 如何正確車距檢測預警HMW與前車碰撞預警FCW
如何正確車距檢測預警HMW與前車碰撞預警FCW

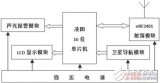
車距檢測預警技術同樣是檢測本車與前車的車距(HEADWAY),在車距過近的情況下向駕駛員發出警報。因為車距Headway一般會換算成時間顯示出來,所以容易與FCW的碰撞時間混淆,但是HMW的車距時間和FCW的碰撞時間(TTC)計算方式是不同的:
Headway車距時間 = 兩車車距 / 本車的車速
FCW的碰撞時間(TTC)= 兩車車距 / 兩車的相對車速
比如,當前后兩車的距離為20米,前車的車速為60Km/h,后車的車速為80Km/h, 那么HMW顯示的時間就是1.2秒,而FCW顯示的TTC碰撞時間就是3.6秒。如果前后車的車速都為60Km/h,那么HMW顯示的時間同樣是1.2秒,而FCW不會報警,因為兩車雖然距離很近,但是速度相同,并不會追尾。所以,在前后車都處于運動狀態時,FCW的TTC碰撞時間一般要長于Headway車距時間。
在實際場景中,HMW主要在車距近的情況下報警,可以幫助駕駛員養成開車保持車距的規范駕駛習慣,我們將其定義為“危險不緊急”型功能;而FCW主要針對前后兩車距離較近且存在較大速度差的緊急情況,比如前車急剎,屬于“危險且緊急”型功能。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
預警
+關注
關注
1文章
47瀏覽量
14622 -
智能汽車
+關注
關注
30文章
3068瀏覽量
108276 -
車距監測
+關注
關注
1文章
2瀏覽量
6998
發布評論請先 登錄
相關推薦
熱點推薦
利用RFID和衛星導航技術實現車距監測的預警
汽車為人類社會的發展做出了突出的貢獻,但也帶來了觸目驚心的傷害。近年來,隨著高速公路的發展,汽車行駛速度提高,惡性交通事故頻發。在車禍造成的死亡事故中,追尾占25%。因此,研究能夠隨時獲取道路和車輛信息,并及時提醒汽車駕駛員采取措施避免危險的車距監測
發表于 09-27 15:01
?1697次閱讀
激光雷達在無人駕駛技術中的應用解析
做出任何回應,那么車輛就會自動剎車。5. 前方碰撞預警系統 Forward Collision Warning (FCW)FCW 能夠通過雷達系統和攝像頭來時刻監測前方車輛,判斷本
發表于 10-18 17:18
想買個ADAS的開發板。完成功能有LDW, FCW 行人檢測 車距監控等,芯片是BF609,請問應該買什么型號?
你好!想買個ADAS的開發板,完成功能有LDW, FCW 行人檢測 車距監控 等,芯片是BF609,那么開發板的型號是啥?
發表于 07-31 07:09
流媒體后視鏡 柔光夜視清盲區實用性強
,擁有五倍后視視野之外,能真正做到后視鏡的功能精華,多功能集于一身。擁有非常強大的自然語言控制能力,還集成ADAS高級駕駛輔助,支持前方碰撞預警FCW、前車啟動提醒PVS、車道偏移
發表于 12-13 16:33
怎么設計基于FPGA的車道偏離預警系統?
公路交通安全管理局(NHTSA)2009年乘用車在交通事故中碰撞位置的統計數據,在各種交通事故中,車輛前部碰撞占到總事故的62%,而這其中多數是由于車道偏離車道所引起的交通事故,因此通過設計汽車車道偏離預警系統有效地減少前向
發表于 09-18 08:28
基于FPGA的目標碰撞預警系統
為了解決空間目標與航天器發生碰撞的問題,設計了一種基于FPGA,以在軌目標三維坐標為待處理數據進行快速并行處理的目標碰撞預警系統。該系統基于Xilinx 公司FPGA芯片中的內容可尋址存儲器(Content Addressabl
發表于 03-07 15:29
?43次下載

關于AWS碰撞預警系統技術簡介
AWS能在與前方車輛碰撞之前 秒(平均) 能在與前方車輛碰撞之前2.7秒 平均) 能在與前方車輛碰撞之前 發出碰撞預警。平常的駕駛員花費0.
關于車道偏離預警系統和前碰撞預警系統分析介紹和應用
這意味著,車道偏離預警系統(LDW)和前碰撞預警系統(FCW)將正式成為營運客車的標配,而這兩項預警功能恰恰又是ADAS汽車防撞
部分商用車企業批量采購ADAS預警設備
功能。因為疫情原因,這一法規推遲至2020年9月開始執行。 根據中國交通部及相關媒體數據,2020年7月份開始,部分商用車企業開始批量采購ADAS預警設備,從2020年9月1日到12月底重型牽引車(營運類) 搭載ADAS (FCW
發表于 10-15 14:49
?499次閱讀

為你的智能座駕選擇適宜的存儲器
縱觀整個市場,現在的汽車究竟搭載了多少復雜的功能?自動泊車、碰撞警告、主動剎車、ACC自適應巡航、VSA車聯網檢查、ISA電子警察系統、TMC實時交通系統、360環視、并線輔助、LDWS車道偏移警告系統、HMW





 工商網監
工商網監
評論