個(gè)脈沖將使電機(jī)移動(dòng)一個(gè)基本步距角,即1.80度 (標(biāo)準(zhǔn)
2018-08-31 10:45:13
),選擇細(xì)分驅(qū)動(dòng)器是唯一的選擇。提高了電機(jī)的輸出轉(zhuǎn)矩。尤其是對(duì)三相反應(yīng)式電機(jī),其力矩比不細(xì)分時(shí)提高約30-40%。提高了電機(jī)的分辨率。由于減小了步距角、提高了步距的均勻度,“提高電機(jī)的分辨率
2020-06-25 08:00:00
就轉(zhuǎn)動(dòng)一個(gè)角度,因此非常適合于單片機(jī)控制。 步進(jìn)電機(jī)可分為反應(yīng)式步進(jìn)電機(jī)(VR)、 永磁式步進(jìn)電機(jī)(PM)和混合式步進(jìn)電機(jī)(HB)。 步進(jìn)電機(jī)區(qū)別于其他控制電機(jī)的最大特點(diǎn)是, 它是
2008-07-21 14:28:42
電機(jī)等。永磁式步進(jìn)電機(jī)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度或15度; 反應(yīng)式步進(jìn)電機(jī)一般為三相,可實(shí)現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動(dòng)都很大。反應(yīng)式步進(jìn)電機(jī)的轉(zhuǎn)子磁路由軟磁
2023-03-01 10:29:10
細(xì)分。步進(jìn)電機(jī)驅(qū)動(dòng)器的模式 步進(jìn)電機(jī)驅(qū)動(dòng)器有三種基本的步進(jìn)電機(jī)驅(qū)動(dòng)模式:整步、半步、細(xì)分。其主要區(qū)別在于電機(jī)線(xiàn)圈電流的控制精度(即激磁方式)。 1、整步驅(qū)動(dòng) 在整步運(yùn)行中,同一種步進(jìn)電機(jī)既可配整
2019-04-12 06:00:00
哪幾種?步進(jìn)電機(jī)分三種:永磁式(PM) ,反應(yīng)式(VR)和混合式(HB)永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度 或15度;反應(yīng)式步進(jìn)一般為三相,可實(shí)現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度
2012-07-14 21:13:39
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步進(jìn)角)。您可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到
2020-08-25 14:38:12
步進(jìn)電機(jī)最簡(jiǎn)單的驅(qū)動(dòng)方法,了解四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理 四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理-簡(jiǎn)介四軸步進(jìn)電機(jī)驅(qū)動(dòng)器,其實(shí)就是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。首先步進(jìn)驅(qū)動(dòng)器會(huì)接收到一個(gè)脈沖信號(hào),然后它按設(shè)定
2021-07-12 08:18:40
前言步進(jìn)電機(jī)是一種專(zhuān)門(mén)用于速度及位置精確控制的特種電機(jī),它旋轉(zhuǎn)是以固定的角度〈俗稱(chēng)步距角〉一步一步運(yùn)行的,故稱(chēng)為步進(jìn)電機(jī)。 ?步進(jìn)電機(jī)有反應(yīng)式 (VR)、永磁式(PM)、混合式(HB)三種
