") Arduino固定雷達(dá)LIDAR陣列的制作
Arduino固定雷達(dá)LIDAR陣列的制作
步驟1:工具和零件


工具
此項(xiàng)目需要以下工具:《
烙鐵
助焊雙手
杜邦壓接工具
1.5mm六角扳手
電線涂層清除工具
剪線鉗
熱膠槍
鑷子
放大鏡(手機(jī)中的物理或應(yīng)用)
扁嘴鉗
零件
本項(xiàng)目使用以下部件:
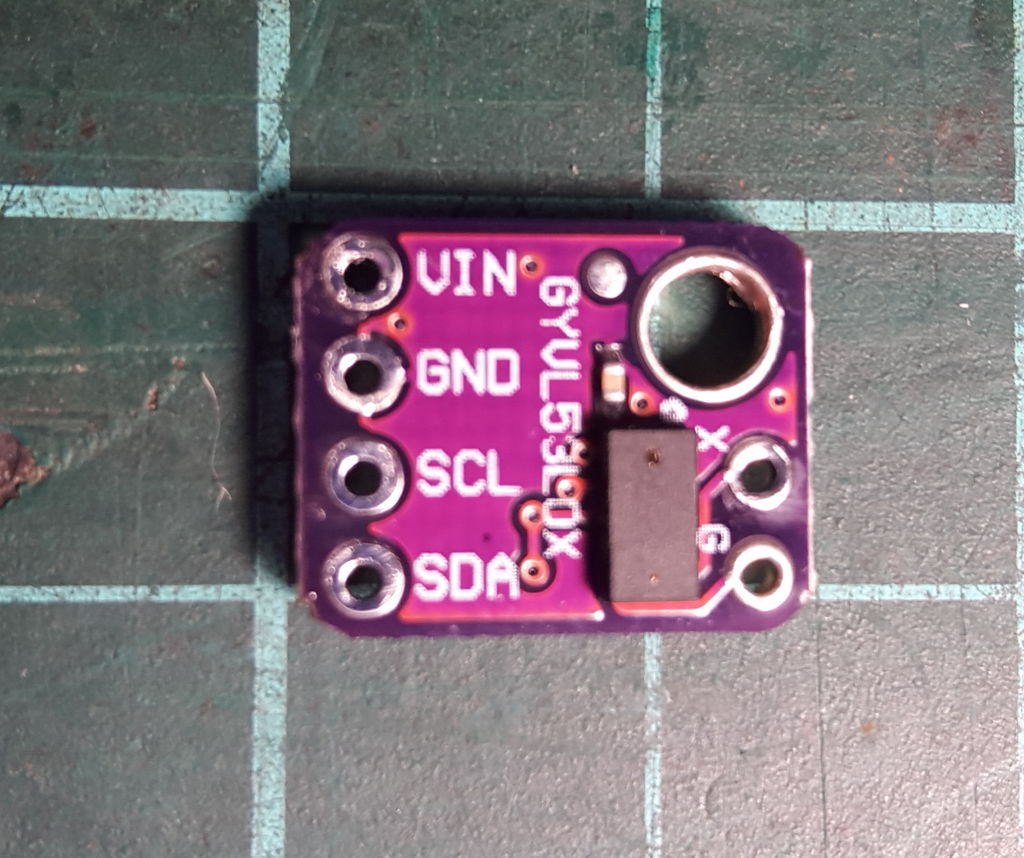
10x VL53L0X GY-530分線板
Arduino(Uno,Nano,Mega,Zero,Mini等)
面包板和一些面包板電線
AWG#26不同顏色的電線
AWG#30單芯電線
5x Dupont公連接器
5x單針Dupont外殼
10x 3D打印分線板支架
1x 3D打印圓形框架
10x M2x10平頭螺釘
10x 0804 LED(藍(lán)色推薦)
10x SOT-23 AO3400 N通道MOSFET
小電容(10~100uF)
分線板
我使用的VL53L0X分線板是GY-530。還有Adafruit版和Pololu版。如果可行,我建議使用Adafruit或Pololu的產(chǎn)品,因?yàn)樗鼈兛梢灾谱鞒錾漠a(chǎn)品,出色的教程和出色的軟件庫(kù)。我在Adafruit的VL53L0X庫(kù)上進(jìn)行了測(cè)試,并使用了Pololu的VL53L0X庫(kù)的修改版本。
杜邦連接器
杜邦連接器用于面包板。您可以使用手頭的任何其他類型的連接。
螺絲和3D打印件
M2螺絲,支架和圓形框架用于將傳感器放置成圓形排列。您可以使用任何其他方法,例如使用卡板,模型木材,粘土,甚至將熱膠粘在罐上。
第2步:黑客攻擊板

檢測(cè)錐
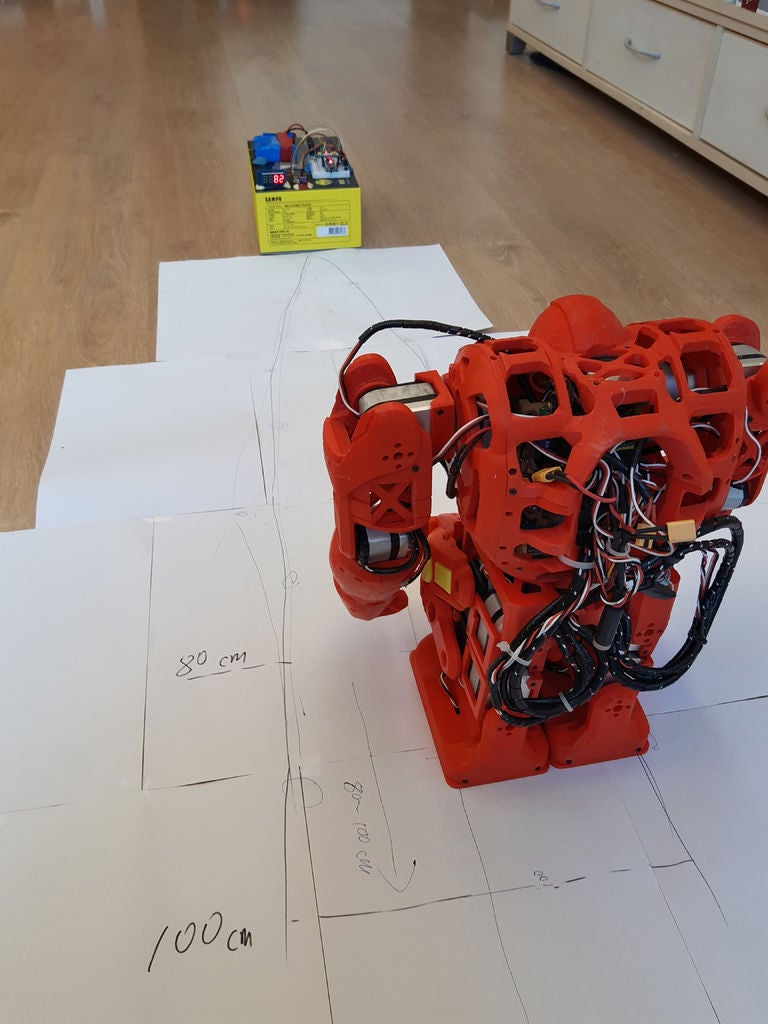
我用一個(gè)模塊繪制檢測(cè)錐。使用大多數(shù)3D打印機(jī)器人作為目標(biāo)。距離顯示在LED顯示屏上,并粗略測(cè)量。測(cè)量數(shù)據(jù)記錄到Microsoft Excel文件中,并使用曲線擬合功能。最佳擬合是自然對(duì)數(shù)曲線,有效距離為3厘米至約100厘米。
