 Arbotix臂式分揀機帶輸送機的制作
Arbotix臂式分揀機帶輸送機的制作

步驟1:零件和要求
對于此構建,您需要:
- PhantomX Pincher Robot Arm Kit Mark II
- Pixy CMUcam5帶安裝硬件ASM-PIXY-CAM
- Robot Geek Large Workbench ASM-WRKBL
- 2x RobotGeek Relay ASM -RG-RELAY
- 2x RobotGeek按鈕ASM-RG-PUSHBUTTON
- RobotGeek 300mm 3針傳感器電纜(傳感器附帶)
- 袋裝M3x10 F/F支架(至少20個)
- M3x6螺栓(至少40個)
您可以在http://www.trossenrobotics.com/
- 輸送機(直接控制或通過變頻器。我們使用Allen-Bradley PowerFlex40)
- 一些布線將輸送機連接到繼電器,繼電器連接到控制電源
- 顏色鮮艷或顏色編碼的物體。
步驟2:預裝配
首先,需要安裝所需的軟件和硬件。在這個鏈接中,給出了幾個如何以正確的順序安裝pincher arm機器人的指南:
http://learn.trossenrobotics.com/interbotix/robot -。..
您還需要為pixy相機安裝所需的軟件和庫。這里給出了關于如何實現這一點的完整解釋。
http://cmucam.org/projects/cmucam5/wiki
http://cmucam.org/projects/cmucam5/wiki/Hooking_up_Pixy_to_a_Microcontroller_(like_an_Arduino)
一旦你安裝了手臂和攝像頭并使其全部啟動并運行,就可以繼續這個項目了。
步驟3:主裝配
現在是時候將所有零件裝配到大型工作臺上。
使用提供的螺栓將所有組件安裝到主板上的支架。
這個位置并不是非常重要,但保持一些整潔和間隙是很好的,這樣你可以在以后添加電纜,其中傳感器電纜將完美地安裝在板上的槽中。
為了便于使用和修改,我們將機器人控制器從機械臂上的位置移到了板上。它有更多的間隙,通過短電纜,我們可以將pixy相機和所有其他相連接到控制器。
第4步:布線
這里展示了如何連接所有組件以便它可以執行任務。
robotix m控制器有多種引腳可供您插入各種設備。
查看圖像說明以獲取更多信息。
步驟5:獲取程序
包含2個zip文件,您需要使用您安裝的arduino軟件打開這些文件,同時按照夾臂組裝指南。
此處包含2個程序,一個是測試文件,可讓您放松,緊張并測量當前的電機位置。這對于進行姿勢然后保存設置非常有用,因此您可以在其他程序中使用它。
其他程序是主程序。除非所使用的部件完全相同,否則在為您自己的設置設置姿勢之前將無法正常工作。
步驟6:讀取和保存姿勢
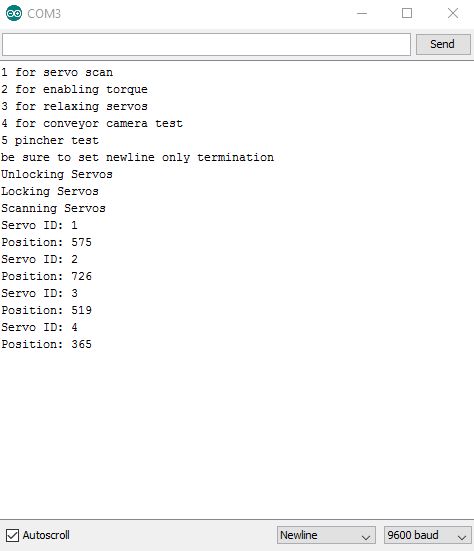
運行位置讀取器程序后,單擊右上角的放大圖標打開串口監視器。
這里有多個您可以測試和檢查的選項。
您可以放松舵機,然后用手移動它,使其處于您想要的位置。然后再次擰緊伺服系統,然后可以測量電機的位置。那么
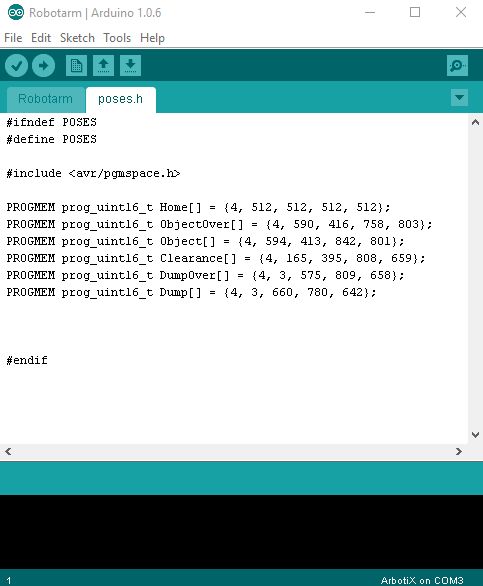
所有姿勢的數據都包含在poses.h文件中,該文件位于robotarm文件夾內。
姿勢如下:
Home =默認位置,默認情況下直接上升
ObjectOver =在抓取之前將鼠標懸停在對象上方
對象=圍繞物體的手臂,可以抓住這個位置
清除=它將采取的另一個姿勢,以避免任何障礙物
DumpOver =懸停在傾銷點
轉儲=在轉儲點,將在此位置釋放
第7步:使用Pixy并測試Pixy
如果你在pixy相機上檢查了wiki,你可能已經注意到了這個鏈接。
使用這個你可以看到你要過濾的對象out。
要過濾掉的對象應設置為簽名1,
要忽略的對象應設置為signat 2或更多。
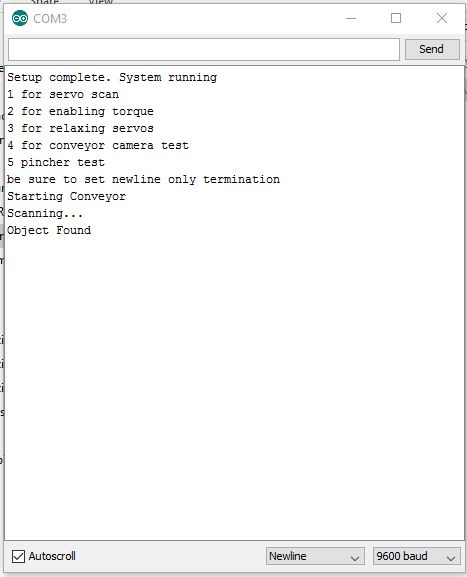
將pixymon設置為默認程序。您可以再次運行位置讀取器并使用傳送帶相機測試功能。這將運行傳送帶,直到相機檢測到物體。一旦檢測到物體,它就會停止。
它停止的位置也是輸送機停在主程序的位置。因此,您可以將該點用作手臂拾取物體的點。你必須設置你的姿勢才能考慮到這一點。
第8步:做得好!

