") 怎樣使用Android手機的藍牙控制機器人手臂
怎樣使用Android手機的藍牙控制機器人手臂
在這個項目中,我將向您展示如何構建Arduino& amp;使用Android手機的藍牙控制機器人手臂。該機器人手臂可以在手動模式下操作,也可以在全自動模式下進行編程。
您已經(jīng)看過一個來自Electronics Hub的機器人手臂項目,我們從廢料(除了電機和Arduino)做了一切。我們得到了你們對該項目的非常好的回應,基于此我們決定制作一個更好的版本2.0版,如果我必須說的話。
在進一步閱讀之前試試這個使用ARDUINO的簡單機器人武器。
這個DIY Arduino&藍牙機器人手臂項目使用Android手機通過藍牙通信進行操作。我們開發(fā)了Android手機應用程序,您可以使用它來控制機械臂進行手動操作或對其進行編程以實現(xiàn)全自動操作。我將在后面的章節(jié)中解釋它們。
想要購買 這個項目? MAIL US
Arduino電路圖&藍牙控制機械臂
讓我們從Arduino&的電路圖開始。藍牙控制機器人手臂項目。下圖顯示了具有所有必要連接的電路圖。
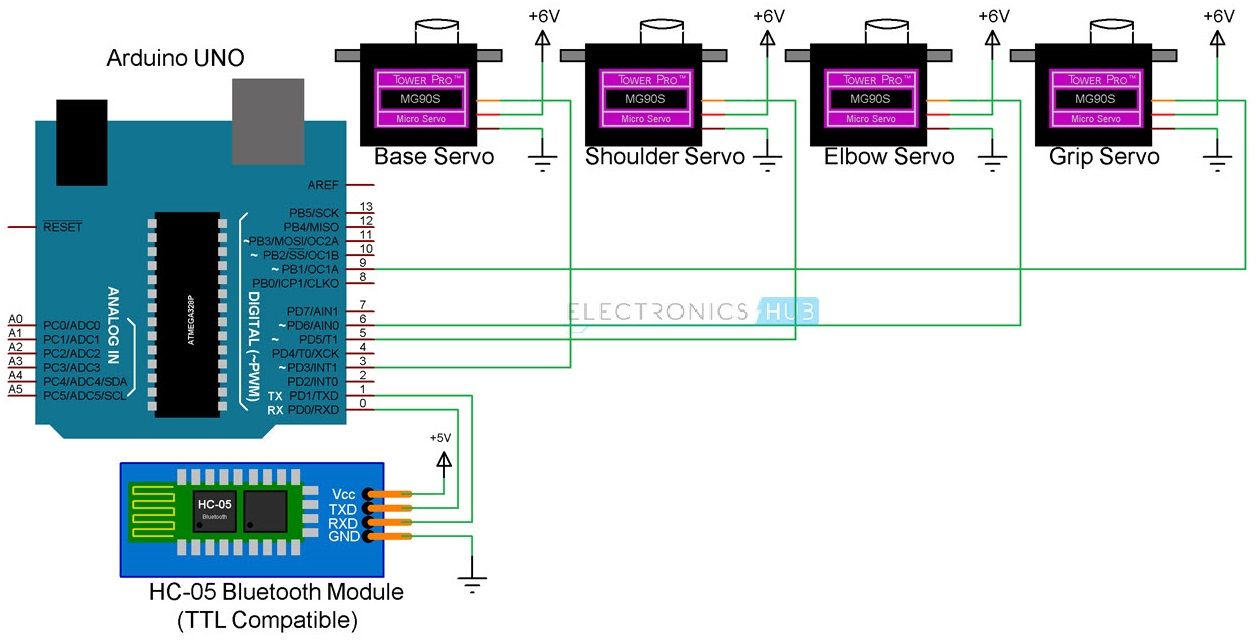
電路圖看起來非常簡單但構造部分機器人手臂有點復雜。
機械臂項目所需的組件
Arduino UNO [在此處購買]
4 x Tower Pro MG90S合金齒輪伺服電機[在此處購買]
HC-05藍牙模塊[此處購買]
3D打印機器人手臂部件及必要的螺釘,螺母和螺栓[購買]
Arduino和4伺服電機的正確電源[在此處購買]
連接線[在此處購買]
安裝了自定義應用程序的Android手機
組件說明
Arduino UNO和藍牙模塊在組件列表中非常簡單,但有趣的組件是Metal齒輪伺服系統(tǒng)和3D打印機器人手臂部件。
合金齒輪伺服MG90S
機械臂結構中使用的伺服系統(tǒng)是TowerPro MG90S合金齒輪微型伺服系統(tǒng)。我們選擇了這種特殊的伺服系統(tǒng),因為普通的塑料齒輪伺服系統(tǒng)不穩(wěn)定,失速扭矩也較小。
在6.6V電源下,這款金屬齒輪伺服系統(tǒng)提供2.2Kg/CM的失速扭矩(遠遠超過常規(guī)SG90伺服系統(tǒng))。
3D印刷機械臂
任何機器人手臂項目的重要特征之一就是美學。因此,我們決定選擇機器人手臂的3D打印部件。 daGHIZmo設計了一個名為EEZYbotARM的3D機器人手臂,并將文件上傳到Thingiverse網(wǎng)站。
對于機械臂的3D模型文件,請訪問鏈接。