在60 cm處,單個(gè)傳感器的檢測(cè)曲線約為22 cm。對(duì)于20厘米寬的目標(biāo),雷達(dá)陣列的10~15度的圓形間隔應(yīng)產(chǎn)生可接受的掃描分辨率。
I2C地址
雖然VL53L0X I2C器件地址是可編程的,但需要通過微控制器完全控制XSHUT引腳。執(zhí)行此操作的順序?yàn)椋?/p>
電源應(yīng)用于AVDD。
通過將 ALL 的XSHUT引腳驅(qū)動(dòng)為低電平,所有VL53L0X芯片都進(jìn)入Hw待機(jī)(復(fù)位)狀態(tài)。
每個(gè)芯片一次退出復(fù)位狀態(tài)。引導(dǎo)后的默認(rèn)I2C地址為0x52。
通過I2C命令將芯片地址更改為新地址。例如,0x52更改為0x53。
對(duì)所有芯片重復(fù)步驟3和4.
理論上,對(duì)于7位地址范圍,最多可以在同一總線上驅(qū)動(dòng)126個(gè)單元。然而,實(shí)際上,微控制器的總線電容和吸收電流限制可能/應(yīng)該限制最大器件數(shù)量。
新的I2C地址未存儲(chǔ)在VL53L0X芯片中,以防止掉電或復(fù)位。因此,每次加電都必須進(jìn)行一次該過程。這意味著雷達(dá)陣列中的每個(gè)單元都需要一個(gè)寶貴的引腳。對(duì)于具有10+或20+單元的雷達(dá)帶,這對(duì)于布線和引腳消耗來說太不友好了。
如STEP1所述,幸運(yùn)的是VL53L0X芯片上有一個(gè)GPIO1引腳,最初用于中斷,可以完成這項(xiàng)工作。
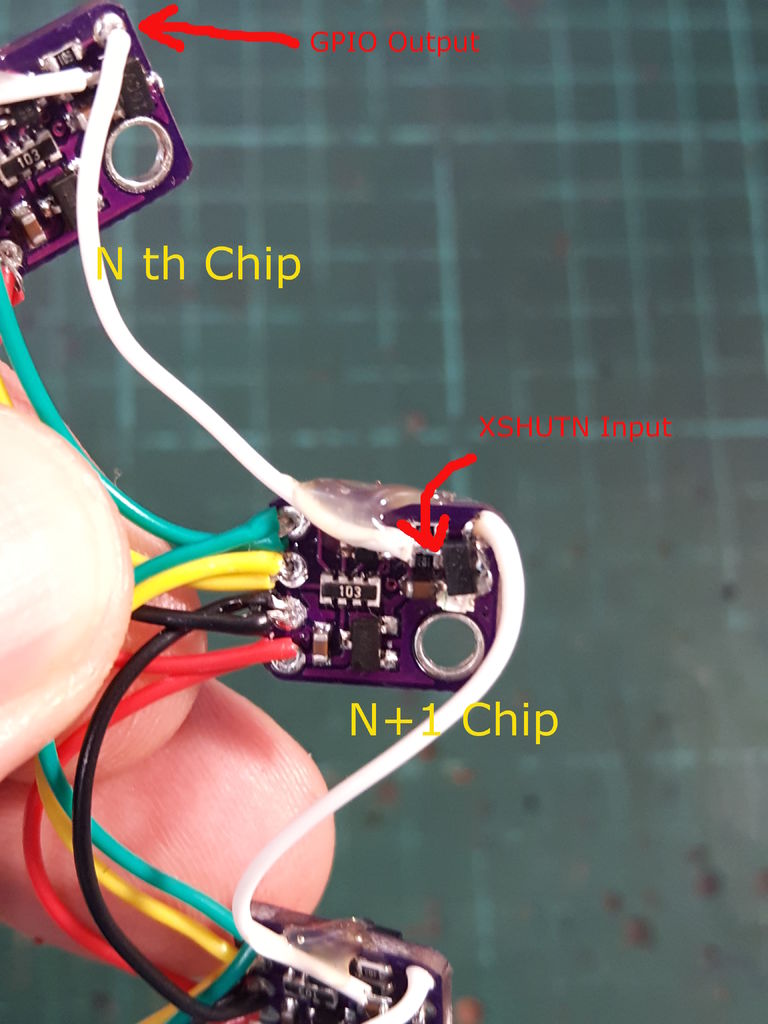
GPIO-XSHUTN菊花鏈
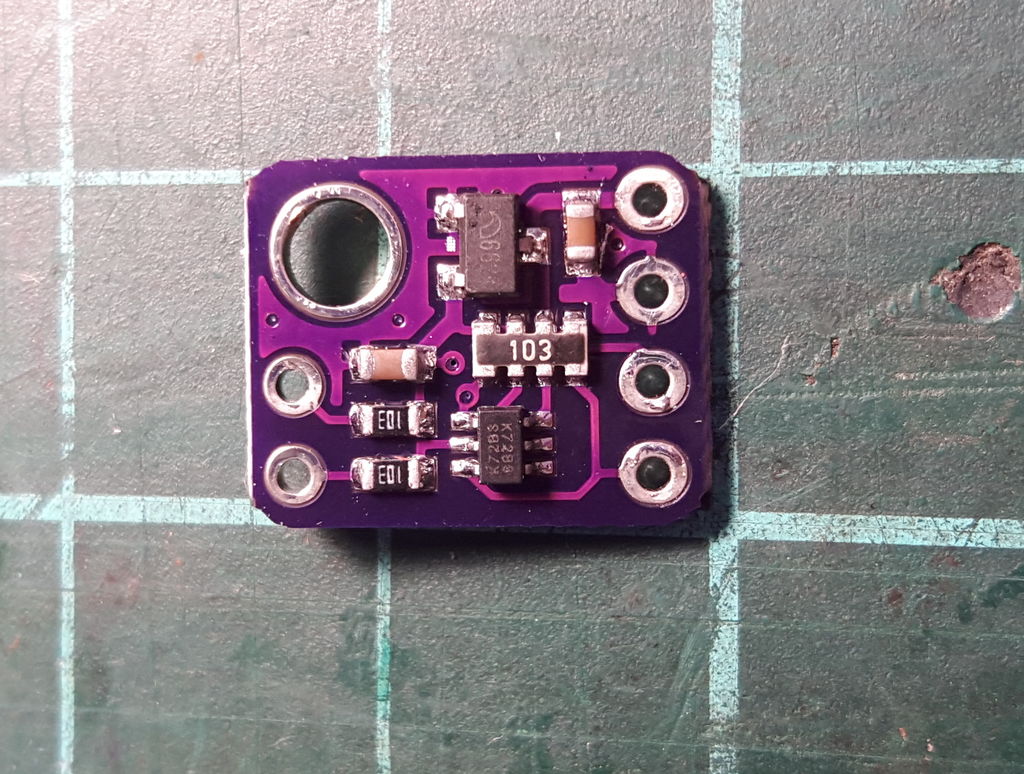
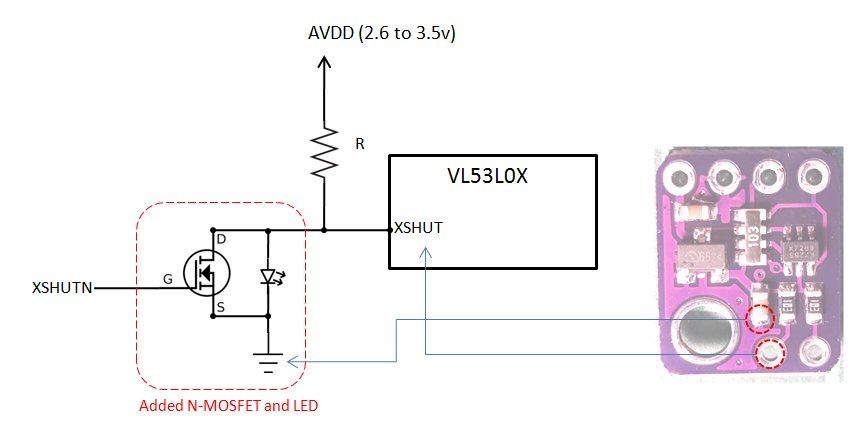