2021-07-08 09:34:00
步進(jìn)電機(jī)的驅(qū)動(dòng)與控制,步進(jìn)電機(jī)基礎(chǔ)(5.9)-步進(jìn)電機(jī)的驅(qū)動(dòng)與控制-三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路前言基本信息前言說(shuō)明5.9 三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路1 . 三相電機(jī)的驅(qū)動(dòng)方式三相步進(jìn)電機(jī)用驅(qū)動(dòng)器ICICIC
2021-07-08 09:06:00
。敘述其基本工作原理。望能對(duì)廣大用戶(hù)在選型、使用、及整機(jī)改進(jìn)時(shí)有所幫助。 感應(yīng)子式步進(jìn)電機(jī)工作原理(一)反應(yīng)式步進(jìn)電機(jī)原理由于反應(yīng)式步進(jìn)電機(jī)工作原理比較簡(jiǎn)單。下面先敘述三相反應(yīng)式步進(jìn)電 1、結(jié)構(gòu)
2018-10-12 11:07:38
, BYG是指混合式步進(jìn)電機(jī)(混合式步進(jìn)電機(jī)是綜合了永磁式和反應(yīng)式的優(yōu)點(diǎn)而設(shè)計(jì)的步進(jìn)電機(jī)。它又分為兩相、三相和五相,兩相步進(jìn)角一般為1.8度 ,三相步進(jìn)角 一 般為 1.2度 ,而五相步進(jìn)角 一
2021-07-07 06:05:42
工作原理比較簡(jiǎn)單。下面先敘述三相反應(yīng)式步進(jìn)電機(jī)原理。 1、結(jié)構(gòu): 電機(jī)轉(zhuǎn)子均勻分布著很多小齒,定子齒有三個(gè)勵(lì)磁繞阻,其幾何軸線(xiàn)依次分別與轉(zhuǎn)子齒軸線(xiàn)錯(cuò)開(kāi)。 0、1/3て、2/3て,(相鄰兩轉(zhuǎn)子齒軸
2014-01-11 14:49:42
步進(jìn)驅(qū)動(dòng)器細(xì)分控制原理是什么?步進(jìn)電機(jī)的相數(shù)與步進(jìn)電機(jī)細(xì)分的關(guān)系是什么?步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置細(xì)分的方法有哪些?
2021-10-27 06:23:18
說(shuō)明步進(jìn)電機(jī)的結(jié)構(gòu)和工作原理。圖7-20 (a)三相反應(yīng)式步進(jìn)電動(dòng)機(jī)工作原理圖A 相通電,A 方向的磁通經(jīng)轉(zhuǎn)子形成閉合回路。若轉(zhuǎn)子和磁場(chǎng)軸線(xiàn)方向原有一定角度,則在磁場(chǎng)的作用下,轉(zhuǎn)子被磁化,吸引轉(zhuǎn)子,使
2008-11-19 23:54:15
A4945和A4949三相電機(jī)驅(qū)動(dòng)器有哪些優(yōu)點(diǎn)?A4945和A4949三相電機(jī)驅(qū)動(dòng)器有哪些應(yīng)用?
2021-09-22 08:48:28
A5941是什么?A5941無(wú)傳感器三相電機(jī)驅(qū)動(dòng)芯片有哪些主要優(yōu)點(diǎn)?A5941無(wú)傳感器三相電機(jī)驅(qū)動(dòng)芯片主要有哪些應(yīng)用?
2021-08-27 07:43:59
單片機(jī)步進(jìn)電機(jī)控制器是什么?怎樣去制作一種單片機(jī)電動(dòng)機(jī)控制器?D306型號(hào)三相伺服混合式步進(jìn)電機(jī)驅(qū)動(dòng)器具有哪些特點(diǎn)?怎樣去使用D306三相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器?
