跳頻的實現 - 跳頻通信在汽車智能防盜器中的應用
nRF905 可以實現人工載波頻率控制,只需要修改nRF905 的RF 工作頻率寄存器的CH_NO 和HFREQ_PLL就可以選擇不同的載波頻率,實現跳頻。位變量HFREQ_PLL 為0,表示工作在430 MHz 頻段,頻道差為100 kHz;為1,則表示工作在868/915 MHz 頻段,頻道差為200 kHz。因此共有1 024 種通信頻率。通信頻率(H)為H=(422.4+(CH_NO)10/10)×(1+HFREQ_PLL)。
例如CH_NO=(001001100)2=(76)10,HFREQ_PLL=0,則H=(422.4+76/10)×(1+0)=430.0 MHZ。
本系統統一設置為工作頻段為430 MHz,頻道差為100 kHz,每一個頻點間隔為100 kHz,隨機數產生于0~128之間,跳頻帶寬為12.8 MHz,完成一次跳頻時間T≤800μs 。
3.2 基于跳頻通信遙控防盜器的可靠性設計及系統實現
3.2.1 生成隨機跳頻表增強安全性
為了增加安全性,每對密碼鎖除具有唯一對應的32 位加密地址外還增加了一一對應的隨機跳頻表,第一次使用時,將車機、人機對應的設置開關打開,人持終端可以產生一個隨機的跳頻表,并將該跳頻表通過握手頻率發送給車載終端,經返回校驗無誤時將該跳頻表存儲在掉電保護的非易失FLASH 存儲器中,關閉設置開關,在保證兩機有一一對應的跳頻頻率表的同時又很好地保護了頻率表的安全性,只要雙方按照事先約定的與跳頻表對應設置一致的CH_NO 和HEFREQ_PLL 的數值便可實現跳頻通信,增加了無線通信的可靠性、安全性。
3.2.2 設定握手及出錯、丟包回歸頻率,保證通信可靠
跳頻通信的一個突出問題就是盡管可靠性高,但一旦通信雙方通信錯誤,引發跳頻表讀取數據不一致, 系統將發生混亂,無法通信。為解決這一問題,提高防盜器安全性和可靠性,系統設定了一個固定頻率作為握手頻率,人機和車機之間的通信是先從一個雙方設定的握手頻率來進行握手連接,該頻率僅攜帶目標地址和握手請求或應答信號,即使被截獲也不影響系統的安全性。當系統出現問題雙方通信不成功時,馬上回到握手頻率,從跳頻表初始值重新開始通信。在一次指令信息傳輸進行過程中屏蔽中斷,保證信息的可靠傳輸。
3.2.3 系統工作過程
系統上電初始化跳頻表后,人機和車機都通過設定系統的工作模式(Set nRF905 Mode),配置nRF905 的寄存器(Configure Register),使其工作在握手頻率,接收模式(RX Mode)。當其中一端收到中斷請求時(車主指令/報警信息等),便發起握手請求,握手完成后,進行兩次跳頻通信過程,完成信息的發送及反饋,在發送過程中,發送方發出握手請求或指令后等待響應或反饋的時間不超過200 ms,否則便認為通信出錯,發起方重新發起請求。
以車主發出上鎖指令為例,系統整個工作過程如圖3,其他車主指令發送、車載報警信息的發送過程類似。
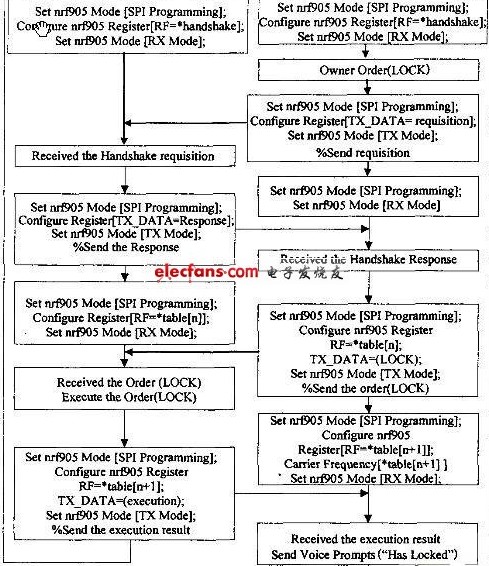
圖3 防盜器工作流程圖
4 結論
經測試該系統在小區內的可靠通信距離可達到150 m,滿足一般汽車防盜器的實際應用要求,采用跳頻通信保證了防盜器不易被截獲破解,通過通信方案的優化設計,保證了跳頻的通信可靠性,進一步提高了防盜器的安全性和可靠性。將該系統簡化外圍電路設計后也可用于摩托車防盜及其他防盜系統。
- 第 1 頁:跳頻通信在汽車智能防盜器中的應用
- 第 2 頁:跳頻的實現
本文導航
非常好我支持^.^
(1) 50%
不好我反對
(1) 50%
相關閱讀:
- [電子說] 基于TMS320C54X系列DSP實現跳頻通信網位同步方案 2021-06-14
- [電子說] 抗干擾慢跳頻通信系統的工作原理及實現應用設計 2021-05-19
- [物聯網] LoRa跳頻通信(FHSS)原理 使用擴頻技術的原因 2020-07-02
- [無線通信] 跳頻通信中的抗干擾同步算法研究 2011-08-23
( 發表人:彭菁 )