GPIO輸出在啟動(dòng)時(shí)處于高阻態(tài),在有效時(shí)開漏至低電平。根據(jù)數(shù)據(jù)表中的建議,GPIO和XSHUT引腳被拉高至GY-530分線板上的AVDD。為了可靠地將所有VL53L0X芯片置于Hw待機(jī)狀態(tài)(驅(qū)動(dòng)XSHUT為低電平),我們需要為每個(gè)XSHUT引腳提供邏輯非門(反相器)。然后我們將一個(gè)芯片(第N個(gè)芯片)的GPIO輸出連接到下游芯片(N + 1芯片)的XSHUTN(XSHUT-NOT)。
上電后,所有GPIO引腳(無效)被上拉,所有后續(xù)XSHUT引腳被NOT門驅(qū)動(dòng)為低電平(XSHUTN引腳連接到微控制器的第一個(gè)芯片除外) 。下游芯片的I2C地址更改和XSHUT釋放是逐個(gè)軟件完成的。
如果您使用不同的分線板,則需要確保上拉電阻是否到位,并進(jìn)行適當(dāng)?shù)恼{(diào)整。
添加LED
在下一步中,將一個(gè)小的0805 SMD LED添加到分線板,從XSHUT焊盤連接到相鄰電容的GND端子。雖然LED本身不會(huì)影響模塊的運(yùn)行,但它確實(shí)為我們提供了XSHUT邏輯電平的良好視覺指示。
將LED與XSHUT引腳上的上拉電阻(我的情況下為10k)串聯(lián),會(huì)引入電壓降。而不是3.3v的高邏輯電平,紅色0805 LED的正向壓降測(cè)量為1.6v。雖然這個(gè)電壓高于數(shù)據(jù)表中的高邏輯電平(1.12v),但藍(lán)色LED更適合這種黑客攻擊。藍(lán)色LED的正向壓降約為2.4V,安全地高于芯片的邏輯電平。
添加N-MOS逆變器(邏輯非門)
小型SOT -23 N溝道MOSFET堆疊在我們添加的LED上。需要在分線板上焊接兩個(gè)端子(D,S),并使用#26線將剩余端子(G)連接到上游板GPIO引腳。
添加SMD元件的注意事項(xiàng)
在不適合的分線板上焊接SMD元件并非易事。如果你還沒有聽說過0805,SMD,SOT-23,你可能以前沒有焊接那些微小的元件。在手工處理這些微小元件時(shí),很常見的是:
小東西剛剛掉下來,永遠(yuǎn)消失了,
小東西上的小墊子只是剝?nèi)ァ?/p>
小東西上的小腿剛破了。
焊錫剛聚集成一團(tuán),無法分開。
還有更多。..
