 電子發燒友App
電子發燒友App


繼續學習,繼續看書,繼續動腦子。
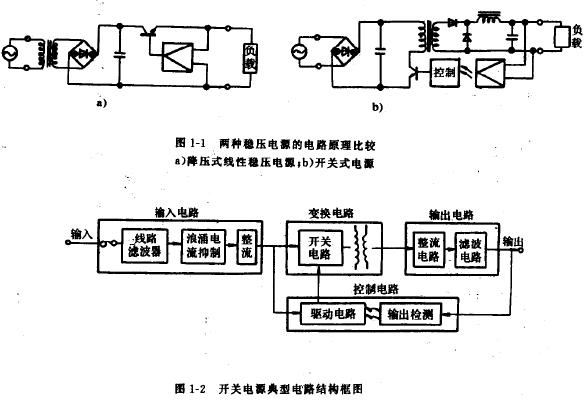
上期已經說明了開關電源滿足三個條件之后,可以看成是線性的了,那么這期就來看看開關電源的系統框圖。
一個坑
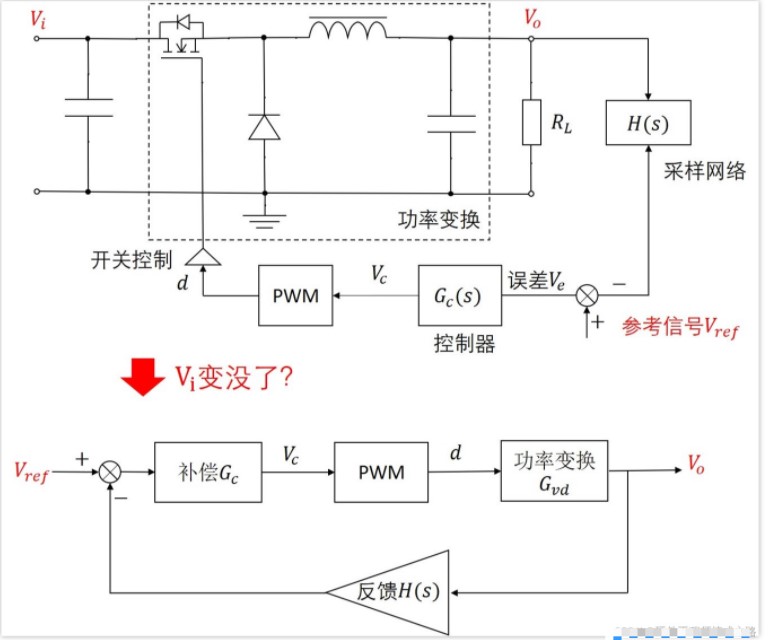
我一開始就掉進一個坑:系統框圖的輸入量為什么不是Vi,而是參考電壓Vref?參考電壓不是固定的嗎?也能作為輸入?
反饋控制系統的輸入量
我有這個問題,是因為我大學課表里面沒有《自動控制原理》,如果學過的話應該就不會有這個問題了。
開關電源是一個自動控制系統,采取的是反饋控制的方式,是一個反饋控制系統。
下面這兩段話是教材《自動控制原理》的,我挪過來直接用了。
1、反饋控制方式是按照偏差進行控制的,其特點是不論什么原因使被控量偏離期望值而出現偏差的時候,必定會產生一個相應的控制作用去減小或消除這個偏差,使被控量與期望值趨于一致。
2、加到反饋控制系統上的外作用有兩種類型,一種是有用輸入,一種是擾動。有用輸入決定系統被控量的變化規律,如輸入量;而擾動是系統不希望有的外作用,它破壞有用輸入對系統的控制。
仔細想想,對于我們的buck電源來說,我們的目的并不是說輸出Vo要隨電源Vi的不同而不同,而是不論輸入Vi是多少,都只有一個目的,那就是Vo恒定。
比如我們的5V轉3.3V的BUCK,是有反饋的,不管是因為什么變化,只要輸出電壓Vo偏離了3.3V,那么反饋Vfb與期望值Vref就會有偏差,然后系統就會根據這個偏差調節開關電源的占空比,讓Vfb朝著期望值Vref變化,最終的結果就是保證了輸出還是3.3V。總之,目的就是保證Vo時刻為3.3V。
總之,穩定狀態下,輸出是不變的,或者說系統時刻自動調節,向設定的輸出值而努力著。
可以想到,輸出量不變的原因,就是因為始終有一個不變的輸入量,這個輸入量就是Vref,它就是反饋控制系統的有用輸入。
那輸入電壓Vi是什么呢?
