 電子發(fā)燒友App
電子發(fā)燒友App


火災(zāi)危險無處不在.嚴(yán)重影響人類的生產(chǎn)、生活和生命交全,在對環(huán)境的危險程度未知的情況下,消防人員直接進入火災(zāi)現(xiàn)場進行偵察和滅火工作,是非常危險的。由具有感知能力、計算能力和通信能力的微型傳感器組成的無線傳感器網(wǎng)絡(luò),可以替代消防人員在危險的火災(zāi)環(huán)境中進行偵察工作,在火災(zāi)發(fā)生時,微型傳感器實時感知現(xiàn)場環(huán)境信息,并將環(huán)境信息傳送到后方,人們就可以不需進入現(xiàn)場而知道詳細的火災(zāi)情況。
1、用于消防系統(tǒng)的無線傳感器網(wǎng)絡(luò)
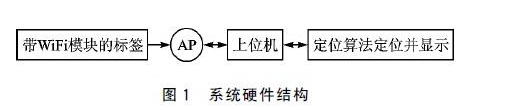
無線傳感器網(wǎng)絡(luò)是由一組傳感器以Ad Hoc方式構(gòu)成的無線網(wǎng)絡(luò),其目的是協(xié)作地感知、采集和處理網(wǎng)絡(luò)覆蓋地理區(qū)域中感知對象的信息。用于消防系統(tǒng)無線傳感器網(wǎng)絡(luò)中的傳感器接點應(yīng)該具有耐熱特性,并且對溫度具有敏感的感知能力,通過網(wǎng)絡(luò)覆蓋區(qū)域內(nèi)傳感器溫度的變化情況及其位置信息,實現(xiàn)對火情的實時監(jiān)控。此系統(tǒng)示意圖如圖1所示。這些接點完成通常的數(shù)據(jù)采集、計算以及互聯(lián)功能,它們通過傳感器網(wǎng)絡(luò)將信息傳送給網(wǎng)關(guān),網(wǎng)關(guān)對這些數(shù)據(jù)做出響應(yīng),并通過本地傳輸網(wǎng)絡(luò)送到遠端基站,基站通過互聯(lián)將數(shù)據(jù)傳送給數(shù)據(jù)庫服務(wù)器,最后數(shù)據(jù)通過終端界面?zhèn)魉徒o消防人員。
由于布置于火災(zāi)現(xiàn)場的傳感器網(wǎng)絡(luò)成本問題和節(jié)點能量十分有限,而且節(jié)點無法補充,因而不適宜每個節(jié)點都裝備高成本、高能耗的GPS設(shè)備,實際上,無線傳感器網(wǎng)絡(luò)中經(jīng)常采用分布式的節(jié)點定位算法。定位算法根據(jù)是否測量距離,可分為距離有關(guān)的和距離無關(guān)的2種。距離有關(guān)的通過測量距離角度等信息進行定位,對硬件要求較高且成本較高。受無線傳感器網(wǎng)絡(luò)硬件設(shè)施限制,相對于花費較高的基于距離的方法,距離無關(guān)機制被認(rèn)為是性價比較高的選擇。
2、DV—hop定位算法
DV—hop算法是一種距離無關(guān)的定位算法,由NICULESCU D等在Navigate項目中提出,適用于Ad—Hoc網(wǎng)絡(luò),并且在密集網(wǎng)絡(luò)中得到了大約射程范圍的1/3的精確度。在一個異構(gòu)網(wǎng)絡(luò)中,包含傳感器節(jié)點和錨節(jié)點。錨節(jié)點不僅可進行單級廣播,而且可把其位置信息廣播給整個網(wǎng)絡(luò)的所有節(jié)點。節(jié)點根據(jù)接收到的錨節(jié)點位置、錨節(jié)點的跳數(shù)和每一跳的平均距離計算出自己的位置。該算法的實現(xiàn)大致分為如下3個階段。
(1)距離矢量交換階段。在該階段中,DV—hop算法采用類似于經(jīng)典的距離矢量路由算法的機制,使得網(wǎng)絡(luò)中的所有節(jié)點都知曉其與各參考節(jié)點的跳數(shù)。為此,每個節(jié)點都維護著一個表{xi,yi,hi},其中,xi,yi為參考節(jié)點i的坐標(biāo),hi為該節(jié)點到參考節(jié)點i的跳數(shù)。在初始時,參考節(jié)點向鄰接節(jié)點廣播一個信標(biāo)(數(shù)據(jù)包),其中包含它的坐標(biāo)以及跳數(shù),其初始值為1。鄰居節(jié)點接收到信標(biāo)后,將跳數(shù)加1后繼續(xù)向它的鄰居廣播(除了來源方向),如此通過洪泛的方式向整個網(wǎng)絡(luò)傳播。如果某節(jié)點接收到來自相同參考節(jié)點的多個信標(biāo),則表明它到該參考節(jié)點有多條路徑。此時,節(jié)點將保留含有最小跳數(shù)值的信標(biāo),而忽略其他信標(biāo),這就保證了所得到的跳數(shù)值是它到參考節(jié)點的最短路徑。經(jīng)過這個過程,只要整個網(wǎng)絡(luò)是連通圖,網(wǎng)絡(luò)中的所有節(jié)點(包括參考節(jié)點)都能得到各參考節(jié)點的坐標(biāo),以及它到各參考節(jié)點的最短距離,也就是跳數(shù)。圖2中以單個參考節(jié)點為例,表示跳數(shù)在網(wǎng)絡(luò)中的傳播過程,其中圓形表示節(jié)點的通信半徑。
