跳頻通信在汽車智能防盜器中的應用 - 全文
引言
隨著社會經濟的發展,人們生活水平的提高,汽車已逐步進入家庭,而如何有效防止汽車被盜也成為車主比較關心的問題。目前在汽車防盜器中,普通的電子遙控防盜器由于價格便宜占有很大的市場分額。但普通的電子遙控防盜器多為固定載波頻率通信,容易被干擾、截獲和破解。有報道說一般的遙控鎖在30 s 內就可被專用的解碼器復制,1 min 內就可破解。普通的電子遙控防盜器多為單向通信,車主可以遙控汽車上鎖、解鎖,但汽車信息不能及時反饋給車主。
?????? 為解決現有普通汽車電子防盜器采用固定頻率通信容易被破解及復制的問題,利用具有載波頻率調制功能的射頻收發芯片nRF905 設計了一款新的防盜器,該防盜器在通信過程中不斷改變通信頻率,使信息無法被干擾或截獲,防盜器很難被復制、破解,通過通信方案的優化和程序設計增加了跳頻通信的可靠性,增加的雙向通信功能使車主能及時掌握汽車狀況及報警信息,并通過多傳感器檢測電路的設計增加了防盜器的可靠性,經測試達到了良好的防盜效果。
針對普通電子防盜器的不足,我們將軍事通信中應用的跳頻通信技術應用到汽車智能遙控防盜器的設計中。在通信過程中不斷改變雙方的通信頻率,使信息傳遞難以被跟蹤、干擾或截獲、破解,將有效提高防盜系統的安全性和可靠性。
1 系統總體方案設計
系統由車載終端、人持終端兩部分構成。車載終端主要完成人機控制指令的接收執行,執行汽車上鎖解鎖指令,并完成對汽車防盜信息的檢測發送;人持終端主要完成車主對汽車的上鎖、解鎖的控制指令的發送,并接收車載終端發來的汽車相關報警信息及指令執行情況信息。系統功能結構如圖1 所示。
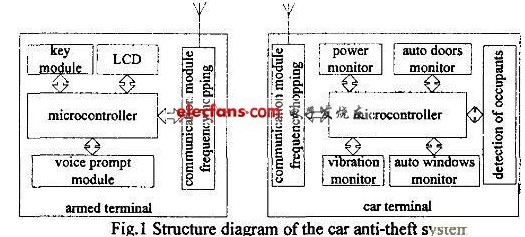
圖1 系統總體結構框圖
2 系統的電路設計與實現
2.1 車載終端的電路設計
車載終端主要完成汽車防盜信息的監測并將汽車異常狀況信息發送給車主,接收執行人持終端控制指令如對汽車上鎖解鎖等,針對目前防盜器主要依賴振動傳感器檢測盜竊信息存在不可靠的問題,設計了多信息融合的傳感器電路,通過監測車門、車窗、車座位來提高防盜器的可靠性,增加的備用電源管理功能保證防盜器在主電源線被剪的情況下仍能正常工作,主要由主控MCU 模塊、無線跳頻通信模塊、汽車門窗監測、電源監控、振動檢測、車內是否有人監測模塊構成。
2.1.1 主控MCU 模塊電路
主控MCU 主要負責整個系統的協調控制,傳感器信息的檢測處理,跳頻通信模塊的配置、信息發送接收等,采用C8051F340 實現。C8051F340 是美國Cygnal 公司的混合信號系統級集成芯片, 具有與8051 兼容的高速CIP-51 內核,片內集成了數據采集和控制系統中常用的模擬、數字外設及其他功能部件,內部時鐘頻率可達到48 MHz。具有增強型的SPI 接口,可方便實現對nRF905 的控制。
2.1.2 跳頻通信模塊硬件電路
