 喂魚器的制作教程
喂魚器的制作教程
步驟1:木制品

這臺機器主要是用木制零件制造的。在進行原型設計時,我喜歡使用木材,可以更換零件,尺寸可以更改,公差可以達到0.1mm,可以添加或填充孔。附件是模型,您可以用木頭制作它或者您可以打印它。
為了測試木制部件的幾何形狀,使用輕木。這種材料太軟,不能用于喂魚器。使用材料:
樺木膠合板500x250x1.0mm
樺木膠合板500x250x1.5mm
樺木膠合板500x250x2.0mm
樺木膠合板500x250x3.0mm
18mm膠合板
12x18mm桃花心木
步驟2:木制外殼





參見模型(01套管)
套管內置機械魚飼養者。它保護機器和電氣部件免受水族箱的潮濕。環氧樹脂外殼部分適合Juwel Easy Feed的標準Juwel水族箱進料孔。 Fish Feeder的頂部位于水族箱蓋的頂部。
用環氧樹脂制作外殼的選擇是因為:
環氧樹脂具有防水性。
可以目視檢查內部結構。
站在水族箱前面時,只有抬起蓋子才能看到喂魚器。
為了使套管頂部不太明顯,我畫了它是黑色的。
為透明環氧樹脂外殼涂上4x L型材。
外殼的底部是環氧樹脂盒外殼(透明環氧樹脂盒外殼)。
制作外殼后應鉆底孔。
制作外殼后應鉆電連接器孔。 (未繪制,未決)。
必須除去環氧樹脂外殼的多余材料并研磨至所需高度。
底殼的沙頂。在頂部和底部之間需要一個小間隙。安裝零件需要很小的壓力。
在環氧樹脂膠合到套管之前,應涂上頂部。
用機器驗證2x2和10x2的厚度。
步驟3:木工蓋和艙口



參見型號(02 Cover&04 Hatch)
蓋子滑入外殼頂部。蓋子有一個方孔。當滑入機殼頂部時,機器被覆蓋,筒倉可以進入。艙口滑入蓋子。向料倉添加飼料時,只需清除小部件。為了增加蓋子的抓地力,在頂板上鉆一個孔。
將零件鋸成所需的尺寸。
粘貼2個組件。
使用外殼安裝組件。
繪制裝配體。
步驟4:木工內件





參見模型(03內部)
內部木制品用于飼料的料倉,線性執行器,刀閥,EL板,開關和紅外光柵。除非另有說明,否則確保零件準確且直角膠合。完成并安裝好所有部件后,將其滑入外殼中。
在堆疊軸承孔的情況下鉆孔,以獲得完美的孔對齊。
涂上環氧樹脂后,軸承孔較小。再次鉆孔。使用一些輕微的壓力將軸承壓入位置壓力。
制造其他木制部件。
膠水組裝led框架。用環氧樹脂涂料。在機器內部時,某些區域難以涂漆。
涂上環氧樹脂后,孔越小。檢查紅外線LED和紅外光電二極管是否適合孔。如有必要,再次鉆孔。
繪制內部構件和框架作為單獨的程序集。
使用刀閥檢查尺寸以確保緊密配合。
3.5mm膠合2mm和1.5mm板材。
步驟5:Knifevalve




參見模型(05 Knifevalve)
考慮提交食物的幾種方案,見第一表:
帶艙口閥的旋轉容器。要做到這一點并不容易。
螺絲(鉆頭)。喂食器位于水族箱內,正好位于水位之上。螺桿中的食物會暴露在潮濕環境中。食物會粘在螺絲上,堵塞輸出。
刀閥(滑動)
刀閥系統如何工作?