如果你還想制作這種雷達(dá),你可以:
將組件更改為更大的包,例如DIP樣式。
獲得比實(shí)踐和消費(fèi)所需的更多組件。
步驟3:焊接0805 LED
焊接0805 SMD LED
在非SMD設(shè)計(jì)的分線板上手工焊接0805 LED并非易事。以下步驟是我建議焊接LED。
使用輔助手握住分線板。
在SMD電容器邊緣和“XSHUT”焊盤上放置一些焊膏。
使用烙鐵在電容器邊緣添加一些額外的焊料。
在0805 LED的兩端涂上一些焊膏。
使用烙鐵在0805 LED的兩端加一些錫。
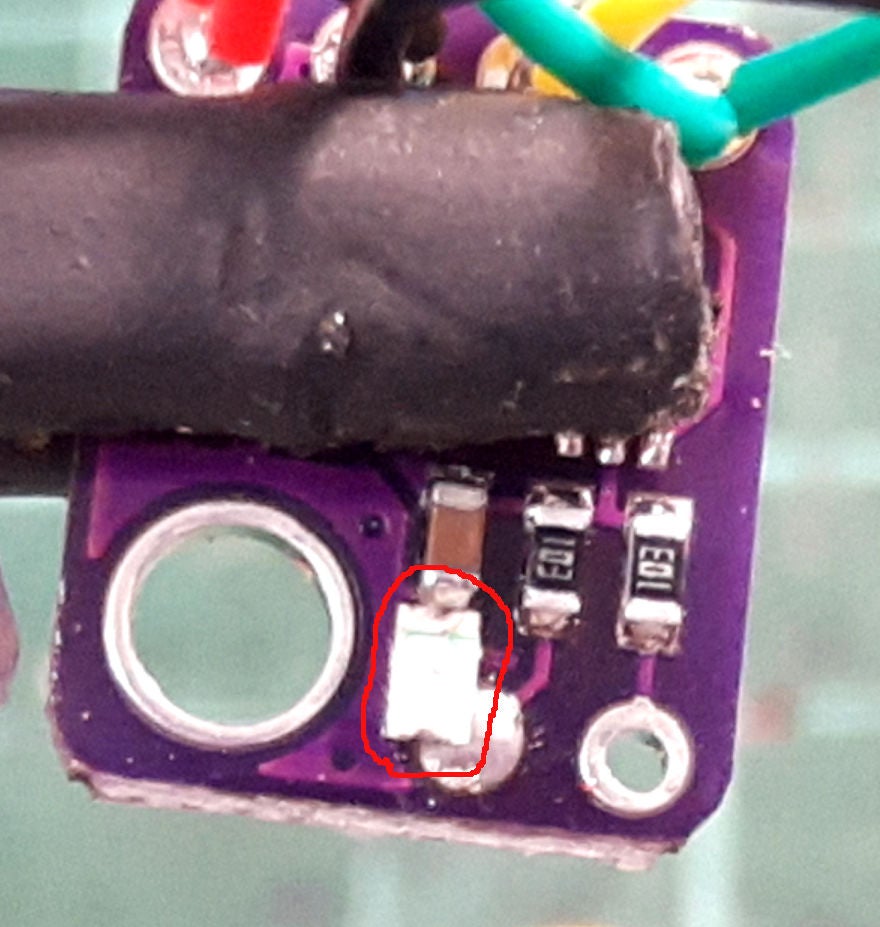
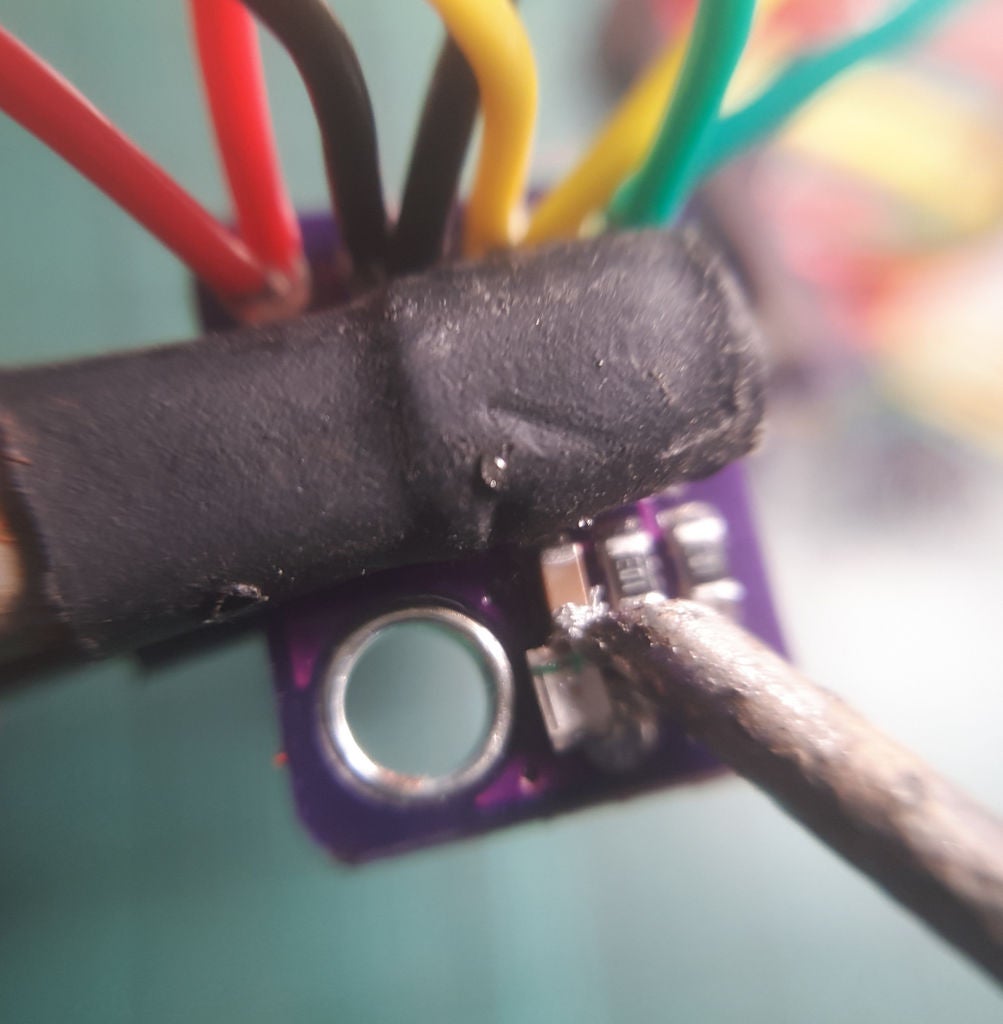
使用鑷子將LED放置在照片中。陰極端通常有一條標(biāo)記線。在我的例子中,陰極端有一條綠線。將陰極端放在電容器端。
使用鑷子在LED上向電容器添加輕微壓力,并通過同時(shí)向電容器端加熱來將LED焊接到電容器端。不要用力按壓LED。它的蓋子可能會(huì)在高溫和過大壓力下破裂。焊接后,在側(cè)面添加溫和的壓力,測(cè)試LED是否焊接到位。
現(xiàn)在將LED焊接在XSHUT浸漬墊上。此步驟應(yīng)該更容易。