跳頻通信模塊硬件電路采用Nordic 公司推出的單片射頻收發器芯片nRF905 實現,其功耗非常低,以–10 dBm的輸出功率發射時電流只有11 mA,在接收模式時電流為12.5 mA,傳輸距離大于100 m。工作于433/868/915 MHz3 個ISM 頻道(可以免費使用)。nRF905 可以自動完成處理字頭和循環冗余碼校驗的工作,可由片內硬件自動完成曼徹斯特編碼/解碼,使用SPI 接口與微控制器通信,配置非常方便,性能可靠,并可以實現人工載波頻率控制,具有128 個可選頻點,頻點間隔100 kHz,頻點切換時間為650 μs,可快速實現頻點切換。使用該芯片可構成無線跳頻通信的收發模塊,模塊電路及單片機接口電路如圖2,通過PWR_UP,TRX_CE 和TX_EN 與單片機連接實現工作模式配置。通過CD,AM,DR 進行載波檢測、地址檢測、中斷檢測,通過SPI 接口與單片機通信實現載波頻率、通信指令數據格式的配置及數據的接收。
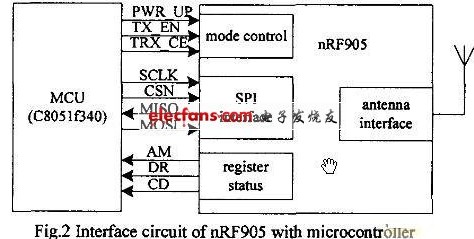
圖2 nRF905 與單片機接口電路
2.1.3 車門車窗監測模塊
通過將光電檢測二極管置于車門車窗關口,當車門或門窗沒有鎖緊時,對應的光電檢測電路會檢測到相關信息,在車內無人時車載終端通過汽車主控接口通知汽車微處理系統啟動自動關門關窗電路,并提醒車主車門或車窗沒有鎖好,在防盜狀態下車門車窗被打開則發出報警信號。
2.1.4 車內有無人檢測模塊
通過放置在汽車座位下的應變電阻設計的壓力測量裝置,判斷車內是否有人,如車內無人,車防盜鎖系統未啟動,則延時1 min 自動上鎖;若汽車防盜鎖啟動狀態下,如若有人,即有可能是有人盜車,防盜器立刻進行報警。
2.1.5 車外振動檢測模塊
車外振動檢測用來檢測當車處于防盜狀態時,是否有人對汽車進行碰撞,如有則報警。它采用了振動傳感器Z04B,它是一種高靈敏振動模塊, 能檢測極其微弱的震動波;安裝簡便,不受任何角度限制;抗干擾性好,對外界聲響無反應,具有抗雷電及鞭炮干擾能力,輸出為瞬態脈沖,用來構成可靠的汽車振動檢測模塊。
2.1.6 電源測控模塊
設計了備用電源管理功能,在汽車主電源被剪斷時,備用電源供電并將該情況反饋給車主,提高防盜系統的安全性和可靠性。
2.2 人持終端的電路設計
人持終端完成對汽車的上鎖、解鎖等控制指令發送,并接收車機發來的汽車相關信息,如振動情況、車門車窗開關情況信息,并發出語音提示。由主控單片機電路和跳頻通信模塊、人機接口模塊構成,其中主控單片機電路和跳頻通信模塊與車載終端部分相同。
人機交互接口模塊電路主要由按鍵電路完成人操作指令的發送,采用LCD 液晶顯示電路使操作更為方便,采用ISD1820 設計語音提示電路進行報警提示及車載終端指令執行情況提示。
3 系統的軟件設計與實現
3.1 nRF905 的配置過程及跳頻通信的實現
3.1.1nRF905 的配置過程
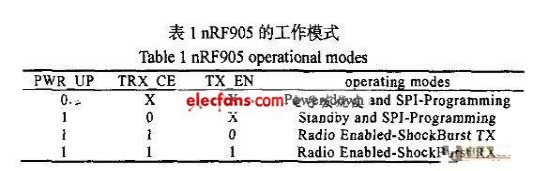
