 電子發燒友App
電子發燒友App


電磁爐檢鍋原理
電磁爐檢鍋一般采用2種,電流大小和脈沖數量。
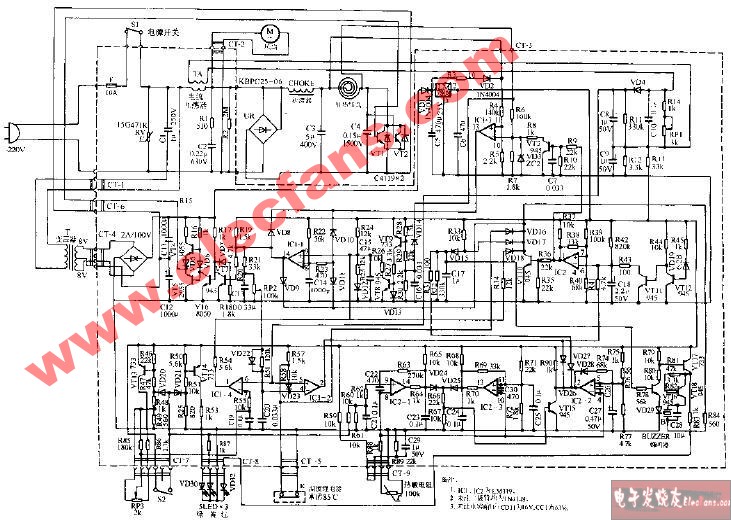
1 電流互感器檢鍋:
T1次級感應出隨初級電流大小而同步變化的電壓。經D3-D6全橋整流,C8濾波。電阻R1,R8,R11,VR1分壓,C9濾波后送到CPU相應功能腳上檢測。原理大致如下:
在無鍋具時,線盤和諧振電容震蕩時間長,能量衰減慢,流過T1初級電流較少,T1次級電壓就低,CPU判斷無鍋。有鍋具時,由于有合適材質的鍋具的加入,線盤和諧振電容之間的震蕩阻尼加大,能量衰減快,在T1初級變化的電流大,在次級感應出的電壓大,CPU判斷有鍋。
在某些電磁爐中,這種電路結構還可以完成過流檢測和過零信號檢測,大家應該看輸出的電壓送到CPU什么樣的功能腳上,區別開來。
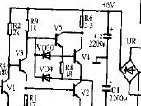
2 脈沖檢鍋電路:
IBGT的C極高壓脈沖經R10,R9,R41分壓后送到LM339內部的一放大器的反向輸入腳。而同向輸入腳由電源經過R49,R64分壓,輸入一固定的電壓。這樣就構成了一個比較器。在1腳輸出與6腳相位相反的同步脈沖送到CPU相應的檢測功能腳上。原理如下:
無鍋具時,線盤和諧振電容的自由震蕩時間長,能量衰減長。在單位時間內,脈沖個數少,在有鍋具時,由于鍋具的阻尼加入,能量衰減很快,單位時間內脈沖的個數就比無鍋具時要多很多。這樣在比較器的1腳也就輸出了同步的脈沖。CPU根據脈沖數量的多少來判斷是否有合適材質的鍋具。
這種電路結構電磁爐種還有很多,由于基準電壓的不同,輸出電壓送到CPU相應的功能腳上就完成不同的功能。大家要仔細區別。
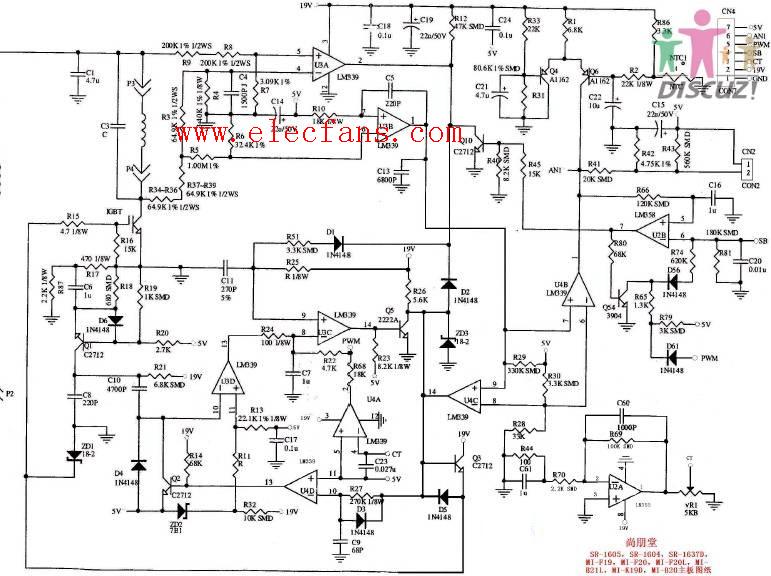
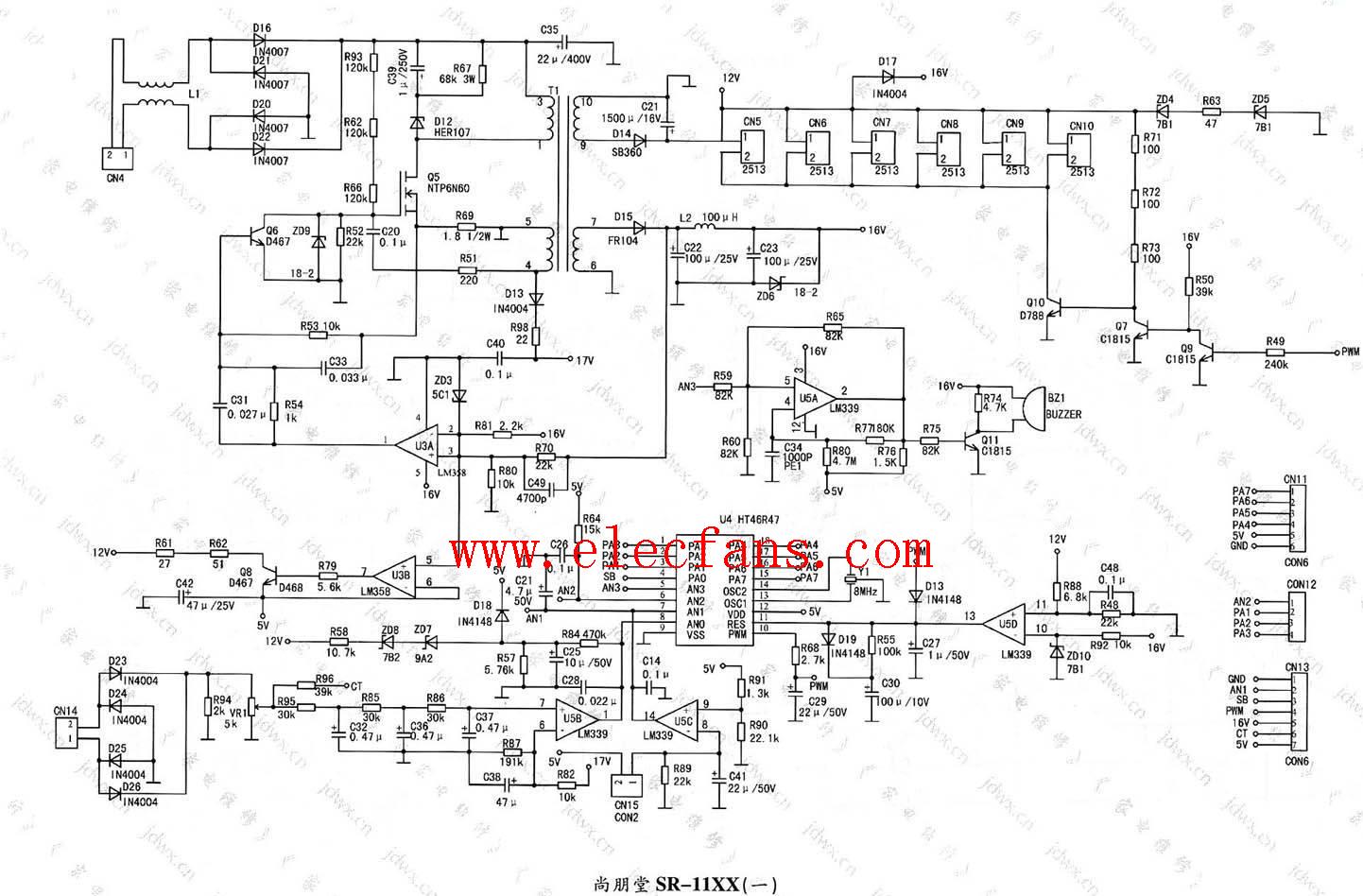
MI-F19,MI-F20,MI-F20L,MI-B21L,MI-K19D,MI-B20,SR-B20,SR-1637D
工作原理:
CPU的引腳及外圍電路
CPU的1腳(PA3)經R77為方波信號SB輸出。CPU的2,3,4腳接控制板的顯示部分。CPU的5腳輸出4KHZ的蜂鳴信號,經過R54,Q51驅動蜂鳴器。同時此信號也經過R53,D60,C56,R83,R82。Q52驅動風扇。CPU的6腳(AN2)為鍵盤操作的控制信號。也是AC電壓檢測判斷腳。CPU的7腳(AN1信號輸入)為IBGT,爐面溫度檢測信號判斷腳。CPU的8腳為鍋具檢測判斷腳。CPU的9腳接地。CPU的10腳為PWM脈沖輸出腳。CPU的11腳為復位腳。CPU的12腳為+5V電源。CPU的13.14腳為8MHZ晶振腳。CPU的15.16.17.18腳接控制顯示操作電路。