(2)校正值計算與廣播階段。該階段中,每個參考節(jié)點在獲得其他參考節(jié)點位置和相隔跳數(shù)后,計算網(wǎng)絡(luò)平均每跳距離,然后將其作為一個校正值廣播至網(wǎng)絡(luò)中,參考節(jié)點i的平均每跳距離,也就是校正值。其計算方法如下:
式(1)中,(xi,yi),(xi,yi)分別是參考節(jié)點i與j的坐標(biāo);hij表示參考節(jié)點i到參考節(jié)點j的跳數(shù)。
接下來,各參考節(jié)點進行第一次廣播,將其校正值以洪泛的方式在網(wǎng)絡(luò)中傳播。同樣,當(dāng)一個節(jié)點接收到了第一個校正值后,便丟棄所有后來者,這個策略確保了絕大多數(shù)節(jié)點從最近的參考節(jié)點接收校正值。這就意味著該校正值能夠比較真實地反映出該節(jié)點周圍的平均每跳距離。
未知節(jié)點接收到校正值后,便用校正值與跳數(shù)的乘積來近似代替它到各個參考節(jié)點的距離,最后進入第三階段的坐標(biāo)計算,即:
(3)坐標(biāo)計算階段。未知節(jié)點利用第二階段記錄得到各個信標(biāo)節(jié)點的跳段距離,利用三邊測量法或極大似然估計法計算自身坐標(biāo)。若未知節(jié)點u接收到n個參考節(jié)點的位置信息(x1,y1),(x2,y2),…,(xn,yn),并且在上述階段計算中到各參考節(jié)點的近似距離為d21,d22,…,d2n,則通過下列方程組得出未知節(jié)點u的坐標(biāo)從第一個方程開始分別減去最后一個方程,得:使用標(biāo)準(zhǔn)的最小均方差估計方法,可以得到節(jié)點u的坐標(biāo)為:
從第一個方程開始分別減去最后一個方程,得:
式(4)的線性方程可表示為:
使用標(biāo)準(zhǔn)的最小均方差估計方法,可以得到節(jié)點u的坐標(biāo)為:
只要ATA非奇異,節(jié)點u的坐標(biāo)X就有惟一解。
3、火災(zāi)現(xiàn)場定位原理
在火災(zāi)現(xiàn)場,火勢從火源開始向四周呈不規(guī)則的散射狀蔓延,在這個過程中,傳感器節(jié)點所在位置的可燃物經(jīng)歷了引燃、陰燃、明火燃燒、轟然、燃盡等燃燒過程,可按溫度變化劃分為燃燒前、燃燒中和燃燒后3個階段,溫度變化示意圖如圖3所示。從傳感器監(jiān)測到的溫度變化情況,可以判斷節(jié)點所在位置的火情:火勢是否正在逼近;是否開始燃燒;是否已經(jīng)燃燒完畢。在火勢蔓延區(qū)域,利用DV—hop算法獲得傳感器節(jié)點的位置信息,結(jié)合節(jié)點的溫度變化情況,就可以實時畫出火勢蔓延圖(見圖4),得知火場態(tài)勢。
4 、結(jié) 語
在此將無線傳感器網(wǎng)絡(luò)技術(shù)應(yīng)用于消防系統(tǒng),提出通過對傳感器節(jié)點的定位,結(jié)合節(jié)點處溫度變化情況,實現(xiàn)對火場環(huán)境的實時監(jiān)控。DV—hop算法只需要較少的錨節(jié)點,計算和通信開銷適中,不需要節(jié)點具備測距能力,是一個可擴展的算法。對于密集網(wǎng)絡(luò),平均每跳距離接近于實際距離,可以得到合理的平均每跳距離,從而能夠達到較高定位精度。而且,隨著感溫探測器技術(shù)的發(fā)展,開發(fā)工作環(huán)境溫度為一40~+900℃的傳感器節(jié)點已成為可能。因此,該技術(shù)在有效定位與跟蹤火源、火情上具有很好的可實現(xiàn)性和很高的應(yīng)用價值。
責(zé)任編輯:gt











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論