注意:圖中所示的電容器端是該分線板上的接地端子。并且通過電阻器將上拉焊盤XSHUT上拉。
測(cè)試LED
當(dāng)您接通電源(ex 5V)并接地到分線板時(shí),LED應(yīng)該亮起。
步驟4:焊接N溝道MOSFET
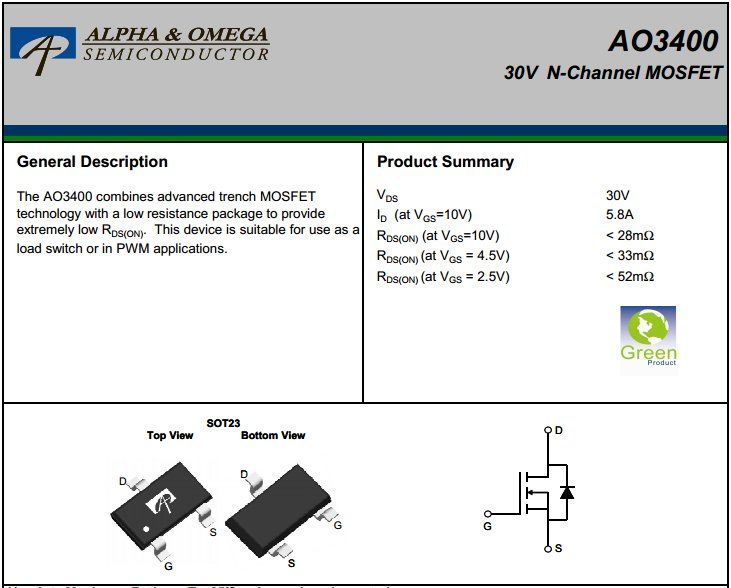
焊接AO3400 N溝道MOSFET
該MOSFET采用SOT-23封裝。我們需要將它“堆疊”在LED上,并添加一根電線:
在所有三個(gè)端子上放一些焊膏和錫。
使用鑷子將MOSFET放置在0805 LED的頂部。 S端子應(yīng)接觸電容器頂部
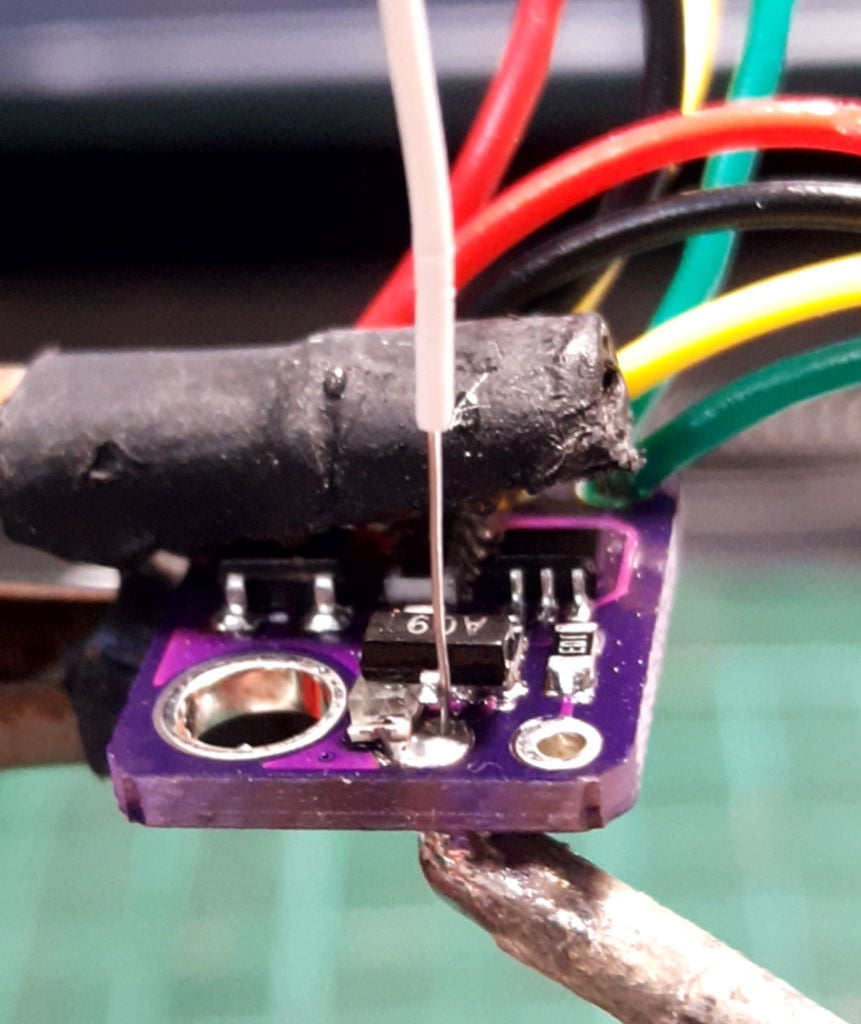
用電容器端焊接S端子,如圖所示。
切割一小段AWG#30單芯線,并去除約1cm的涂層。
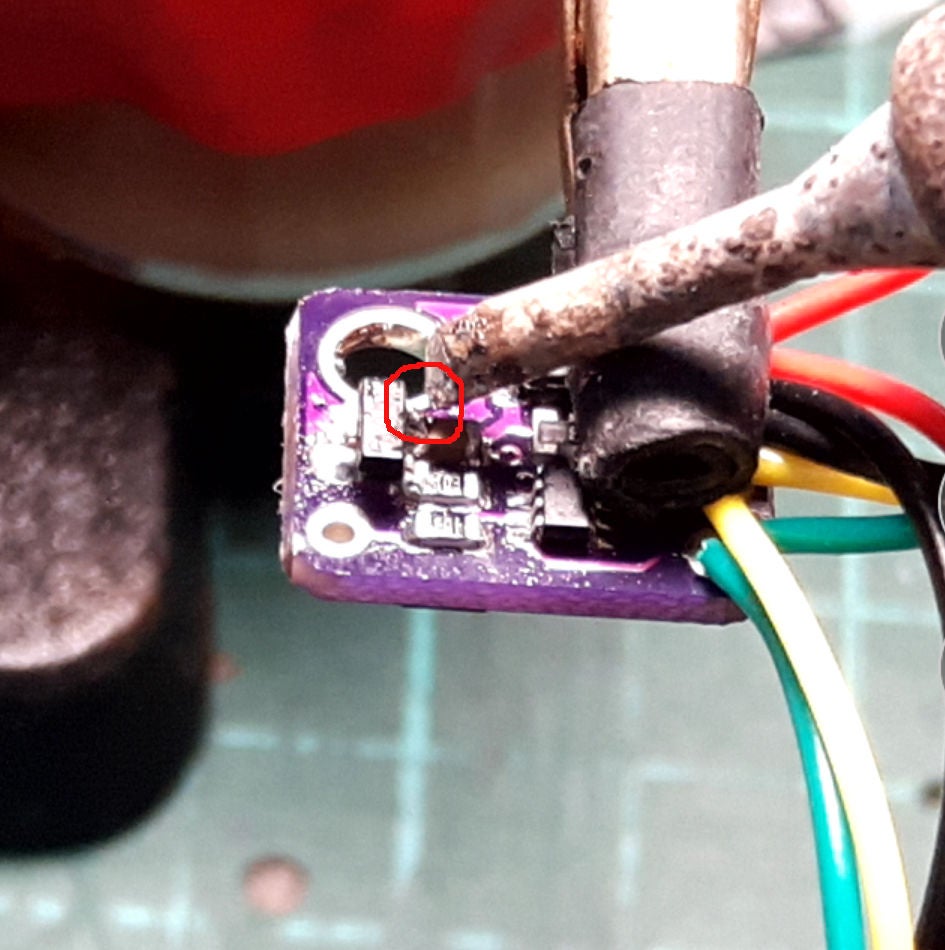
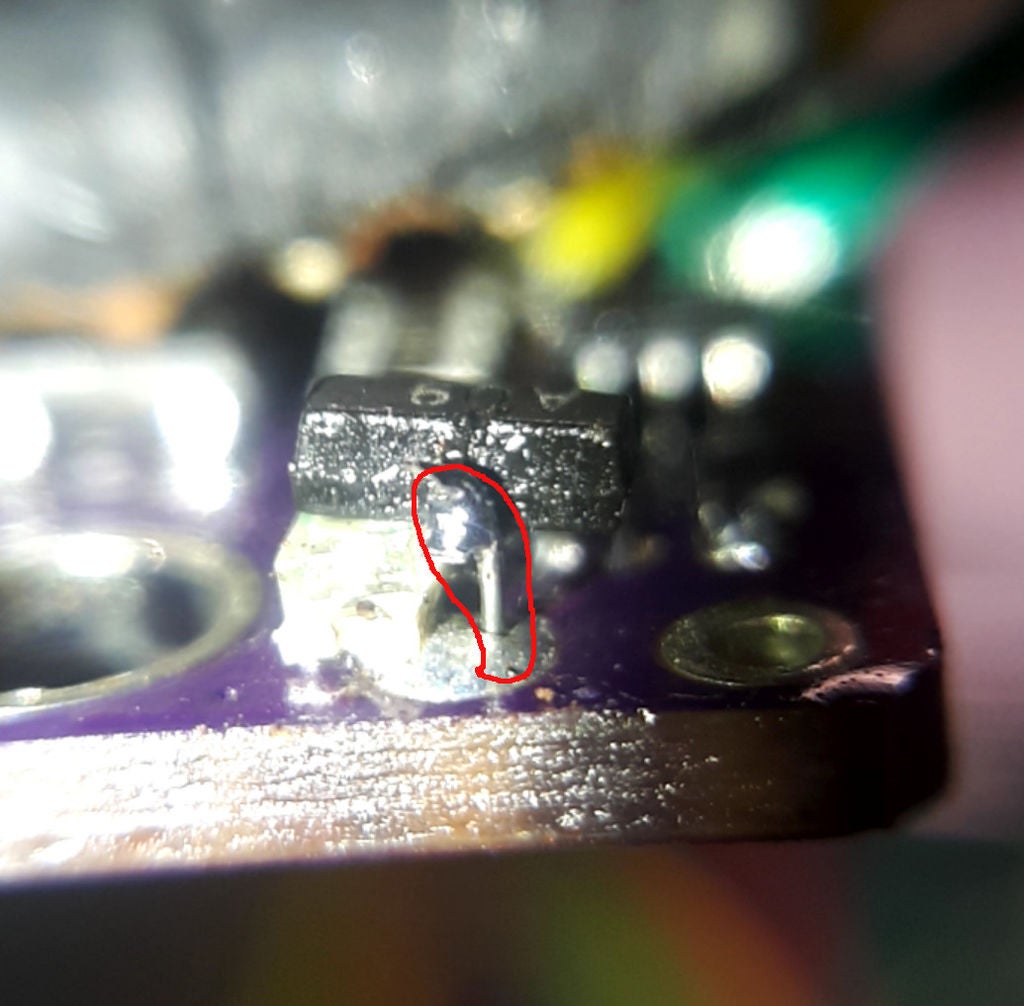
使用烙鐵從下方熔化XSHUT孔中的焊料,并從上方插入#30線,如圖所示。
將導(dǎo)線的上端焊接到MOSFET D端子。
切斷多余的電線。
注意:MOSFET S端子連接到電容器端,如圖所示。這一端是地面終端。 MOSFET D端子連接到原始XSHUT引腳。