2021-07-13 08:09:56
,對(duì)驅(qū)動(dòng)器要求不高,但高速力矩?fù)p耗大。所以用戶(hù)可根據(jù)要求來(lái)選擇四相八線(xiàn)的步進(jìn)電機(jī)接線(xiàn)方法。六線(xiàn)式步進(jìn)電機(jī)接線(xiàn)較為靈活,對(duì)使用人員技術(shù)要求較高,先通過(guò)萬(wàn)用表測(cè)量出哪三根為一組,并且需要判斷出中間抽頭,方法
2018-11-06 11:02:43
運(yùn)行時(shí)穩(wěn)定,噪音和發(fā)熱較小,對(duì)驅(qū)動(dòng)器要求不高,但高速力矩?fù)p耗大。所以用戶(hù)可根據(jù)要求來(lái)選擇四相八線(xiàn)的步進(jìn)電機(jī)接線(xiàn)方法。 六線(xiàn)式步進(jìn)電機(jī)接線(xiàn)較為靈活,對(duì)使用人員技術(shù)要求較高,先通過(guò)萬(wàn)用表測(cè)量出哪三根為一
2023-03-01 10:20:28
:八線(xiàn)式必須要組合成四線(xiàn)后再接到驅(qū)動(dòng)器上,組合時(shí)可以采用串聯(lián)或者并聯(lián),組合方法可以參照四線(xiàn)式接線(xiàn)圖。我們可以用四線(xiàn)式相同的方法分別將四組判斷出來(lái),但是很難判斷出哪兩組應(yīng)當(dāng)組合成一相,我們可以任取兩組
2023-03-01 10:14:15
無(wú)刷永磁伺服電動(dòng)機(jī)與三相感應(yīng)伺服電動(dòng)機(jī)的比較 思考題與習(xí)題第4章 步進(jìn)電動(dòng)機(jī) 4.1 概述 4.2 反應(yīng)式步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)和工作原理 4.3 反應(yīng)式步進(jìn)電動(dòng)機(jī)的靜態(tài)特性 4.4 反應(yīng)式步進(jìn)電動(dòng)機(jī)的動(dòng)態(tài)
2019-12-02 18:05:47
、步進(jìn)電機(jī)按轉(zhuǎn)子的結(jié)構(gòu)分三種:永磁式(PM),反應(yīng)式(VR)和混合式(HB)。圖1永磁式永磁式步進(jìn)電機(jī)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度或15度;價(jià)格便宜,精度差。圖2 反應(yīng)反應(yīng)式步進(jìn)
2022-05-26 13:58:40
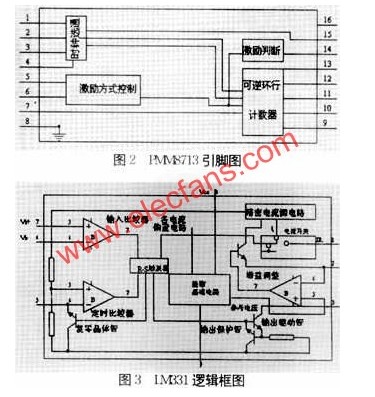
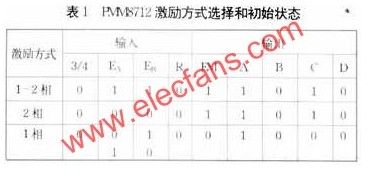
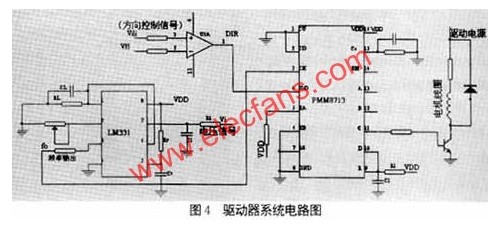
借鑒了網(wǎng)上的一篇論文,采用的是脈沖分配器pmm8713芯片,v/f轉(zhuǎn)換lm331芯片,lm324四運(yùn)功放,制作的三相反應(yīng)式步進(jìn)電機(jī)驅(qū)動(dòng)器,驅(qū)動(dòng)采用的單電壓串電阻驅(qū)動(dòng)方式,自己研究了下,還是糊里糊涂
2016-04-26 14:50:14
樣,得認(rèn)清女人的類(lèi)別,挑一類(lèi)自己好口的進(jìn)行針對(duì)性的進(jìn)攻這樣方可告捷啊。于是就百度啊google啊,得到以下結(jié)論:步進(jìn)電機(jī)分三種:永磁式(PM)、反應(yīng)式(VR)和混合式(HB)。永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩
2019-07-27 04:30:00
電機(jī)給出的值為0.9°/1.8°(表示半步工作時(shí)為0.9°、整步工作時(shí)為1.8°),這個(gè)步距角可以稱(chēng)之為‘電機(jī)固有步距角’,它不一定是電機(jī)實(shí)際工作時(shí)的真正步距角,真正的步距角和驅(qū)動(dòng)器有關(guān)。 步進(jìn)電機(jī)
2016-08-17 21:01:57