步驟0 :閥門的正常位置。這是機器處于非活動狀態時閥門的正常位置。食品容器閥門關閉。水族箱閥門關閉。
步驟1 :食物閥正在移動以獲得一批食物。注意食物閥孔直徑較小。這是為了確保水族箱閥門能夠移動整批產品。
步驟2 :食物閥已裝入并正在移動到光柵。
步驟3 :食物通過光柵落下并進入水族箱閥門。水族箱閥門正在向出口移動。
步驟4 :食物通過出口落入水族箱的水中。水族箱閥門向后移動,使機器關閉。
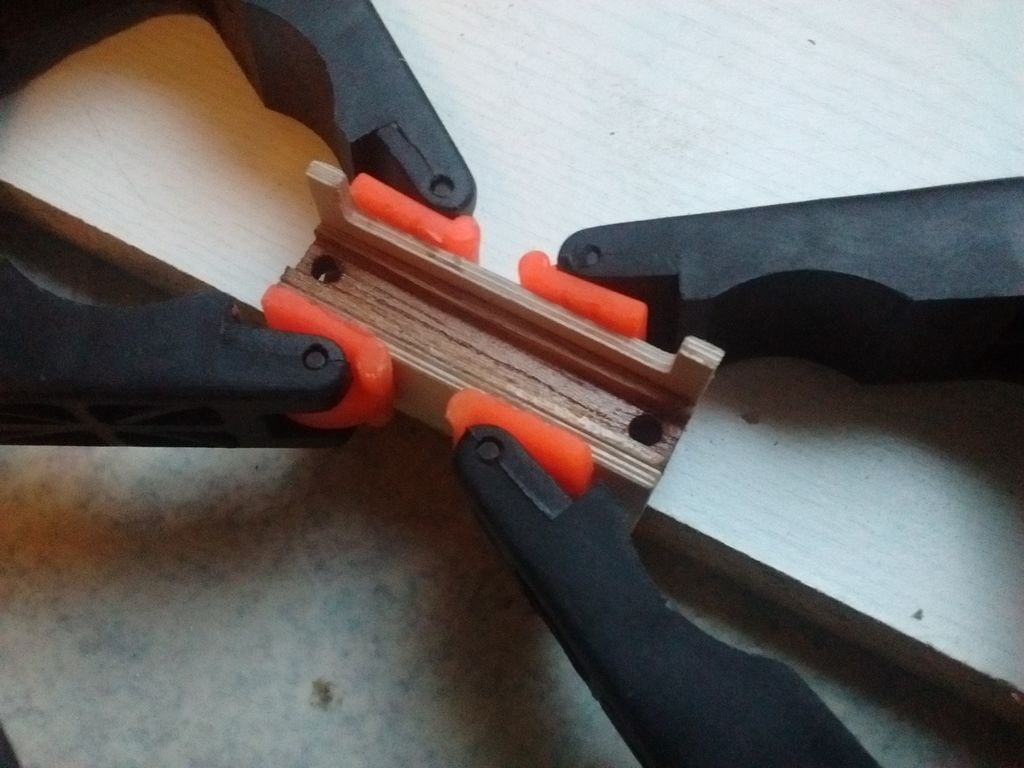
步驟6:木工刀具








參見模型(05 Knifevalve)
頂刀閥的孔徑為8mm,底刀閥的孔徑為10mm。
檢查厚度,使用模具將閥門環氧樹脂涂到合適的厚度。
在合適的厚度下,使用Commandant M5(刮除器)使滑動面光滑。
黃銅螺母粘在方形10x10 L = 15塊上。直徑約7mm。安裝螺紋桿,黃銅螺母和刀閥后,將黃銅螺母粘在刀閥上。小心不要在線上灑上環氧樹脂。
當黃銅螺母被膠合時,用更多環氧樹脂填充螺母和塊之間的間隙。
步驟7:木工電機夾具和支撐





參見模型(06 Motor Clamp&Support)
電機夾和支架用于定位步進電機。當步進電機被夾緊時,軸是唯一的旋轉部件。
電機支架用于內部組件并粘在機器內部。將電機支架與步進電機對準,以便完美貼合。
電機夾是一個松動的部件,用螺栓固定在機器的內部。
為了確保電機支架和電機夾是完美的配合,這兩個部件應由1件18mm膠合板制成。要鉆孔,請使用立柱鉆孔機。這些孔應完全垂直。
制造:
鉆大?20孔。
鉆小孔。
看到夾具和支撐的輪廓。
將電機夾減薄至10mm。
步驟8:電子設備
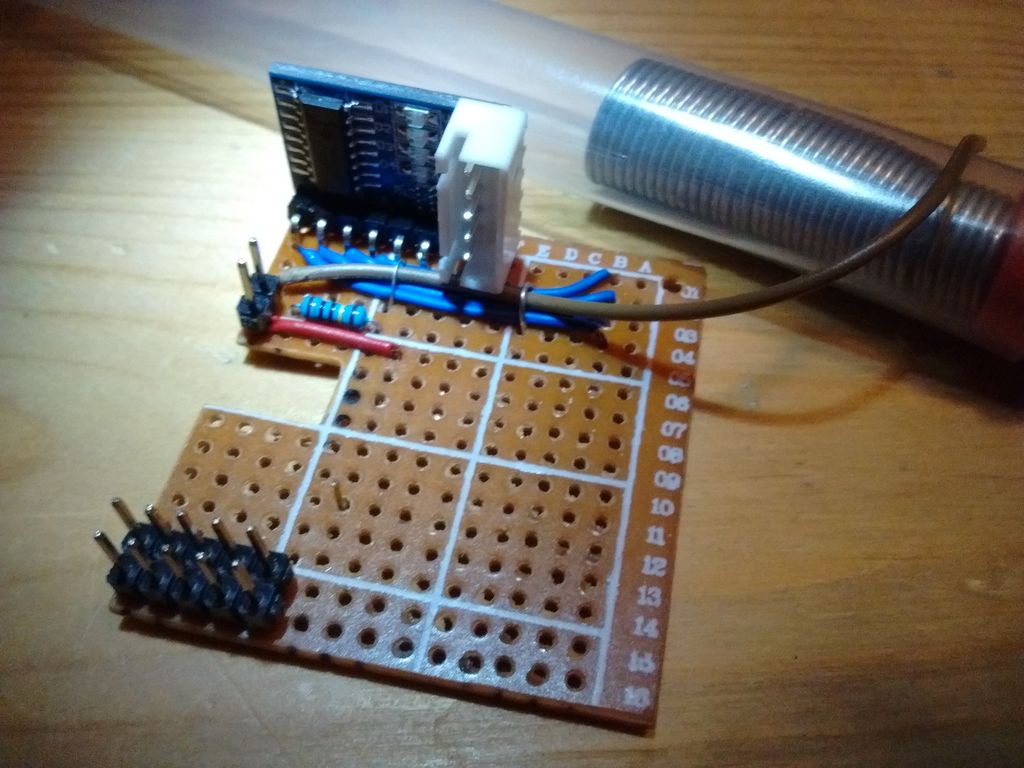



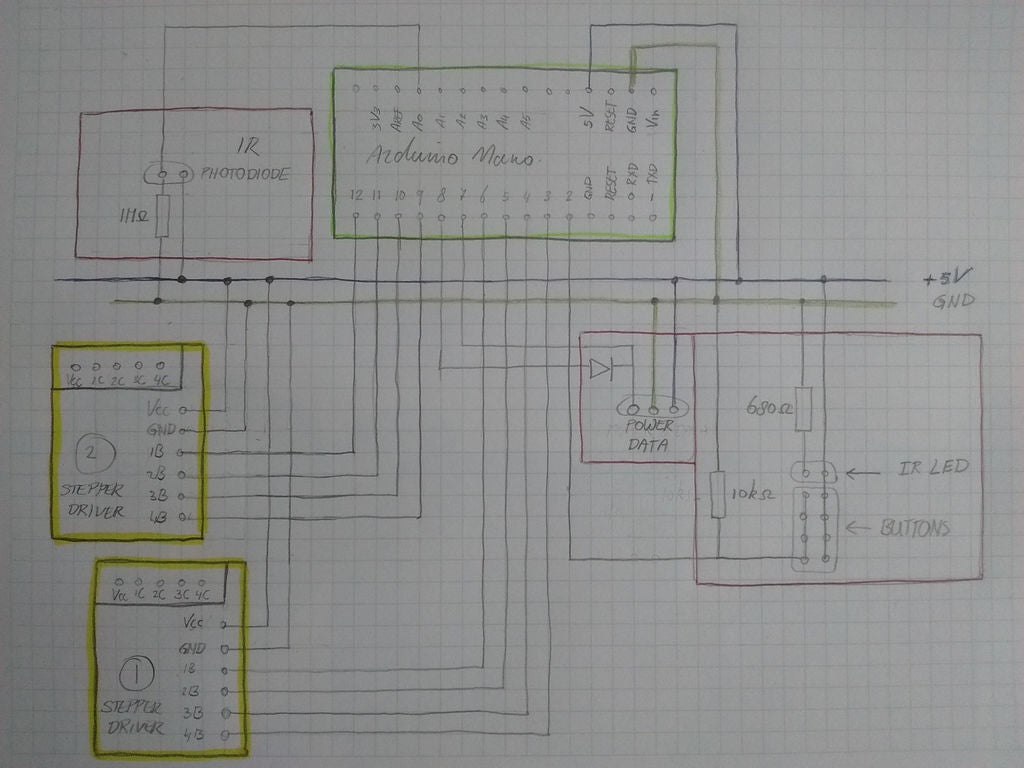
參見模型(99 El-board)
參見原理圖:perfoboard有一個連接器,為+ 5V導軌和GND導軌供電。第三個引腳是數據線。這些引腳連接到行星板上的大腦:Arduino nano。始終確保引腳和Arduino上電源線的正確極性。為避免Arduino數字引腳數據輸出電壓,引腳受二極管保護。 Arduino從數據線讀取命令,通過驅動器控制閥門步進電機,檢查開關和IR光電門。