此時(shí)端子G未連接。它的位置恰好高于一些上拉電阻。確保它們之間有間隙(N-MOS和電阻)并且彼此不接觸。
步驟5:連接傳感器陣列
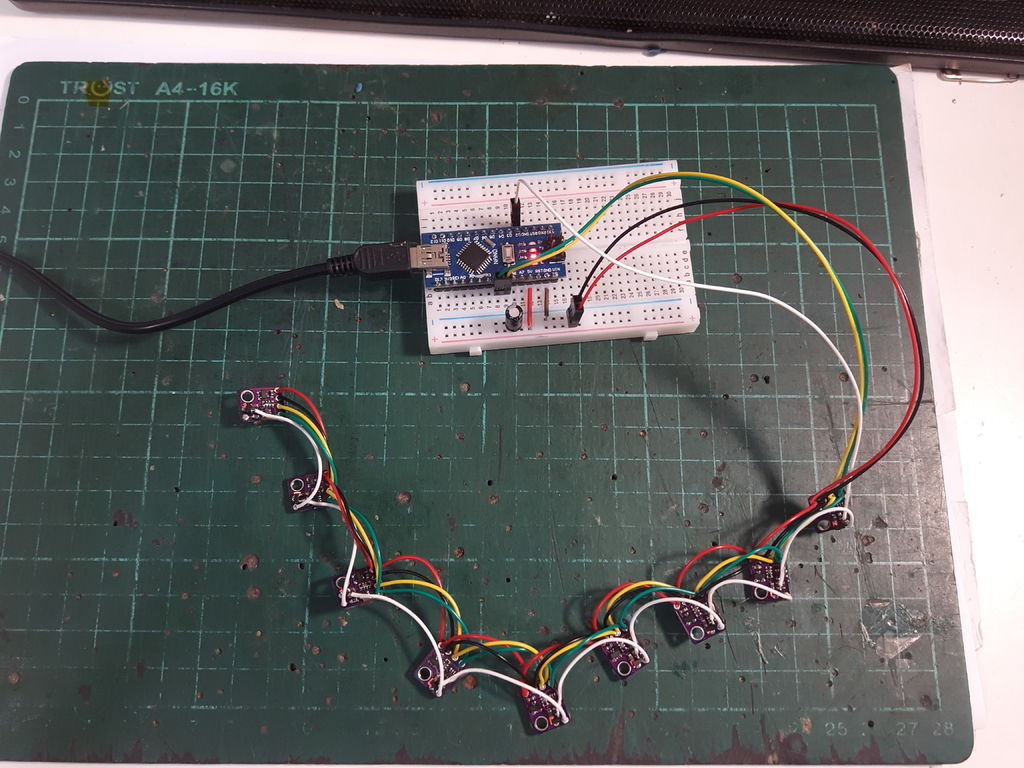
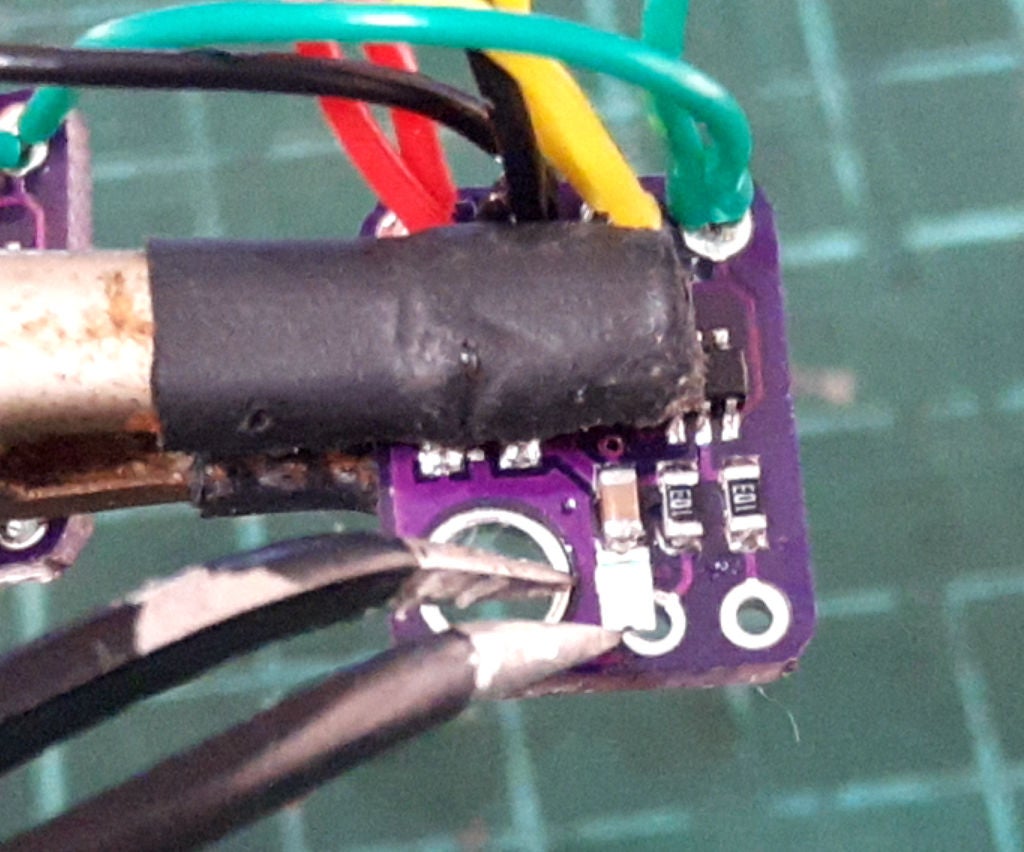
公共總線接線
公共巴士包括:
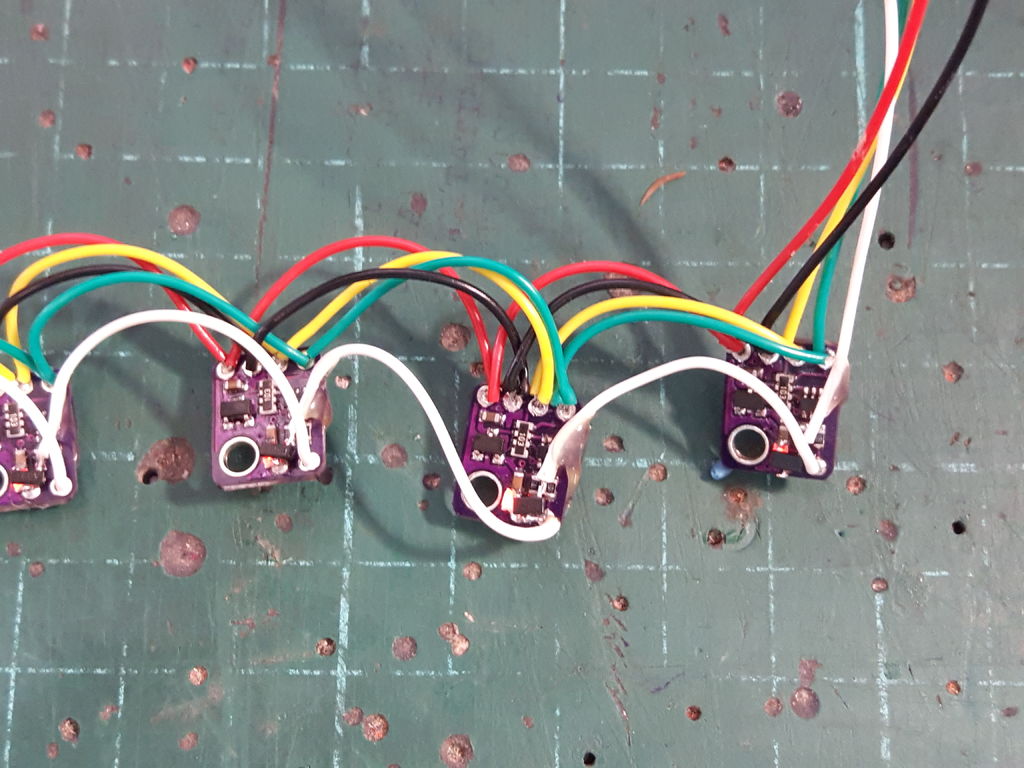
Vcc電源。照片中的紅色。我正在使用具有5v邏輯的arduino nano。分線板具有LDO和電平轉(zhuǎn)換器。因此使用5v作為Vin是安全的。
接地。照片中的黑色。
SDA。照片中的綠色。
SCL。照片中的黃色。
這四行是常見的行。切割適當(dāng)長(zhǎng)度的電線并將它們并聯(lián)焊接到所有傳感器模塊。我從arduino到第一個(gè)傳感器使用了20厘米,之后每個(gè)5厘米。
XSHUTN和GPIO接線
20厘米白色線從arduino控制引腳到第一個(gè)傳感器的XSHUTN引腳。這是使第一個(gè)VL53L0X芯片退出復(fù)位并更改I2C地址所需的控制線。