基于在這些3D模型文件上,我們使用本地3D打印機插座制作了這些部件。質量非常好,尺寸也非常接近真實物體(不準確)。
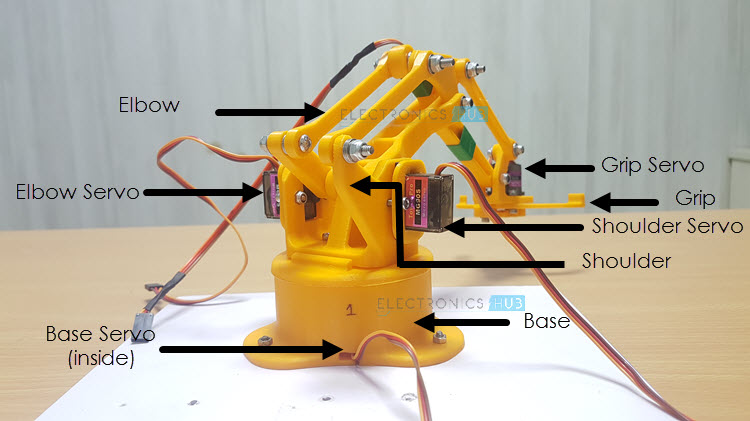
如果你觀察上面的圖像,我已經(jīng)將機器人手臂的部分指定為基部,肩部,肘部和握把。隨后,伺服電機也被稱為基本伺服,肩部伺服,彎頭伺服和手柄伺服。
如前所述,電路的設計非常簡單。 4個伺服電機的控制信號連接到Arduino UNO的4個PWM引腳,如下所示:基本伺服 - 引腳3,肩部伺服 - 引腳5,彎頭伺服 - 引腳6和手柄伺服 - 分別是Arduino引腳9。
所有伺服電機均為6V電源,而Arduino UNO則為9V電源。 HC-05藍牙模塊的TX和RX連接到Arduino的RX0和TX0引腳,即引腳0和1。
注意:編程Arduino時請勿連接藍牙模塊。
組裝3D打印機械臂部件
如果我解釋機器人手臂3D部件的逐步裝配程序,那將是一個非常冗長乏味的閱讀。因此,我將發(fā)布已完成機器人的一些照片,并將制作關于如何組裝機器人手臂的單獨視頻。在此期間,請看一下這些圖像。
Arduino的Android應用程序&藍牙控制機械臂
我們決定更進一步,設計一個簡單的Android手機應用程序,而不是通過計算機使用電位計或串行通信控制機器人手臂。
下圖顯示了運行Android 6.0版的智能手機中的應用程序布局。但該應用程序已針對Android版本8.0進行了測試,并且運行正常。
每對箭頭控制鍵有四對分別用于肩部,肘部,基部和握把舵。有一個程序按鈕,使用它可以啟用程序模式。有關項目工作的更多信息。
注意:
此應用程序使用Android手機的藍牙功能。此應用目前無法在Google Play商店中使用,因為它仍在測試中。
截至目前,我們尚未開發(fā)適用于iOS的應用。
想要購買 這個項目? MAIL US
Arduino&的工作藍牙控制機器人手臂
簡單的3D打印,基于Android手機,Arduino&藍牙控制機器人手臂是在這個項目中設計和開發(fā)的。我們現(xiàn)在將看到此機械臂的操作和工作。
在Android手機中安裝應用程序并提供訪問設備藍牙所需的權限。如果藍牙模塊(HC-05)未與手機配對,請使用手機的藍牙設置進行配對。
設備配對后,打開應用程序,它將自動列出配對的藍牙設備。選擇正確的藍牙模塊,如果一切順利,您將進入主控制面板。
在這里,您可以看到機器人手臂的四個伺服電機的控制,即基地,肩膀,肘部和握把。使用相應伺服電機的箭頭鍵并控制機械臂。這部分工作是機器人手臂的手動操作,每個動作必須手動調(diào)整。