零件:
1x Perfoboard 43x39mm
1x Arduino nano
2x ULN2003 mini
1x二極管(例如1N4148)
1x電阻器1M
1x電阻器10k
1x電阻680
1x 2針公頭(光電二極管)
1x 3針公頭(電源,數據,接地)
2x 5針公頭
電線
還需要一些工具:鑷子,刀具,虎鉗,烙鐵,燈芯,支架。
如何焊接:https://learn.adafruit.com/adafruit-guide-excelle 。..。注意安全風險并使用個人防護設備。
制造:
將鉆孔板鋸成所需尺寸。
彎曲步進驅動器和Arduino的引腳。小心點!
切斷第一個步進電機驅動器的(藍色)線。將導線放置到位,參見圖紙,將針腳步進電機4B連接到Arduino D12,3B到D11,2B到D10,1B到D9。將驅動器按壓到位,焊接接頭步進驅動器4B,3B,2B,1B。不要焊接GND和VCC。
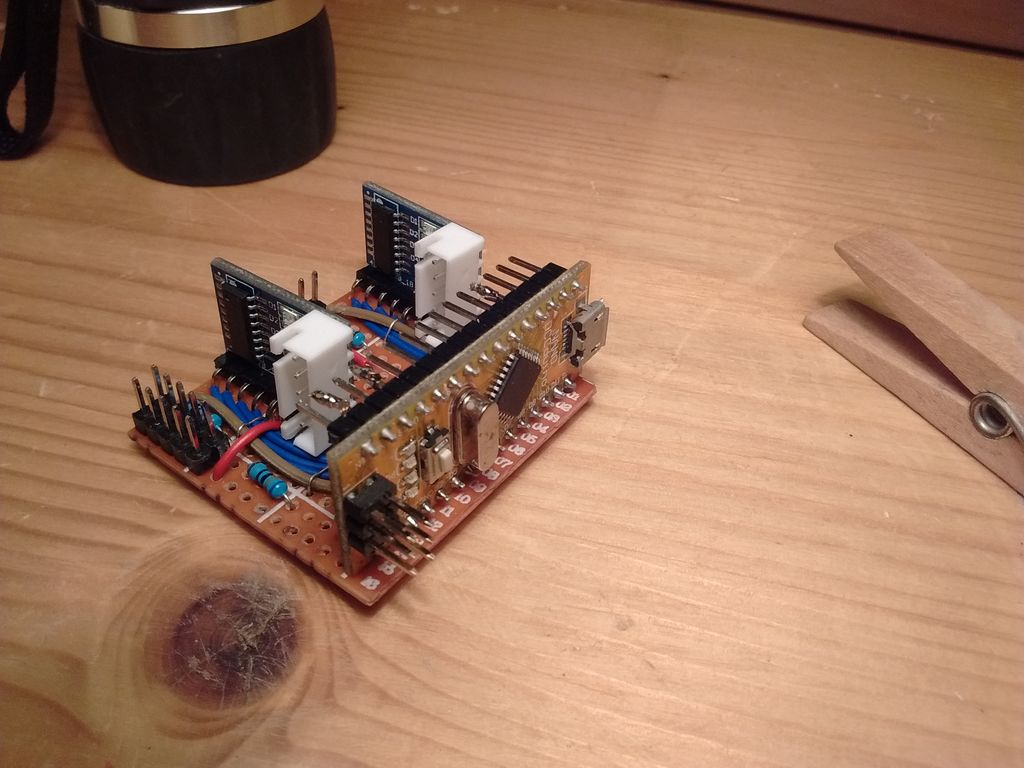
在N5和N6處添加IR光電二極管的連接器。 N5到Arduino A0的引腳。接線電阻1M至N5和J5。用紅線將N6到I6的引腳固定。
切斷第二步進電機驅動器的(藍色)導線。將導線放置到位,參見圖,將針腳步進電機4B連接到Arduino D6,3B到D5,2B到D4,1B到D3。將驅動器按壓到位,焊接接頭步進驅動器4B,3B,2B,1B。不要焊接GND和VCC。
在J15到K16添加開關的連接器。在N14到N15,M15,L15,K15的導線電阻10K,將其他導線連接到J14。將N14連接到Arduino D2。
在J15和J16添加LED連接器。 H15至J15的導線電阻器680將另一導體導線連接至E15。
在D5到7處添加數據連接器 - + 5V - GND。從B5到D5的Arduino D8連接二極管。將Arduino D7連接到B6到D5。
添加電源軌+ 5V和GND線。
按下并將Arduino焊接到位。
焊接連接。
從底部去除多余的材料(針腳)。
在裸線上涂抹環氧樹脂。
測試(參見示意圖和程序及視頻Fish Feeder 2測試電子設備):
