") 激光雷達(dá)LIDAR的工作原理及特點(diǎn)應(yīng)用分析
激光雷達(dá)LIDAR的工作原理及特點(diǎn)應(yīng)用分析
最近Velodyne挑起的激光雷達(dá)LiDAR專利之戰(zhàn)成為了業(yè)界熱點(diǎn)。可以說在嚴(yán)苛的自動(dòng)駕駛系統(tǒng)中激光雷達(dá)成為一種不可替代的傳感器。今天讓我們?cè)敿?xì)聊聊激光雷達(dá)LIDAR是怎么回事。
什么是激光雷達(dá)LIDAR
激光雷達(dá)LiDAR的全稱為L(zhǎng)ight Detection and Ranging激光探測(cè)和測(cè)距,又稱光學(xué)雷達(dá)。
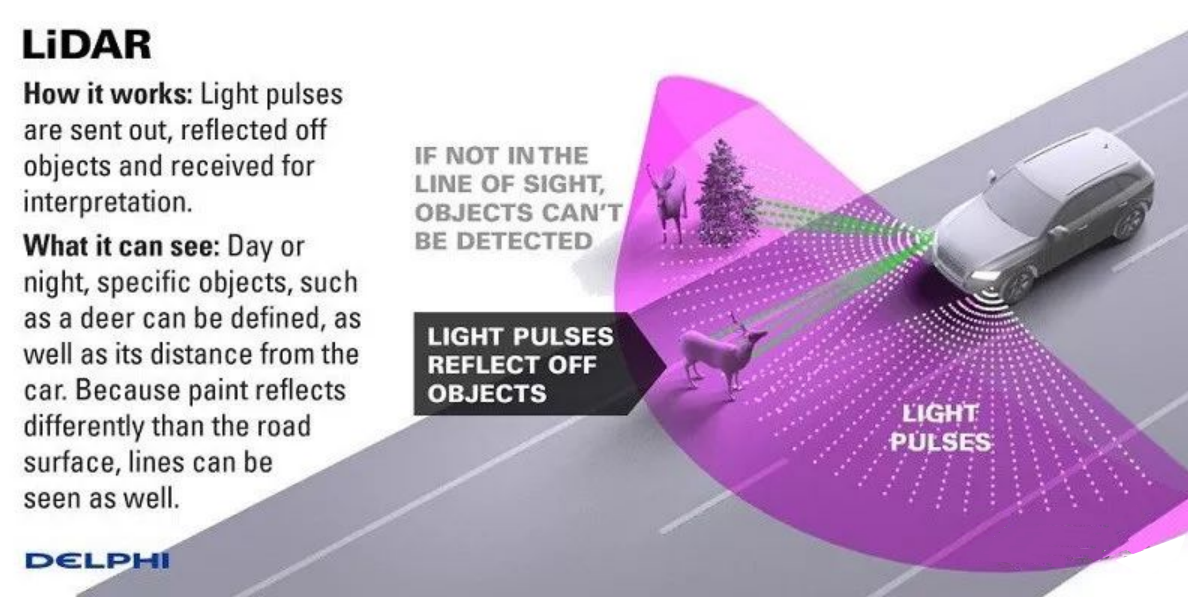
激光雷達(dá)的工作原理:對(duì)人畜無(wú)害的紅外光束Light Pluses發(fā)射、反射和接收來探測(cè)物體。能探測(cè)的對(duì)象:白天或黑夜下的特定物體與車之間的距離。甚至由于反射度的不同,車道線和路面也是可以區(qū)分開來的。哪些物體無(wú)法探測(cè):光束無(wú)法探測(cè)到被遮擋的物體。
激光雷達(dá)LiDAR示意圖
車用激光雷達(dá)工作原理就是蝙蝠測(cè)距用的回波時(shí)間(Time of Flight,縮寫為TOF)測(cè)量方法。但要知道光速是每秒30萬(wàn)公里。要區(qū)分目標(biāo)厘米級(jí)別的精確距離,那對(duì)傳輸時(shí)間測(cè)量分辨率必須做到1納秒。要如此精確的測(cè)量時(shí)間,因此對(duì)應(yīng)的測(cè)量系統(tǒng)的成本就很難降到很低,需要使用巧妙的方法降低測(cè)量難度。
是不是覺得很高深難懂?我們直接看動(dòng)畫吧。
激光雷達(dá)LiDAR工作原理
通過旋轉(zhuǎn)的機(jī)械鏡面測(cè)量激光發(fā)出和收到回波的時(shí)間差,從而確定目標(biāo)的方位和距離。由于激光雷達(dá)主動(dòng)發(fā)射激光,因此受環(huán)境光變化的影響小,測(cè)距精確。
什么是激光雷達(dá)LIDAR的技術(shù)關(guān)鍵
典型激光雷達(dá)LiDAR系統(tǒng)組成
典型激光雷達(dá)LiDAR系統(tǒng)組成括激光發(fā)射光源、接收器、伺服電機(jī)、斜面鏡和光學(xué)旋轉(zhuǎn)編碼器(又稱圓光柵)。
激光雷達(dá)LiDAR關(guān)鍵部件
激光雷達(dá)LiDAR關(guān)鍵部件按照信號(hào)處理的信號(hào)鏈包括控制硬件DSP(數(shù)字信號(hào)處理器)、激光驅(qū)動(dòng)、激光發(fā)射發(fā)光二極管、發(fā)射光學(xué)鏡頭、接收光學(xué)鏡頭、APD(雪崩光學(xué)二極管)、TIA(可變跨導(dǎo)放大器)和探測(cè)器。其中除了發(fā)射和接收光學(xué)鏡頭外,都是電子部件。隨著半導(dǎo)體技術(shù)的快速演進(jìn),性能逐步提升的同時(shí)成本迅速降低。但是光學(xué)組件和旋轉(zhuǎn)機(jī)械則占具了激光雷達(dá)的大部分成本。