下一步有趣的部分來了。您可以在中心看到一個名為“程序”的按鈕。在操作的任何時候,如果按此按鈕,機械臂將重置(移動到默認位置)并激活編程模式。
在此模式下,您可以對機械臂進行編程,以自動方式執(zhí)行一系列任務。例如,如果您想從一個地方選擇小物件并將其放在另一個地方,則無需一直手動調(diào)整值。
所有您需要的要做的是進入編程模式并教導機器人手臂按照一系列步驟來完成任務。編程機械臂后,您可以運行程序,它將循環(huán)這些已編程的步驟直到停止。
您也可以隨時暫停自動操作并從同一點繼續(xù)。此外,如果您希望退出編程模式并手動操作機械臂,您可以簡單地“關閉”編程模式。
將很難清楚地解釋機械臂的操作(手動和自動模式)在這里。所以,我會制作同樣的視頻。
Arduino& amp;藍牙控制機械臂項目
此機器人手臂可以使用任何基于Android的藍牙智能手機進行控制。
用于Android手機的專用應用程序,用于控制機械臂。
有兩種操作模式:手動模式和自動模式。
對于常規(guī)或手動操作,您可以通過操縱機械臂的各個伺服電機的值來控制機械臂。
當編程模式為啟用后,您可以對機械臂進行編程以實現(xiàn)全自動操作。
機械臂包含四個金屬齒輪伺服系統(tǒng)和3D打印零件。
-
機器人
+關注
關注
213文章
29530瀏覽量
211701 -
藍牙
+關注
關注
116文章
6041瀏覽量
173271 -
Arduino
+關注
關注
189文章
6493瀏覽量
190188
發(fā)布評論請先 登錄
STM32+Android實現(xiàn)的智能家政機器人電路代碼論文及項目源碼
機器人手臂"聽不懂"指令?EtherCAT轉PROFINET網(wǎng)關妙解產(chǎn)線通信僵局
詳細介紹機場智能指路機器人的工作原理
有人這CAN機器手臂控制板的原理圖嗎?CAN舵機ID無法被識別
開源項目!教你如何制作一個開源教育機械臂
未來已來,2025人形機器人量產(chǎn)啟航!泰科機器人成功斬獲近千萬訂單

伺服電動缸在人形機器人中的應用
ABB機械手臂(機器人)數(shù)據(jù)采集物聯(lián)網(wǎng)解決方案

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
變速齒輪在機器人中的使用
藍牙5.2低功耗模塊在光伏清掃機器人中的應用優(yōu)勢

【開源項目】你準備好DIY一款功能強大的機器人了嗎?
助力風電行業(yè)!深視智能SR7400線激光以機器人手眼標定實現(xiàn)風力葉片切割引導

AMD Kria? KR 260套件+ROS 2快速開發(fā)機器人解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論