將按鈕,IR LED,IR光電二極管連接到perfoboard,將測試程序上傳到Arduino。
通過在LED和光電二極管之間滑動一張紙來測試紅外門的感光度。
按下按鈕測試按鈕和驅動程序。
步驟9:步進電機



參見型號(98 Linear Actuator,98 Linear Actuator.step,98 Linear Actuator.pdf)
參見線性執行器步進電機
步進電機移動閥門。向右轉動將閥門拉向電機并關閉閥門。向左轉動將閥門推到打開位置。為了確保最佳功能,閥門,車軸,軸承,聯軸器和電機必須完美匹配。
一個步進電機控制筒倉刀閥。另一個步進電機控制套管刀閥。
零件:
M5不銹鋼螺紋
M5螺母
接地連接器
滾珠軸承內徑?5mmMF105ZZ 5x10x4
步進電機20BYJ46軸?5mm,平面。
收縮管
安裝步進電機
將軸承壓入軸承孔(壓入配合)。
定位刀閥。
在軸承中插入“非電機側”的螺紋。
在螺紋“非電機側”上插入螺母。
將螺紋插入黃銅螺母刀閥。
在“電機側”的螺紋上插入螺母。
將螺紋插入“電機側”的軸承中。
插入耦合“接地連接器”。
將支架上的步進電機插入聯軸器。
使用電機夾夾緊步進電機
定位螺母,順時針旋轉一個,逆時針旋轉一個,使位置永久。
將El-board插入隔間。
從步進電機線上取下白色插頭,不要取下金屬導線。
將步進電機連接到驅動器。使用收縮管以避免短路。
使用測試程序“20171210測試ULN2003 serialread 2 steppermotors.ino”來檢查正確的對齊步進電機,軸,軸承和閥門。打開計算機和Arduino之間的串行線。使用鍵盤,鍵“2”,“3”,“5”,“6”移動閥門。
為套管添加孔。見木工套管和閥門。
步驟10:電源和數據輸入









參見模型(97 Power Data Plug插座,97電源數據插頭Socket.step,97電源數據插頭Socket.pdf)
此電纜為電子設備提供電源并提供數據線。環氧樹脂和O形圈應提供防水連接。
零件:
經典自行車(Dunlop)閥門(見https://en.wikipedia.org/wiki/Dunlop_valve)
2x閥門螺母
M8墊圈
O形圈?7-?15
3.5mm耳機3極插頭
6.35mm 3極插頭