激光雷達(dá)LIDAR的應(yīng)用挑戰(zhàn)
a. 繞不開的基礎(chǔ)專利
Velodyne激光雷達(dá)LiDAR基礎(chǔ)專利
第一大挑戰(zhàn)就是繞不開的Velodyne基礎(chǔ)專利。此次專利大戰(zhàn)的主角Velodyne可以說是美國(guó)政府通過自動(dòng)駕駛挑戰(zhàn)賽一手扶植起來的業(yè)界老大。2007年Velodyne申請(qǐng)的基礎(chǔ)專利US7969558囊括了幾乎所有高精度激光雷達(dá)所需的基礎(chǔ)技術(shù)。其實(shí)并不是針對(duì)國(guó)內(nèi)的禾賽和速騰聚創(chuàng),國(guó)外的谷歌Waymo和Uber都被拉進(jìn)了專利之爭(zhēng)。而禾賽目前已經(jīng)在北美是僅次于Velodyne的激光雷達(dá)供應(yīng)商。而速騰聚創(chuàng)則是國(guó)內(nèi)出貨量最高的激光雷達(dá)企業(yè)。可謂樹大招風(fēng)。
Velodyne激光雷達(dá)LiDAR基礎(chǔ)專利細(xì)節(jié)
該基礎(chǔ)專利不僅包括了主流的基于伺服電機(jī)機(jī)械旋轉(zhuǎn)光學(xué)組件,而且包括了之前提到的特殊信號(hào)處理原理。通過精確的激光發(fā)射時(shí)長(zhǎng)控制,來將對(duì)回波時(shí)間的測(cè)量轉(zhuǎn)化成單位時(shí)間進(jìn)光量的測(cè)量。從而在提高精度的同時(shí)降低設(shè)計(jì)難度。
b. 居高不下的成本
最早由谷歌提出的自動(dòng)駕駛汽車基于置于車頂?shù)?60度機(jī)械旋轉(zhuǎn)激光雷達(dá)實(shí)現(xiàn)。它的性能非常好,但是相應(yīng)的也具有成本過高(幾千美元級(jí)別),體積大、外部可見等劣勢(shì)。
因此激光雷達(dá)成本問題亟待解決,固態(tài)化成為大勢(shì)所趨。
激光雷達(dá)LIDAR市場(chǎng)應(yīng)用如何
1. Velodyne激光雷達(dá)汽車應(yīng)用
Velodyne激光雷達(dá)發(fā)展路線
Velodyne激光雷達(dá)廣泛應(yīng)用于自動(dòng)駕駛的測(cè)試車型中。最早谷歌提出的自動(dòng)駕駛汽車就是基于置于車頂?shù)臋C(jī)械旋轉(zhuǎn)激光雷達(dá)產(chǎn)品實(shí)現(xiàn)的。它其實(shí)就是來自Velodyne公司的64波束激光雷達(dá)。而這款產(chǎn)品當(dāng)初價(jià)格驚人的超過了7萬(wàn)美金。如圖,從左至右分別為Velodyne的64波束、32波束以及16波束激光雷達(dá)產(chǎn)品。
2. 法雷奧SCALA激光掃描傳感器汽車應(yīng)用
奧迪A8配備的低成本激光掃描傳感器