Vi我覺得可以理解為系統工作的條件,一個恒定不變的Vi輸入電壓,與系統的穩定工作時所處的狀態是有關系的。比如同一個3.3V輸出的BUCK電路,5V輸入和10V輸入,盡管都能輸出3.3V,也都是穩定工作的,但是所處狀態不同,占空比不一樣,傳遞函數也不同。
如果要類比的話,我覺得這個直流輸入Vi可以看作是靜態工作點。兄弟們可以體會下,靜態工作點是三極管的工作條件,然后輸入一般認為是交流小信號,三極管放大電路對應的放大倍數一般也是針對交流小信號說的。
另外一方面,現實中buck的Vi也會有噪聲,這些噪聲可以理解為擾動輸入,對應三極管電路的小信號。
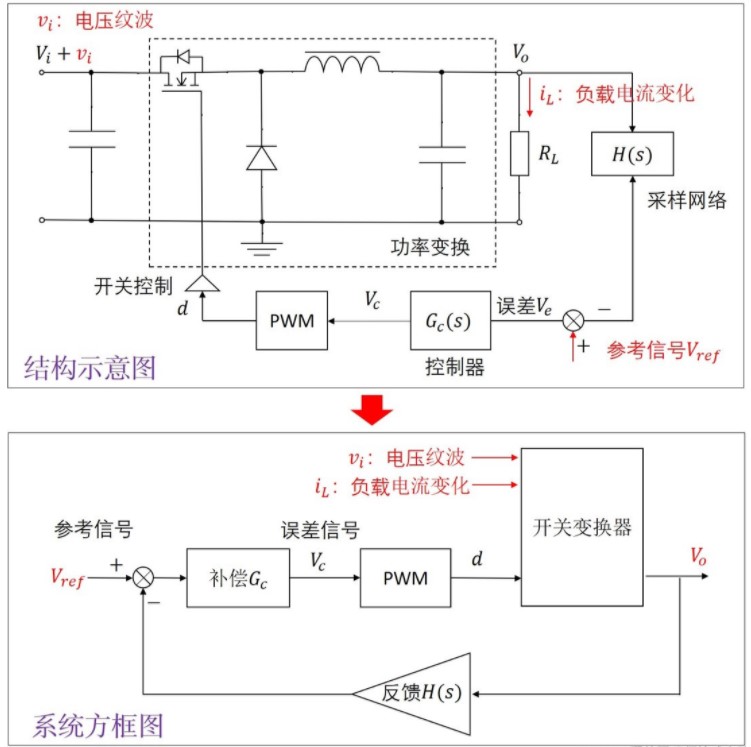
當然,開關電源的擾動可以有很多,常見的有Vi的電壓波動,還有負載電流的突然變化,它們也是現實電路中存在的。另外還有溫度上升下降,導致器件參數發生變化,外部輻射干擾等等。這些都可能會干擾系統運行。
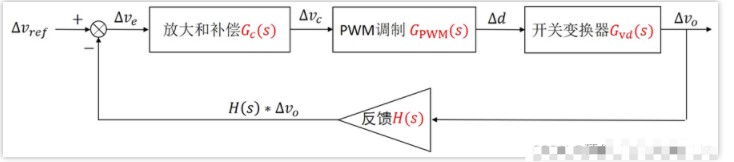
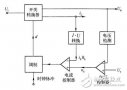
經過上面的分析,我們可以根據結構示意圖畫出系統的框圖如下:
當然,如果vi作為輸入信號已經在腦子里面根深蒂固了也沒關系。
我們就這么看,當輸入Vi突然發生變化,那么它必然會影響到Vo,Vo發生變化,那么Vref與反饋就有了差值,差值再通過補償電路得到誤差信號,誤差信號又去改變PWM占空比,進而調節開關變換器,讓Vo朝著目標值改變。
同樣的,如果負載電流突然發生變化,也會直接影響到Vo,同樣也是一級一級過來,系統會調節Vo朝著目標值改變。
仔細想想,這里面最關鍵的是不是下面這么一個環?