?6電線(棕色,藍色,綠色/黃色0.75mm2)
3.5mm tubestyle 3極插頭螺母
收縮管
環氧樹脂
制造:
從閥桿上取下橡膠。
移除3.5毫米音頻插頭的螺紋部分。
滑動電纜上3.5mm插頭的背面。
在電線上滑動閥桿。
將電線的導線切成一定長度,見表“尖端,環和套管”。
焊接導體至3.5mm插頭。
使用收縮軟管和環氧樹脂進行防水連接。
將閥桿滑動至3.5mm插頭。
焊接導線至6.35mm插頭。
將焊線連接至3.5mm管式插座。
在套管中添加螺母孔。
在外殼中使用環氧水密的膠水螺母。
按照圖紙鋸木制零件。
將木制部件粘到內部。使用3mm和2mm填充板。
步驟11:光隔離單線通信



參見光隔離單線通信
由于魚飼養器可能存在潮濕問題,我希望在外界和魚飼養器之間隔離數據和電源在水族館里面。
光學單元的一側有四根電線。這一面與外界聯系在一起。四根線連接到Arduino或Raspberry PI的電源,接地,數字引腳(數據輸入),另一個數字引腳(數據輸出)。這個Instructable使用Arduino和PC作為主設備。
另一側有一個獨立的電源連接到電源插座。數據和電源通過連接到6.3mm 3極音頻插座的電源和數據線傳輸。電源線和數據線在另一側連接到Fish Feeder內部的3.5mm插座,El-board和Arduino nano作為從屬設備。
部件:
電源+ 5V
插座電源
Perfoboard 5x7cm
2x電阻470Ω
1x電阻680Ω
2x電阻1kΩ
2x二極管(例如1N4148)
2x光耦器EL817
LED
引腳插頭母2腳
針頭母頭3針
針頭母頭4針
圓頭母頭6針
圓頭母頭4針
6.35 mm音頻3極插座
塑料外殼
制造:
焊接電路符合指示。
參見原理圖,連接GND外部和+ 5V外部電源插座。
根據尖端,環形和套管布局電纜,參見原理圖,連接+ 5V2,GND2,數據輸入/輸出到6.35mm 3極音頻插座。
參見原理圖,將面包板線連接到IN,GND1,OUT和+ 5V1。
在套管中鉆孔。
在套管中安裝插座。
使用綁帶修復面包板線。
步驟12:內部電器





此步驟包含一些小型硬件部分。請注意,某些部件沒有按預期運行,因此這些部件會更新。
零件:
IR led
紅外光電二極管
電線