每個(gè)模塊之間的5厘米白線是菊花鏈控制線。上游芯片(例如芯片#3)GPIO焊盤連接到下游(例如,芯片#4)XSHUTN腳(N溝道MOSFET G端子)。
小心不要制作G端子與下面的電阻器接觸。您可以在間隙中添加絕緣膠帶。這里可以使用通常隨VL53L0X芯片提供的保護(hù)襯墊。
使用熱風(fēng)槍粘住控制線。
熱膠
正如您在照片中看到的那樣,在N-MOS G端子附近的白色控制線上有一團(tuán)熱膠。這一步非常重要,絕對(duì)必要。直接焊接到SMD元件腿部的浮動(dòng)焊接非常薄弱。即使電線上的小壓力也可能會(huì)使腿部斷裂。輕輕地執(zhí)行此步驟。
測(cè)試LED
當(dāng)您向傳感器陣列供電(例如3.3v-5v)和接地時(shí),第一個(gè)模塊上的LED應(yīng)響應(yīng)XSHUTN線邏輯電平。如果將XSHUTN連接到邏輯高電平(例如3.3v-5v),LED應(yīng)該關(guān)閉。如果將XSHUTN線連接到低(接地),則第一個(gè)模塊上的LED應(yīng)該亮起。
對(duì)于所有后續(xù)模塊,LED應(yīng)該關(guān)閉。
此測(cè)試是在連接到arduino之前進(jìn)行。
-
雷達(dá)
+關(guān)注
關(guān)注
50文章
3089瀏覽量
119523 -