奧迪是目前唯一量產(chǎn)L3級(jí)別自動(dòng)駕駛車型的整車廠。為了應(yīng)對(duì)激光雷達(dá)量產(chǎn)的挑戰(zhàn),奧迪找到了一種更小巧的激光掃描傳感器方案。全新奧迪A8保險(xiǎn)杠處的一個(gè)圓弧狀傳感器是小型化激光掃描傳感器。在外形不需旋轉(zhuǎn)的前提下可以達(dá)到145度的水平視角,80米遠(yuǎn)的探測(cè)距離。其激光二極管每秒可發(fā)射近10萬(wàn)次紅外線脈沖,控制系統(tǒng)會(huì)根據(jù)紅外線脈沖的反射情況計(jì)算出前方物體的詳細(xì)輪廓。
激光雷達(dá)LIDAR未來發(fā)展方向
激光雷達(dá)LiDAR未來發(fā)展方向
未來通過半導(dǎo)體技術(shù)代替原來的機(jī)械旋轉(zhuǎn)部件和光學(xué)組件將是業(yè)界主流。在繞開基礎(chǔ)專利的同時(shí)可以大幅降低激光雷達(dá)的成本。其中高性能長(zhǎng)距離激光雷達(dá)將專注于基于半導(dǎo)體的微機(jī)械鏡頭控制激光發(fā)射光束的掃描。而中距離低成本方案則朝向固態(tài)Flash激光雷達(dá)的方向發(fā)展。接收部分為半導(dǎo)體光學(xué)探測(cè)陣列。通過類似攝像頭的接收點(diǎn)整,在采集圖像的同時(shí)記錄目標(biāo)的距離信息。
綜上所述,激光雷達(dá)技術(shù)正隨著自動(dòng)駕駛的興起引起廣泛關(guān)注。但是繞不開的基礎(chǔ)專利和居高不下的成本帶來諸多挑戰(zhàn)仍急需解決。無(wú)疑半導(dǎo)體技術(shù)將推動(dòng)激光雷達(dá)快速發(fā)展。讓我們拭目以待吧。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52722瀏覽量
764698 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4212瀏覽量
192251 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14245瀏覽量
169932
發(fā)布評(píng)論請(qǐng)先 登錄
常見激光雷達(dá)種類
激光雷達(dá)和相機(jī)之間的外參標(biāo)定
毫米波雷達(dá)VS激光雷達(dá)VS超聲波雷達(dá)
最佳防護(hù)——激光雷達(dá)與安防監(jiān)控解決方案
由iphone12說說激光雷達(dá) FMCW激光雷達(dá) 精選資料分享
激光雷達(dá)傳感技術(shù)的工作原理及其技術(shù)特點(diǎn)的分析
激光雷達(dá)傳感技術(shù)的工作原理和特點(diǎn)
LiDAR激光雷達(dá)技術(shù)原理及Arduino示例代碼糾錯(cuò)
汽車激光雷達(dá)是什么 工作原理是什么
簡(jiǎn)述激光雷達(dá)的結(jié)構(gòu)原理分類及特點(diǎn) TIM320激光雷達(dá)的工作原理
什么是激光雷達(dá)?LiDAR系統(tǒng)的工作原理及解決方案

激光雷達(dá)LIDAR基本工作原理

lidar激光雷達(dá)掃描儀有什么用
LIDAR激光雷達(dá)逆向建模能用到revit當(dāng)中嗎
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論