都會(huì)設(shè)有調(diào)節(jié)細(xì)分?jǐn)?shù)設(shè)置的開(kāi)關(guān),對(duì)照設(shè)置表?yè)軇?dòng)相應(yīng)的設(shè)置開(kāi)關(guān)就可以方便設(shè)置想要的細(xì)分?jǐn)?shù)。兩相步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置表會(huì)有2種形式,一種是細(xì)分?jǐn)?shù),另一種則是直接給出不同細(xì)分?jǐn)?shù)下每一圈所需要的脈沖數(shù)(一般是以
2023-03-13 14:16:17
的步距角是指電機(jī)每走一步的角度,一般市面上二相電機(jī)的步距角為0.9°/1.8°、三相的為0.75°/1.5°。3. 電機(jī)的尺寸三相的電機(jī)一般是大電機(jī),所以尺寸方面一般會(huì)比兩相的電機(jī)大,這也決定了三相步進(jìn)電機(jī)比兩相的運(yùn)行起來(lái)平穩(wěn)性更好。4. 力矩二相的電機(jī)的力矩相同尺寸會(huì)比三相的力矩稍微大些。
2021-07-08 07:56:56
交流伺服電機(jī)和步進(jìn)電機(jī)的原理區(qū)別步進(jìn)電機(jī)原理: 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)換成角位移的執(zhí)行機(jī)構(gòu),當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(步距角),它的旋轉(zhuǎn)是以
2021-07-12 08:55:51
摘要: 1、何為步進(jìn)電機(jī)和步進(jìn)驅(qū)動(dòng)器? 步進(jìn)電機(jī)是一種與專(zhuān)門(mén)用于速度和位置精確控制的特種電機(jī),它旋轉(zhuǎn)是以固定的角度(稱(chēng)為“步距角” )一步一步運(yùn)行的,故稱(chēng)步進(jìn)電機(jī)。其特點(diǎn)是沒(méi)有累積誤差,接收
2021-08-31 08:23:29
描述TIDA-01362 展示了如何使用無(wú)刷 (BLDC) 驅(qū)動(dòng)器的相同硬件結(jié)構(gòu)來(lái)驅(qū)動(dòng)三相步進(jìn)電機(jī)。通過(guò)調(diào)節(jié) PWM 信號(hào)方案,該設(shè)計(jì)可實(shí)現(xiàn)平穩(wěn)的正弦輸出電流。DRV8313 器件可用于實(shí)施此設(shè)計(jì)。主要特色平穩(wěn)的電流緊湊型設(shè)計(jì)低噪聲運(yùn)行開(kāi)環(huán)操作振動(dòng)極低,近乎于無(wú)
2018-07-13 02:44:51
推薦課程:張飛軟硬開(kāi)源:基于STM32的BLDC直流無(wú)刷電機(jī)驅(qū)動(dòng)器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd步進(jìn)電機(jī)驅(qū)動(dòng)電路圖一:二相步進(jìn)電機(jī)驅(qū)動(dòng)電路
2019-06-24 06:30:00
先開(kāi)心下。 我第一次到TI發(fā)帖感覺(jué) 頓時(shí)走進(jìn)了 大神圈 頓時(shí)與世界前沿接軌了好激動(dòng)。那么開(kāi)始正式的問(wèn)題DRV8301-HC-C2-KIT驅(qū)動(dòng)器 V103 這個(gè)驅(qū)動(dòng)器 支持的最高轉(zhuǎn)速 RPM 值為多少?查閱了相關(guān)所有文檔并沒(méi)有說(shuō)。另外求高手普及下 無(wú)刷三相 與 步進(jìn)電機(jī)的區(qū)別是什么?
2020-07-21 10:51:29
減速比等機(jī)械傳動(dòng)避開(kāi)共振區(qū);B.采用帶有細(xì)分功能的驅(qū)動(dòng)器,這是最常用的、最簡(jiǎn)便的方法;C.換成步距角更小的步進(jìn)電機(jī),如三相或五相步進(jìn)電機(jī);D.換成交流伺服電機(jī),幾乎可以完全克服震動(dòng)和噪聲,但成本較高
2018-08-28 15:36:30
控制器的輸出信號(hào)為雙脈沖,能否控制單脈步進(jìn)驅(qū)動(dòng)器驅(qū)動(dòng)兩相步進(jìn)電機(jī)?