1,直流穩壓輸出電路
AC進來的電壓經變壓器T1變壓后,在次級輸出2組電壓,1組經D7-D10整流C55濾波后產生19V,另一組經D51-D54整流,ZD51穩壓C54濾波產生12V電壓供風扇工作,同時12V經Q56,Q53,R59,ZD56,C57后產生5V供CPU及整機的基準比較電壓。
2,鍋具檢測電路
R44對地取樣,經過R70,C60,R69,U2A信號放大,產生CT信號。同時進入R71-R73,C61-C53組成的RC濾波電路送入CPU的8腳,做鍋具檢測。
3,AC檢測
19V電壓(變壓器次級不經過穩壓的)經過ZD55,ZD52,R62,Q58穩壓后經過R52,R57分壓后進入CPU的6腳,作AC電壓的判斷。
4,溫度檢測電路
19V電壓經過R86,IBGT的NTC,分壓后經R2,C22送入Q6基極。NTC是負溫度系數的電阻,具有隨溫度升高阻值變小,溫度降低阻值增大的阻值的特性。溫度慢慢↑---V(NTC)慢慢↓---Q6基極電壓慢慢↓---Q6導通程度慢慢加升--Q6的CE結阻值也越來越小。19V電壓--R1--Q6的CE結--AN1--CPU的7腳,經過CPU內部比較判斷,控制CPU的1腳SB方波的輸出關閉,機器停止加熱。等溫度降低后,NTC阻值也恢復正常。Q6截止。CPU送出SB信號。
5,高壓峰值保護電路
IBGT的C極電壓經過R34-R39.R5.R6分壓后進入U3B的6腳。U3B的7腳通過R10接5V做基準比較電壓。正常時U3B的7腳電壓大于6腳電壓,在U3B的1腳輸出高電平(也就是U3B內部輸出電路處于截止狀態,+5V電壓經過R29進入U4C的9腳,U4B的7腳,不影響后級電路工作),但IBGT的C極電壓高時。U3B的6腳電位大于7腳電位。U3B的1腳內部電路導通(可以理解為輸出低電平),把U4C的9腳電位拉低。U4C的8腳電壓大于9腳電壓,U4C的14腳輸出低電平,ZD3電壓0V,Q3截止,D5導通。把IBGT的G極信號(VD信號)拉低,IBGT截止。