如圖2 所示,nRF905 通過CPU 控制nRF905 的3 個引腳PWR_UP,TRX_CE 和TX_EN 的高低電平來決定其4種工作模式(如表1所示),通過nRF905 的CD,AM,DR 三個引腳進行載波檢測、地址檢測、中斷檢測,在表1中的前兩種模式下,MCU 通過SPI 接口配置nRF905 的5 個內部寄存器(狀態寄存器、射頻配置寄存器、發送地址寄存器、發送數據寄存器、接收數據寄存器)。其中狀態寄存器包含數據準備好引腳狀態信息和地址匹配引腳狀態信息;射頻配置寄存器包含收發器配置信息,如頻率和輸出功能等;發送地址寄存器包含接收機的地址和數據的字節數;發送數據寄存器包含待發送的數據包的信息,如字節數等;接收數據寄存器包含要接收的數據的字節數等信息。
表1 nRF905 的工作模式
3.1.2 nRF905 的無線收發過程
1) 發射模式設置及過程
a) 上電以后MCU 首先配置nRF905 模式,先將PWR_UP,TX_EN,TRX_CE 設為(10X)配置模式。
b) MCU 通過SPI 將RF 寄存器的頻率配置數據,配置數據移入nRF905 模塊。
c) 當MCU 有數據需要發往規定節點時,接收節點的地址(TX-address)和有效數據(TX-payload)通過SPI 接口傳送給nRF905。
d) MCU 設置TRX_CE,TX_EN 為高啟動傳輸。
e) nRF905 內部處理:無線系統自動上電、數據包完成(加前導碼和CRC 校驗碼)、數據包發送(1000kbps,GFSK,曼切斯特編碼)。
2) 接收模式
a) 上電以后MCU 首先配置nRF905 模式,先將PWR_UP,TX_EN,TRX_CE 設為(10X)配置模式。
b) MCU 通過SPI 將RF 寄存器的頻率配置數據,配置數據移入nRF905 模塊。
c) 設置TRX_CE 高,TX_EN 低來選擇RX 模式,nRF905 監測空中的信息。
d) 當nRF905 發現和接收頻率相同的載波時,載波檢測(CD)被置高。
e) 當nRF905 接收到有效的地址時,地址匹配(AM)被置高。
f) 當nRF905 接收到有效的數據包(CRC 校驗正確)時,nRF905 去掉前導碼、地址和CRC 位,數據準備就緒(DR)被置高。
g) MCU 設置TRX_CE 低,進入standby 模式(待機模式)。
h) MCU 可以以合適的速率通過SPI 接口讀出有效數據。
i) 當所有的有效數據被讀出后,nRF905 將AM 和DR 置低。
3.1.3 跳頻的實現
nRF905 可以實現人工載波頻率控制,只需要修改nRF905 的RF 工作頻率寄存器的CH_NO 和HFREQ_PLL就可以選擇不同的載波頻率,實現跳頻。位變量HFREQ_PLL 為0,表示工作在430 MHz 頻段,頻道差為100 kHz;為1,則表示工作在868/915 MHz 頻段,頻道差為200 kHz。因此共有1 024 種通信頻率。通信頻率(H)為H=(422.4+(CH_NO)10/10)×(1+HFREQ_PLL)。
例如CH_NO=(001001100)2=(76)10,HFREQ_PLL=0,則H=(422.4+76/10)×(1+0)=430.0 MHZ。
本系統統一設置為工作頻段為430 MHz,頻道差為100 kHz,每一個頻點間隔為100 kHz,隨機數產生于0~128之間,跳頻帶寬為12.8 MHz,完成一次跳頻時間T≤800μs 。