2023-04-04 16:42:23
更廣泛的應(yīng)用。 同時(shí)步進(jìn)電機(jī)驅(qū)動(dòng)器也得到了很大的發(fā)展和改進(jìn)[2,3,4]。但是目前在工業(yè)應(yīng)用中,多數(shù)驅(qū)動(dòng)器體積較大,通用性不強(qiáng),往往要求外接多路電源,而且成本不低。為此,本文提出了一種單一電源輸入
2011-07-19 09:19:37
的工作原理 該步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直流電源供電。只要對(duì)步進(jìn)電機(jī)的各相繞組按合適的時(shí)序通電,就能使步進(jìn)電機(jī)步進(jìn)轉(zhuǎn)動(dòng)。圖1是該四相反應(yīng)式步進(jìn)電機(jī)工作原理示意圖。 圖1 四相步進(jìn)電機(jī)步進(jìn)示意圖
2008-10-21 00:38:58
分析了電腦繡花機(jī)系統(tǒng)中,現(xiàn)有的五相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器存在低頻轉(zhuǎn)矩振蕩、高頻輸出轉(zhuǎn)矩不足和多電源供電及不通用等諸多不足之處的基礎(chǔ)上,設(shè)計(jì)出一種基于單片機(jī)的通用型五相混合式步進(jìn)電機(jī)驅(qū)動(dòng)器.該驅(qū)動(dòng)器
2011-03-07 12:15:26
摘要:文章提出了一種結(jié)構(gòu)簡(jiǎn)單的用于兩相制步進(jìn)電機(jī)的控制驅(qū)動(dòng)器的設(shè)計(jì)。該控制驅(qū)動(dòng)器由L297步進(jìn)電機(jī)控制芯片與功率驅(qū)動(dòng)電路組成。L297芯片產(chǎn)生脈寬可調(diào)的脈沖相序信號(hào),該信號(hào)作為雙極性橋式功率驅(qū)動(dòng)電路
2010-12-15 11:21:33
如何驅(qū)動(dòng)三相橋式電路控制無(wú)刷電機(jī)
2023-10-28 06:13:06
設(shè)計(jì)要求控制風(fēng)扇的轉(zhuǎn)動(dòng)速度和方向。步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)換為角位移或直線(xiàn)位移的執(zhí)行機(jī)構(gòu)。通俗講,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),他就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(步距角
2021-07-07 06:37:21
怎樣去搭建一種三相無(wú)刷電機(jī)驅(qū)動(dòng)器的模型?如何對(duì)三相無(wú)刷電機(jī)驅(qū)動(dòng)器進(jìn)行仿真?
2021-07-21 06:45:45
可以分為反應(yīng)式,永磁式和混合式三種,目前反應(yīng)式的步進(jìn)電機(jī)效率低發(fā)熱大從而被淘汰了,混合式因?yàn)榻Y(jié)合了反應(yīng)式和
2021-07-08 08:32:48
無(wú)刷直流電機(jī)的工作原理是什么?無(wú)刷直流電機(jī)是有哪些部分組成的?怎樣去設(shè)計(jì)一種三相無(wú)刷直流電機(jī)典型驅(qū)動(dòng)電路?