U3B的1腳信號同時還拉低了U4B的7腳電平,與6腳比較后在U4B的1腳輸出低電平經過R66把U2B的5腳電平拉低。U2B的6腳電平大于5腳,在7腳輸出高電平,經過R45,R40分壓后Q10導通。D1,D2的負極電壓等于Q10的結電壓近似0V。D1,D2導通。ZD3電壓0V,Q3截止,D5導通,IBGT截止。
6,IBGT同步檢測電路
線盤P3腳電壓經過R9,R8,R7分壓后進入U3A的5腳,線盤的P4腳電壓經過R34-R39,R3,R4,C4分壓進入U3A的4腳。但IBGT導通時,P3為+,P4為-,U3A的5腳電位大于4腳,在2腳輸出輸出高電平,D1,D2的狀態不影響,也就不影響各級電路的工作狀態,
當IBGT截止時,線盤P3為-,P4為+,U3A的4腳大于5腳電位,2腳輸出低電位,把D1,D2負極電位拉低,不論驅動脈沖是何種電平,ZD3的電壓都是0V,IBGT也就處于截止狀態。
7,電流保護電路
由U2A產生的CT信號經過可調節電阻VR1進入U4A的4腳。U4A的5腳接5V基準電壓,當4腳CT信號超過5腳電位時,U4A的2腳輸出低電平,把PWM信號短路。整機無輸出。VB1調節后的電壓送入CPU來判斷鍋具的大小及材質,以及CPU來判斷改變PWM的脈沖占空比。
8,SB信號和PWM脈沖混合整形驅動電路
方波信號SB從CPU的1腳輸出經R77.C20,R81進入U2B的6腳,與5腳做比較。當SB為低電平時,5腳電位大于6腳,U2B的7腳輸出高電平,經過R45,R40分壓,Q10導通。D1導通,C11放電,U3C的9腳電位降低,PWM信號經過R22和C7的積分電路后變成較為平滑的功率電平后輸入U3C的8腳。當9腳電位低于8腳時,U3C的14腳輸出高電位,Q5導通C極電位幾乎為0,無PWM信號輸出,IBGT截止。
當SB信號為高電平時,Q10截止,D1,D2截止,19V電壓通過R25向C11充電,隨著C11電壓的升高,9腳電位大于8腳,在U3C的14腳輸出不同占空比的脈沖,由Q5,Q3輸出到IBGT工作。
R17上的電壓經過Q1放大,C10偶合到U3D的10腳。19V電壓經R32,ZD2穩壓后進入U3D的11腳做基準電壓,同時利用SB驅動信號的變化來控制U3D的13腳,控制PWM信號的電壓高低。
在SB為低電平時,Q10導通,D2導通,U4D的10腳電位由于D2的導通電位降低。與U4D的11腳比較后在13腳輸出高電平。Q2導通,U3D的10腳電位大于11腳,13腳輸出低電位,拉低PWM信號電平。當SB驅動信號為高電平時,U3D的13腳輸出高電位,不影響PWM信號的大小。









 工商網監
工商網監
評論