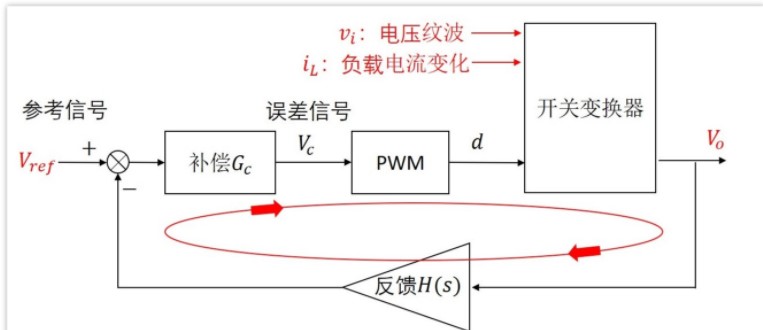
如這個環夠牛逼,不管輸入到系統的干擾有多強,輸入電壓怎么波動,負載電流怎么變,都能馬上準確無誤的調整出Vo為預設值,那這個系統就是鐵打的,金剛不壞。
但實際上,這顯然是不可能的,信號要一級一級的傳遞,總會有延遲。
比如剛開始時,如果Vi增大,那么Vo也增大,系統會往Vo減小的方向調整,但是因為調整需要時間,如果還沒調整完,Vi又減小了,系統又需要往反方向調整。這樣就有可能造成你需要我大時我減小,你需要我小時我又增大了,永遠都跟不上節奏,更甚者系統可能就崩了。
從上面一段話,我們應該可以看出2層意思:
1、系統的響應速度:有干擾信號進入系統時,系統調整需要時間,也就是有延遲,如果調整時間太長,那么響應速度必然就慢。
2、系統的穩定性:系統不管怎么樣,都不能崩了,導致振蕩Vo不能穩定吧
要準確的判斷一個系統怎么樣,肯定不能僅僅就靠這些文字描述,定性分析下完事,我們肯定要定量分析,那么就要拿出我們之前說的傳遞函數了。
系統框圖
我們去掉干擾輸入信號,只看最關鍵的環的框圖,然后評估這個環的性能就可以了。
最終畫出系統框圖如下:
可以看到,框圖的符合我又有了調整,都帶上了△符號,表示小信號,意思相對于穩態時的變化量。
之所這樣,是因為系統要線性化,必須有一個條件,那就是小信號假設,如果不明白,可以看上一期內容《開關電源環路學習筆記(2)-線性條件》
另外可能有2個問題:
1、Vref不是恒定的嗎?怎么還會有波動量△Vref呢?
2、干擾信號怎么沒了,扔掉了?