2021-09-16 07:11:16
一般的Y形結(jié)構(gòu)有些不一樣,多了一個(gè)公共端引出來(lái)。邊上的兩個(gè)開(kāi)關(guān)是位置開(kāi)關(guān),通過(guò)它們可以知道閥門(mén)的開(kāi)合狀態(tài)。現(xiàn)在的問(wèn)題是,如何驅(qū)動(dòng)電機(jī)?本來(lái)想找一個(gè)現(xiàn)成的驅(qū)動(dòng)器,了解下來(lái),市面上的三相步進(jìn)電機(jī)驅(qū)動(dòng)器似乎都
2022-09-29 23:24:49
森創(chuàng)三相驅(qū)動(dòng)器,有一相沒(méi)輸出,電橋驅(qū)動(dòng)ic型號(hào)IR2136s,功率管IRGP4062D
2018-11-13 00:59:02
步進(jìn)電機(jī)基礎(chǔ)(8.4)-步進(jìn)電機(jī)的問(wèn)題解決方案-位置定位精度的解決方法前言基本信息前言說(shuō)明8.2 位置定位精度的解決方法1 . 驅(qū)動(dòng)電路的改善(1) 額定電壓(電流)驅(qū)動(dòng):(2) 2相激磁驅(qū)動(dòng):(3
2021-07-07 07:16:07
AN1315,用于三相電機(jī)驅(qū)動(dòng)的L6386 MOSFET功率驅(qū)動(dòng)器評(píng)估板。 L6386,用于三相電機(jī)驅(qū)動(dòng)的MOSFET功率驅(qū)動(dòng)器。三相演示板是用于評(píng)估和設(shè)計(jì)高壓柵極驅(qū)動(dòng)器L6386的參考套件。用戶(hù)
2019-07-03 09:22:07
STEVAL-IHM025V1,演示板是一種交流/直流逆變器,可產(chǎn)生三相波形,用于驅(qū)動(dòng)三相或兩相電機(jī),如感應(yīng)電機(jī)或高達(dá)1000W的PMSM電機(jī),帶或不帶傳感器。該系統(tǒng)代表了一種通用的,經(jīng)過(guò)充分評(píng)估
2020-05-29 16:34:29
怎樣去設(shè)計(jì)一種三相無(wú)刷電機(jī)驅(qū)動(dòng)器?如何對(duì)三相無(wú)刷電機(jī)驅(qū)動(dòng)器進(jìn)行仿真?
2021-07-21 06:21:27
三相正弦波發(fā)生器是應(yīng)用非常廣泛的信號(hào)源之一,通常可以由模擬以及數(shù)字模擬兩者相結(jié)合的方法產(chǎn)生。那么該怎么設(shè)計(jì)一種數(shù)模結(jié)合的三相正弦波發(fā)生器?
2021-04-12 06:12:40
三相步進(jìn)電機(jī)原理圖
2019-09-20 05:45:27
誰(shuí)有玩過(guò)三相步進(jìn)電機(jī),這電機(jī)的驅(qū)動(dòng)如何設(shè)計(jì)呀,求教一下。
2014-08-27 11:20:56
、太陽(yáng)能泵等許多終端應(yīng)用中,平衡成本與性能具有挑戰(zhàn)性。那么,節(jié)省材料清單(BOM)而又不犧牲系統(tǒng)性能的最佳方法是什么呢?下面列舉了一些方法:將高端和低端驅(qū)動(dòng)器結(jié)合到一個(gè)封裝內(nèi)。一個(gè)三相逆變器需要六個(gè)
2018-08-29 15:10:42
本文設(shè)計(jì)了一種適合三相反應(yīng)式步進(jìn)電動(dòng)機(jī)的高性能細(xì)分驅(qū)動(dòng)器,在功率驅(qū)動(dòng)中采用了大功率VMOS 器件,在細(xì)分環(huán)形分配器設(shè)計(jì)中采用了兩片GAL,使整個(gè)電路具有較高的運(yùn)行性能
2009-06-03 09:53:42 31
31 SJ-3C075M 三相反應(yīng)式步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)器:SJ-3C075M 驅(qū)動(dòng)器驅(qū)動(dòng)三相反應(yīng)式步進(jìn)電機(jī),該驅(qū)動(dòng)器采用原裝進(jìn)口模塊,實(shí)現(xiàn)高頻斬波,恒流驅(qū)動(dòng),具有很強(qiáng)的抗干擾性、高頻性能好、起動(dòng)
2010-01-09 10:13:1229 三相反應(yīng)式步進(jìn)電機(jī)驅(qū)動(dòng)器特點(diǎn):1. 15-36V直流操作電壓2. 1.5-4A相位峰值電流(按客戶(hù)要求設(shè)定)3. 半步驅(qū)動(dòng)4.鎖
2010-01-12 10:56:4764 SMD—530F-1五相反應(yīng)式步進(jìn)電機(jī)驅(qū)動(dòng)器特點(diǎn):1. 15-36V直流操作電壓. 2. 3A相位峰值電流3. 半步驅(qū)動(dòng)(0.36度)4. 鎖相時(shí)自動(dòng)減流6.