耳機線
Shrinkhose
4x SDS004
4x傳感器/開關安裝板
耳機插孔
耳機插座(3.5mm,3導線),見步驟10,是一種典型的管式插座,帶有用于面板安裝的螺紋端。將插頭轉入外殼時,插頭開始插入插座。在一定量的轉動之后,插頭應該完全連接到插座。當測試插座開始隨插頭轉動時。實現了良好的聯系。缺點是連接到插座的3根電線被扭曲并卡在EL板上。幸運的是沒有任何損壞。我決定在插座的螺紋上做一個平坦的表面,在插座的安裝板上做一個圓形的部分。
制造耳機插座:
提供一個平面至3.5mm管式插座。平坦表面應盡可能為方形。
使用1至1.5毫米的木條并開始將其呈圓形以填充間隙。確保它很合適。
將圓形段粘貼到插座孔安裝板上。
用環氧樹脂完成安裝板。
將插座和安裝板連接到EL板上。
IR Led
LED位于框架中,見圖紙木工內件。 LED直接從EL板接收電源。當EL板供電時,LED有電并發出紅外光。 IR導光板是紅外光柵的一部分,參見可光刻的紅外光柵。
制造紅外光導:
焊料導向導線,長導紅,短暫導致黑色。
添加收縮軟管。
將連接器添加到電線。
插入外殼中。
連接EL板。
開關
開關用于限制線性執行器的運動。按下開關時,線性執行器應停止移動。
第一個設計有按鈕。缺點是按下按鈕(數字引腳“HIGH”)按鈕無法進一步移動。這會給按鈕,螺紋,螺母和步進電機帶來壓力。
經過搜索,我發現了C&K的一些便宜而簡單的開關SDS004。您需要一個小的力將開關推到“ON”,引腳可以進一步移動并且仍然是“ON”,請參見數據表中的超行程。可以在Mouser.com上找到此開關。在內部添加一個支撐以定位開關,它可以觸及閥門上的凹口,參見圖紙。
在此設置中有4個開關。我訂購了一些。開關非常小。在第一次嘗試時,將耳機線焊接到開關,我完全炸掉了開關。使用耳機線是因為線的股線是絕緣的。沒有外部橡膠的裸線非常薄,可以穿過紅外光柵孔。
要在開關耳機線之間建立良好的連接,需要準備耳機線。耳機線上的著色是絕緣。這可以通過打磨或燃燒來消除。通過鍍錫烙鐵并在烙鐵和木質表面之間按壓電線,絕緣材料將被燒掉。慢慢來,當焊料向上流動時你就可以了。在施加焊料之后,鍍錫線可以彎曲成U形。這可以掛在開關的引腳上。重新熔化焊料,以便與開關牢固連接。
制造開關:
環氧膠檢測器支持,見圖紙