一旦你設置了所有姿勢,并考慮到停止位置。并設置了pixy相機以使用您準備好的系統!
您現在可以運行主程序并將其與彩色對象一起使用。一些姿勢可能首先需要調整,但不應該花太長時間。
責任編輯:wv
-
傳感器
+關注
關注
2565文章
52954瀏覽量
767018 -
輸送機
+關注
關注
0文章
76瀏覽量
11233
發布評論請先 登錄

雙電機驅動超大傾角膠帶輸送機的控制算法


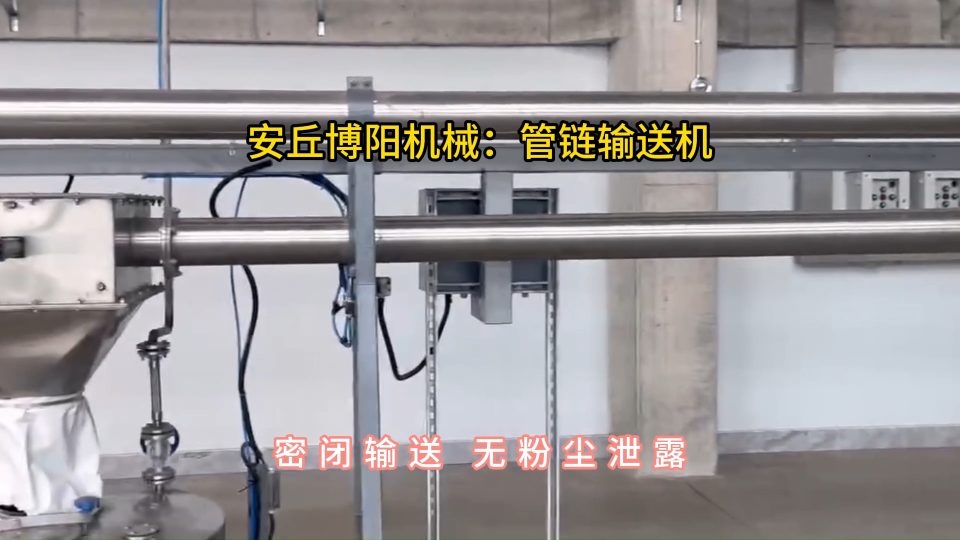
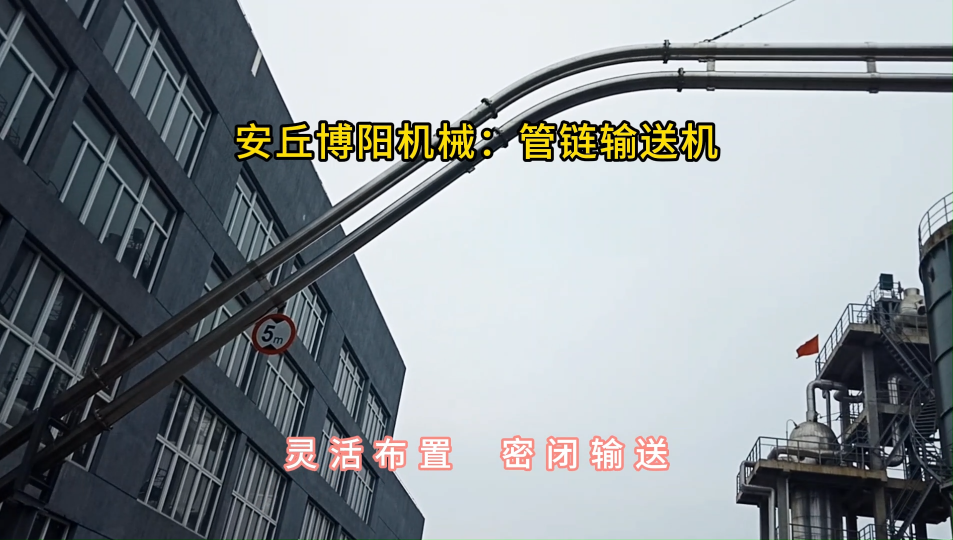

工業氧化鎂管鏈輸送機 無塵管鏈式粉料輸送機性能

皮帶輸送機監測預警物聯網系統
輸送帶保護裝置SMPP03-CAN-W兩級跑偏開關適用范圍
【?嵌入式機電一體化系統設計與實現?閱讀體驗】+磁力輸送機系統設計的創新與挑戰
防偏保護 KPT120-35兩級跑偏開關用于檢測輸送帶的運行狀態
高空輸送機遠程監控運維管理系統解決方案






 工商網監
工商網監
評論