2010-01-12 10:58:1570 五相反應(yīng)式步進(jìn)電機(jī)驅(qū)動(dòng)器特點(diǎn):1. 15-36V直流操作電壓2. 3A相位峰值電流3. 半步驅(qū)動(dòng)4.鎖相時(shí)自動(dòng)減流5
2010-01-12 10:59:0660 摘要:對(duì)三相六拍反應(yīng)式步進(jìn)電機(jī)的受控交流模擬信號(hào)細(xì)分,給出了一種可變細(xì)分電源.文中介紹了電源的工作原理及驅(qū)動(dòng)電路和保護(hù)電路.使用該驅(qū)動(dòng)電源除可保持電機(jī)原有的性能外,
2010-06-29 13:08:3935
反應(yīng)式步進(jìn)電機(jī)PWM調(diào)速電路
反應(yīng)式步
2009-02-09 16:10:46 1584
1584 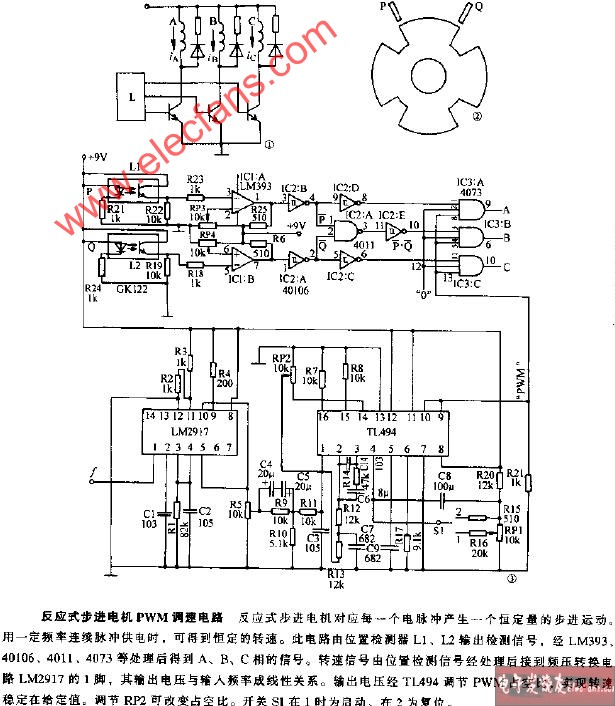
感應(yīng)子式步進(jìn)電機(jī)工作原理
(一)反應(yīng)式步進(jìn)電機(jī)原理由于反應(yīng)式步進(jìn)電機(jī)工作原理比較簡(jiǎn)單。下面先敘述三相反應(yīng)式步進(jìn)電機(jī)原
2010-01-09 15:09:451951 
基于STM32IPM模塊的三相步進(jìn)電機(jī)SVPWM驅(qū)動(dòng)器
2017-01-12 22:29:5636 步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化設(shè)備中。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€(xiàn)位移的開(kāi)環(huán)控制元件。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向
2018-04-25 10:59:1115746 一個(gè)步距角。這一線(xiàn)性關(guān)系的存在,加上步進(jìn)電機(jī)只有周期性的誤差而無(wú)累積誤差等特點(diǎn)。使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)來(lái)控制變的非常的簡(jiǎn)單。本文小編主要介紹的是反應(yīng)式步進(jìn)電機(jī)的結(jié)構(gòu)及工作原理,以三相及四相反應(yīng)式步進(jìn)電機(jī)為例子詳細(xì)解說(shuō)其工作原理。
2018-04-25 11:28:3531490 本文主要介紹了六款步進(jìn)電機(jī)驅(qū)動(dòng)電路圖。其中包括了二相步進(jìn)電機(jī)驅(qū)動(dòng)電路、三相反應(yīng)式步進(jìn)電機(jī)、4線(xiàn)步進(jìn)電機(jī)驅(qū)動(dòng)電路及LB1836M構(gòu)成步進(jìn)電機(jī)驅(qū)動(dòng)電路等。