使用耳機線(隔離線股)。
按下電線上的焊鐵,等待電線日曬開始融化。
在焊絲上涂抹焊料。焊料流入電線。
將電線的鍍錫部分彎曲成U形。
將U形連接到交換機的連接器。
使用烙鐵將鍍錫線熔化到連接器上。
用萬用表檢查關節。
將耳機線穿過紅外光柵孔。
添加收縮軟管。
將連接器添加到電線。
膠水傳感器就位(不要使用環氧樹脂,這會流入傳感器)
將連接器連接到EL板。
IR光電二極管
光電二極管是紅外光電探測器的另一部分。它也位于框架中,見圖紙木工內件。它位于紅外線的對面
當食物通過紅外線時,它會干擾光束。這由IR光電二極管檢測,參見IR Photogate。 IR光電二極管以反向偏壓模式連接。
制造光電二極管:
焊料導向導線,短導紅色,長導黑色。
添加收縮軟管。
將連接器添加到電線。
將光電二極管插入外殼。
連接到EL-Board。
步驟13:程序


當部件的制造準備就緒時,可以上傳程序。
將master.ino上傳到連接到PC和光路的Arduino。
slave.ino上傳到FisFeeder 2內的Arduino nano。
上傳程序時:
Connect送料器的電源/數據線。
將電源/數據線連接到光纖電路。
將Arduino連接到光纖電路。
將Arduino連接到PC。
在PC上打開Arduino串行監視器。
將電源連接到optcal電路。
現在Fish Feeder上線了。在PC串行監視器上讀取通信。
運行設置和校準程序非常重要。
運行設置以確定閥門的反沖和位置。
運行校準程序,檢查存儲的值,并在必要時進行調整。
完成設置和校準程序后,值將永久存儲在EEPROM。當魚飼料器重新供電時,讀取并重新使用存儲的值。現在喂魚器已經準備好喂魚了。
編程已經可以使用了。您可以添加計時例程或其他選項。另請閱讀Slave程序中的注釋。
結論:大多數設計目標都得到了滿足。與Raspberry的連接尚未準備好。目前,該系統具有功能性并經過耐久性測試。
-
Arduino
+關注
關注
188文章
6478瀏覽量
188288
發布評論請先 登錄
相關推薦
GUC65(A)礦用本安型位置傳感器制作過程
了解和使用GNU Radio軟件的功能并制作藍牙抓包器
AIGC在視頻內容制作中的應用前景
電源變換器的制作步驟包括哪些?