3.2 基于跳頻通信遙控防盜器的可靠性設計及系統實現
3.2.1 生成隨機跳頻表增強安全性
為了增加安全性,每對密碼鎖除具有唯一對應的32 位加密地址外還增加了一一對應的隨機跳頻表,第一次使用時,將車機、人機對應的設置開關打開,人持終端可以產生一個隨機的跳頻表,并將該跳頻表通過握手頻率發送給車載終端,經返回校驗無誤時將該跳頻表存儲在掉電保護的非易失FLASH 存儲器中,關閉設置開關,在保證兩機有一一對應的跳頻頻率表的同時又很好地保護了頻率表的安全性,只要雙方按照事先約定的與跳頻表對應設置一致的CH_NO 和HEFREQ_PLL 的數值便可實現跳頻通信,增加了無線通信的可靠性、安全性。
3.2.2 設定握手及出錯、丟包回歸頻率,保證通信可靠
跳頻通信的一個突出問題就是盡管可靠性高,但一旦通信雙方通信錯誤,引發跳頻表讀取數據不一致, 系統將發生混亂,無法通信。為解決這一問題,提高防盜器安全性和可靠性,系統設定了一個固定頻率作為握手頻率,人機和車機之間的通信是先從一個雙方設定的握手頻率來進行握手連接,該頻率僅攜帶目標地址和握手請求或應答信號,即使被截獲也不影響系統的安全性。當系統出現問題雙方通信不成功時,馬上回到握手頻率,從跳頻表初始值重新開始通信。在一次指令信息傳輸進行過程中屏蔽中斷,保證信息的可靠傳輸。
3.2.3 系統工作過程
系統上電初始化跳頻表后,人機和車機都通過設定系統的工作模式(Set nRF905 Mode),配置nRF905 的寄存器(Configure Register),使其工作在握手頻率,接收模式(RX Mode)。當其中一端收到中斷請求時(車主指令/報警信息等),便發起握手請求,握手完成后,進行兩次跳頻通信過程,完成信息的發送及反饋,在發送過程中,發送方發出握手請求或指令后等待響應或反饋的時間不超過200 ms,否則便認為通信出錯,發起方重新發起請求。
以車主發出上鎖指令為例,系統整個工作過程如圖3,其他車主指令發送、車載報警信息的發送過程類似。
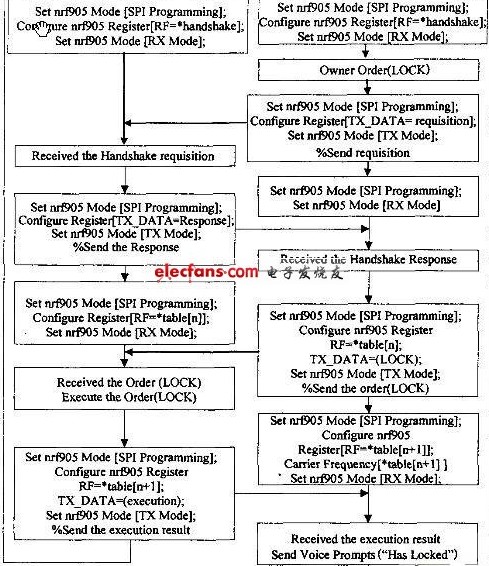
圖3 防盜器工作流程圖
4 結論
經測試該系統在小區內的可靠通信距離可達到150 m,滿足一般汽車防盜器的實際應用要求,采用跳頻通信保證了防盜器不易被截獲破解,通過通信方案的優化設計,保證了跳頻的通信可靠性,進一步提高了防盜器的安全性和可靠性。將該系統簡化外圍電路設計后也可用于摩托車防盜及其他防盜系統。
- 第 1 頁:跳頻通信在汽車智能防盜器中的應用
- 第 2 頁:跳頻的實現
本文導航
非常好我支持^.^
(1) 50%
不好我反對
(1) 50%
相關閱讀:
- [電子說] 基于TMS320C54X系列DSP實現跳頻通信網位同步方案 2021-06-14
- [電子說] 抗干擾慢跳頻通信系統的工作原理及實現應用設計 2021-05-19
- [物聯網] LoRa跳頻通信(FHSS)原理 使用擴頻技術的原因 2020-07-02
- [無線通信] 跳頻通信中的抗干擾同步算法研究 2011-08-23
( 發表人:彭菁 )