2018-05-23 16:38:3656395 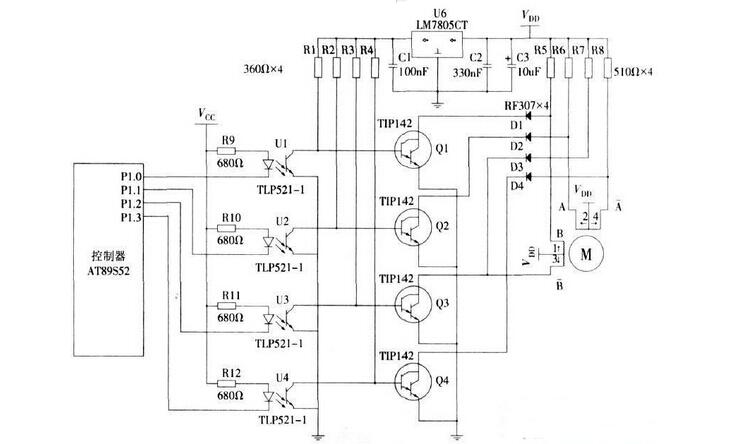
本文主要闡述了步進(jìn)電機(jī)驅(qū)動(dòng)器調(diào)速方法及步進(jìn)電機(jī)驅(qū)動(dòng)器的作用。
2020-04-20 09:10:2810073 步進(jìn)電機(jī)從其結(jié)構(gòu)形式上可分為反應(yīng)式步進(jìn)電機(jī)、永磁式步進(jìn)電機(jī)、混合式步進(jìn)電機(jī)、單相步進(jìn)電機(jī)、平面步進(jìn)電機(jī)等多種類(lèi)型。
2020-12-26 08:30:353527 應(yīng)式步進(jìn)電機(jī),是一種傳統(tǒng)的步進(jìn)電機(jī),由磁性轉(zhuǎn)子鐵芯通過(guò)與由定子產(chǎn)生的脈沖電磁場(chǎng)相互作用而產(chǎn)生轉(zhuǎn)動(dòng)。反應(yīng)式步進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)形式很多,按定轉(zhuǎn)子鐵芯的段數(shù)分為單段式和多段式兩種。 ? ?反應(yīng)式步進(jìn)電機(jī)
2021-08-04 09:42:255494 反應(yīng)式步進(jìn)電機(jī)與混合式步進(jìn)電機(jī)的區(qū)別如下:
1、在結(jié)構(gòu)和材料上不同,混合式電機(jī)內(nèi)部具有永久磁性材料,故混合式電機(jī)有自阻(即在電機(jī)未加電的情況下有一定的自鎖力),而反應(yīng)式電機(jī)沒(méi)有自阻。
2、在運(yùn)行性能上有差別,混合式電機(jī)運(yùn)行時(shí)相對(duì)較平穩(wěn),輸出力矩相對(duì)較大,運(yùn)行聲音小。
2023-03-27 15:42:33745 反應(yīng)式步進(jìn)電機(jī)的主要技術(shù)參數(shù)包括以下方面:
步角(Step Angle):指電機(jī)每接收一個(gè)脈沖,轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度。通常反應(yīng)式步進(jìn)電機(jī)的步距角為1.8度或0.9度,即每個(gè)步進(jìn)信號(hào)將旋轉(zhuǎn)電機(jī)的角度分別為1.8度或0.9度。
2023-03-27 15:56:231456 反應(yīng)式步進(jìn)電機(jī)和永磁式步進(jìn)電機(jī)都是常見(jiàn)的步進(jìn)電機(jī)類(lèi)型,它們的區(qū)別主要在于其工作原理和結(jié)構(gòu)。
反應(yīng)式步進(jìn)電機(jī)是利用異步電機(jī)的原理,將定子繞組分為兩個(gè)或以上繞組,同時(shí)用電子器件(如晶閘管)控制
2023-03-27 16:11:141509
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論