光刻掩膜版制作流程
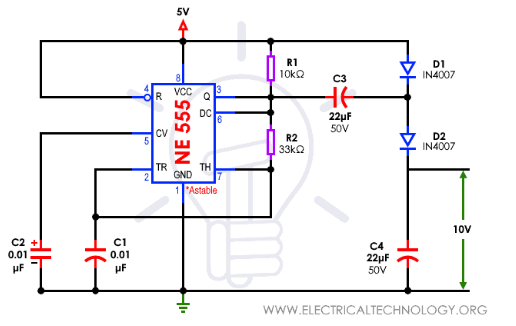
如何使用555定時器制作電壓倍增器電路
PCB電路板設計與制作的步驟和要點
如何用Arduino制作一個簡易自動喂魚器
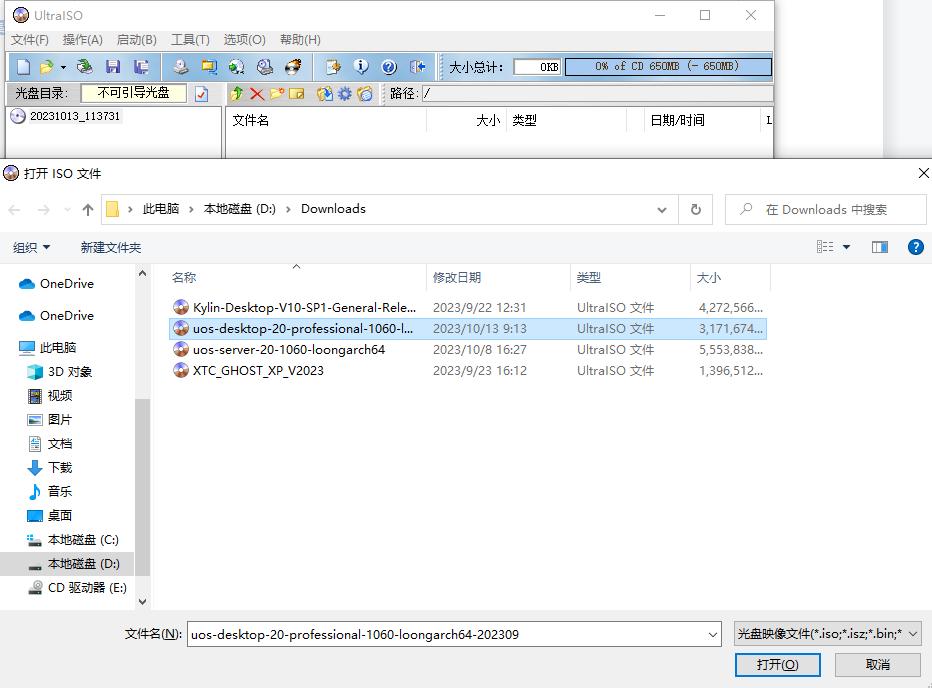
UltralIOS制作啟動盤步驟
應用單片機開發的ST LINK調試器設計制作






 工商網監
工商網監
評論