Arduino
+關(guān)注
關(guān)注
189文章
6493瀏覽量
190228 -
LIDAR
+關(guān)注
關(guān)注
10文章
344瀏覽量
30187
發(fā)布評(píng)論請(qǐng)先 登錄
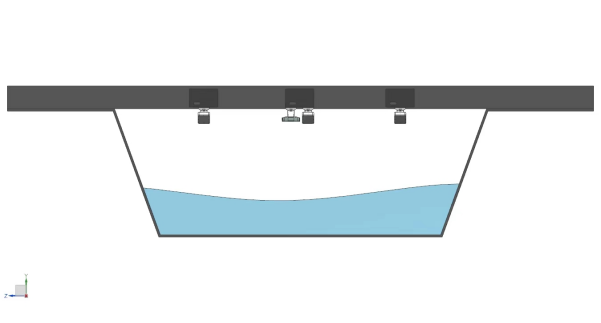
陣列雷達(dá)波測(cè)流系統(tǒng)工作原理詳解
SONY推出新型dTOF激光雷達(dá)(LiDAR)深度傳感器AS-DT1
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

雷達(dá)生命探測(cè)儀集二維雷達(dá)探測(cè)和陣列式雷達(dá)探測(cè)系統(tǒng)于一體


OLED 顯示雷達(dá)數(shù)據(jù)
開源項(xiàng)目!基于 Arduino 的 MIDI 架子鼓
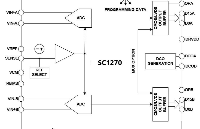
80MSPS模數(shù)轉(zhuǎn)換器SC1270兼容AD9269應(yīng)用于雷達(dá)/LIDAR





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論