") 如何用Arduino Uno和游戲桿制作PC鼠標(biāo)
如何用Arduino Uno和游戲桿制作PC鼠標(biāo)
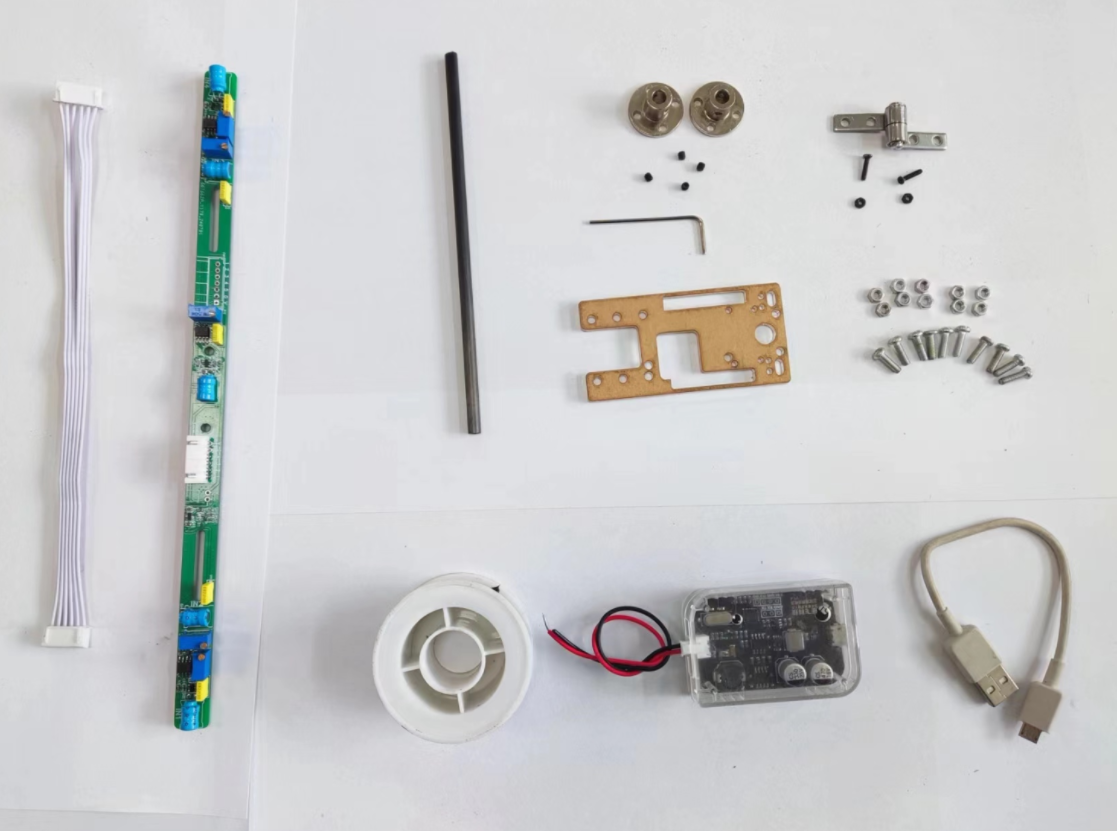
第1步:材料
這個(gè)項(xiàng)目不需要很多材料:
1 Arduino Uno
5對公對母線
5對母對母線(連接到操縱桿模塊并添加操縱桿的延伸長度。
1個(gè)操縱桿(我使用了SainSmart PS2游戲桿模塊,并且會(huì)推薦它)
步驟2:設(shè)置Arduino Uno
Uno的設(shè)置可以在材料圖片,以及這里的說明:
將五根母頭線連接到操縱桿模塊的引腳上。現(xiàn)在,將五根公頭線連接到母線的末端并將它們連接到這樣的Arduino:
1.操縱桿上的地面到Arduino Gnd
2.操縱桿上的+ 5V到Arduino 5V
3。操縱桿上的UPx到Arduino上的A0
4.操縱桿上的UPy到A1
5. SW引腳(數(shù)字式點(diǎn)擊開關(guān))到數(shù)字引腳7上Arduino
第3步:上傳Joysti ck程序到Arduino
將Uno連接到你的PC并上傳這里看到的操縱桿代碼(請注意我最初沒有創(chuàng)建這個(gè)代碼):
int pushPin = 7; // potentiometer wiper (middle terminal) connected to analog pin 3
int xPin = 0;
int yPin = 1;
int xMove = 0;
int yMove = 0;
// outside leads to ground and +5V
int valPush = HIGH; // variable to store the value read
int valX = 0;
int valY = 0;
void setup()
{
pinMode(pushPin,INPUT);
Serial.begin(9600); // setup serial
digitalWrite(pushPin,HIGH);
}
void loop()
{
valX = analogRead(xPin); // read the x input pin
valY = analogRead(yPin); // read the y input pin
valPush = digitalRead(pushPin); // read the push button input pin
Serial.println(String(valX) + “ ” + String(valY) + “ ” + valPush); //output to Java program
}
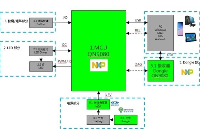
步驟4:設(shè)置Java程序
現(xiàn)在已經(jīng)設(shè)置了Uno,我們需要將它連接到我的Java程序,該程序能夠獲取Uno的串行輸出值特殊庫RxTx并使用庫集合JNA移動(dòng)鼠標(biāo)。這兩個(gè)庫都包含在此步驟結(jié)束時(shí)供下載。請注意,我從示例RxTx中更改的代碼的唯一部分是添加了以我為操縱桿校準(zhǔn)的方式移動(dòng)鼠標(biāo)的方法。它有點(diǎn)粗糙,但它符合我的目的。
我使用BlueJ作為我的IDE,但無論你使用哪種Java IDE,都要為這個(gè)項(xiàng)目安裝RxTx和JNA庫,我將其命名為“Mouse”。完成后,創(chuàng)建一個(gè)項(xiàng)目并包含以下代碼:
import java.awt.*;
import java.awt.event.InputEvent;
import java.io.BufferedReader;
import java.io.InputStreamReader;
import java.io.OutputStream;
import gnu.io.CommPortIdentifier;
import gnu.io.SerialPort;
import gnu.io.SerialPortEvent;
import gnu.io.SerialPortEventListener;
import java.util.Enumeration;
public class Mouse implements SerialPortEventListener {
SerialPort serialPort;
/** The port we‘re normally going to use. */
private static final String PORT_NAMES[] = {
“/dev/tty.usbserial-A9007UX1”, // Mac OS X
“/dev/ttyACM0”, // Raspberry Pi
“/dev/ttyUSB0”, // Linux
“COM4”, // Windows**********(I changed)
};
/**
* A BufferedReader which will be fed by a InputStreamReader
* converting the bytes into characters
* making the displayed results codepage independent
*/
private BufferedReader input;
/** The output stream to the port */
private OutputStream output;
/** Milliseconds to block while waiting for port open */
private static final int TIME_OUT = 2000;
/** Default bits per second for COM port. */
private static final int DATA_RATE = 9600;
int buttonOld = 1;
public void initialize() {
// the next line is for Raspberry Pi and