我是這么看的,干擾信號太多了,我們不可能列出所有的。
但是確認一點就是,任何干擾信號輸入,作用在系統上的結果都是讓Vo發生了變化,Vo經過反饋級和Vref做比較,得到誤差信號△Ve,然后系統根據這個誤差信號去做調整。
另一方面,誤差△Ve,它是Vref和Vo經過反饋網絡之后的信號相減得到的。
原本的系統Vref是不變的,干擾有輸入。現在假定沒有干擾,而Vref有變動的信號△Vref,效果應該是一樣的。反正它們都是相減的關系。
意思大致如下圖:
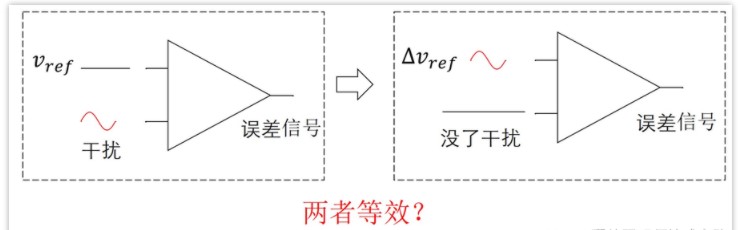
不知道對不對,極可能是胡說八道,請自行判斷。。。
框圖簡化
系統框圖已經有了,那如何分析呢?我們先把框圖簡化一下,這樣會比較簡單明了。
簡化其實就是將放大和補償級,PWM調制級,開光變換器這三級合并,它們會是相乘的關系,合并過程如下圖。
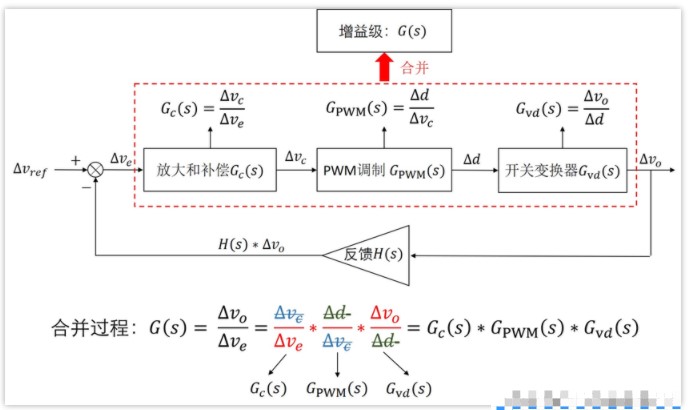
三級合并之后取個新名字,叫增益級G(s)。
簡化后的框圖
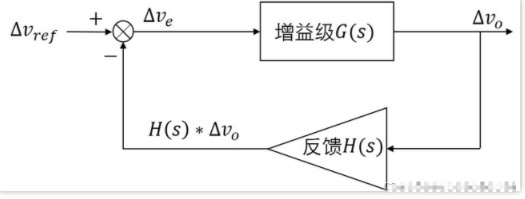
簡化后的框圖非常的清晰明了,我們可以分別寫出閉環傳遞函數和開環傳遞函數。
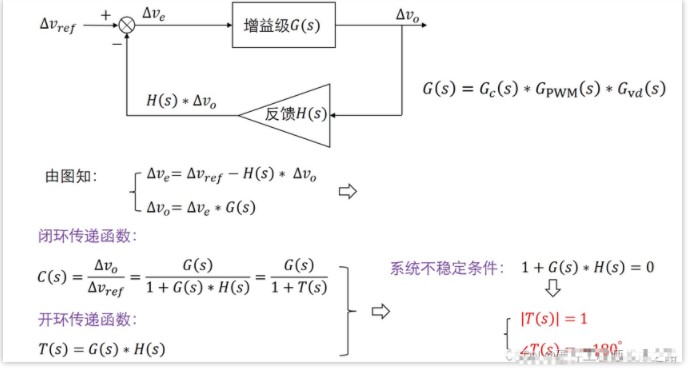
按道理來說,判斷系統穩不穩定,只需要分析閉環傳遞函數就可以了,顯然,傳遞函數分母為0的時候,意味著只要有一點點輸入信號,那么輸出信號就是無窮大的,即不穩定。
但是如果有一定經驗的話,就會知道,我們通常畫的波特圖并不是閉環傳遞函數C(s),而是開環傳遞函數T(s),這是為什么呢?
這是因為我們畫的波特圖通常是對數坐標,而開環傳遞函數的表達式就是各級相乘的關系,幅度取對數之后變成相加的關系,同時相位也是相加的關系。
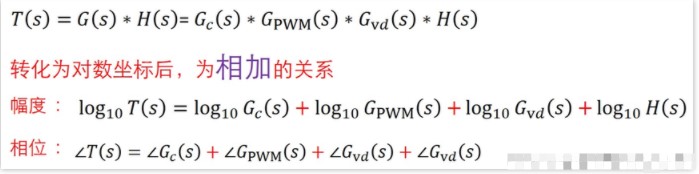
這對于分析問題來說簡直不要太方便,我們可以單獨分析各級的傳遞函數,就可以知道它們對整個系統所起的作用了。
而閉環傳遞函數取對數之后是這個:log(C(s))=log(G(s)/(1+T(s))),各級之間區分不開,難以分析。











 工商網監
工商網監
評論