 如何將FSR與NodeMCU連接
如何將FSR與NodeMCU連接

步驟1:需要的組件
所需的一切。
需要硬件
NodeMCU
FSR(力敏電阻)
10K歐姆電阻器
面包板
Micro USB線
連接線
需要軟件
第2步:描述
伺服電機是可以轉到指定位置的絕佳設備。
通常,它們有一個可以從0到180度轉動的伺服臂。
通常 FSR 是電阻器,它會改變其電阻值(歐姆)取決于多少它的力/壓力施加在它上面。
因此,使用NodeMCU,我們通過在FSR上施加力將伺服臂控制到指定位置。就這么簡單!
將伺服電機與NodeMCU接口
接口強制電阻到NodeMCU
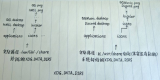
第3步:電路接線
無焊接技巧是必需的,因為我們將使用面包板。
FSR 連接 非常簡單,請參閱電路圖。
伺服連接 :
橙色導線連接到數字引腳 D2。
布朗導線連接到 GND 引腳。
紅色導線連接到 3v3 pin。
第4步:編碼時間
CODE
#include Servo servo;
const int sensorOut = A0; // Pin A0 to read analog input
//Variables:
int pressure; //To store analog value void setup(){
Serial.begin(9600); // Begin serial communication
servo.attach(4); //D2
servo.write(0);
delay(1000);
} void loop(){
pressure = analogRead(sensorOut); //Read and store analog value from Force Sensitive Resistance
Serial.println(pressure); //Print value
pressure = map(pressure, 0, 1023, 0, 180);//Map value 0-1023 to 0-255 (PWM)
servo.write(pressure);
delay(100);
}
下載“ Control servo arm_FSR.ino ”文件并在Arduino IDE中打開它。
然后創建一個新草圖并將下面的代碼粘貼到Arduino IDE中并點擊Upload。你可以根據應用程序修改它,或者只是按原樣使用它。
步驟5:輸出
使用串行監視器,您可以檢查連接到FSR的模擬引腳的輸出。
根據施加的壓力,伺服臂轉動。
-
NODEMCU
+關注
關注
13文章
289瀏覽量
22346 -
FSR
+關注
關注
0文章
33瀏覽量
6890
發布評論請先 登錄
如何將項目從IAR遷移到Embedded Studio
請問如何將DLP lightcrafter連接成為普通的投影儀使用?
如何將RT-Thread移植到NXP MCUXPressoIDE上

如何將python文件導入到ROS系統中







 工商網監
工商網監
評論