// gets us into the while loop and was suggested here was suggested http://www.raspberrypi.org/phpBB3/viewtopic.php?f.。.
//System.setProperty(“gnu.io.rxtx.SerialPorts”, “/dev/ttyACM0”); I got rid of this
CommPortIdentifier portId = null;
Enumeration portEnum = CommPortIdentifier.getPortIdentifiers();
//First, Find an instance of serial port as set in PORT_NAMES.
while (portEnum.hasMoreElements()) {
CommPortIdentifier currPortId = (CommPortIdentifier) portEnum.nextElement();
for (String portName : PORT_NAMES) {
if (currPortId.getName().equals(portName)) {
portId = currPortId;
break;
}
}
}
if (portId == null) {
System.out.println(“Could not find COM port.”);
return;
}
try {
// open serial port, and use class name for the appName.
serialPort = (SerialPort) portId.open(this.getClass().getName(),
TIME_OUT);
// set port parameters
serialPort.setSerialPortParams(DATA_RATE,
SerialPort.DATABITS_8,
SerialPort.STOPBITS_1,
SerialPort.PARITY_NONE);
// open the streams
input = new BufferedReader(new InputStreamReader(serialPort.getInputStream()));
output = serialPort.getOutputStream();
// add event listeners
serialPort.addEventListener(this);
serialPort.notifyOnDataAvailable(true);
} catch (Exception e) {
System.err.println(e.toString());
}
}
/**
* This should be called when you stop using the port.
* This will prevent port locking on platforms like Linux.
*/
public synchronized void close() {
if (serialPort != null) {
serialPort.removeEventListener();
serialPort.close();
}
}
/**
* Handle an event on the serial port. Read the data and print it. In this case, it calls the mouseMove method.
*/
public synchronized void serialEvent(SerialPortEvent oEvent) {
if (oEvent.getEventType() == SerialPortEvent.DATA_AVAILABLE) {
try {
String inputLine=input.readLine();
mouseMove(inputLine);
System.out.println(“********************”);
//System.out.println(inputLine);
} catch (Exception e) {
System.err.println(e.toString());
}
}
// Ignore all the other eventTypes, but you should consider the other ones.
}
public static void main(String[] args) throws Exception {
Mouse main = new Mouse();
main.initialize();
Thread t=new Thread() {
public void run() {
//the following line will keep this app alive for 1000 seconds,
//waiting for events to occur and responding to them (printing incoming messages to console)。
try {Thread.sleep(1000000);} catch (InterruptedException ie) {}
}
};
t.start();
System.out.println(“Started”);
}
// My method mouseMove, takes in a string containing the three data points and operates the mouse in turn
public void mouseMove(String data) throws AWTException
{
int index1 = data.indexOf(“ ”, 0);
int index2 = data.indexOf(“ ”, index1+1);
int yCord = Integer.valueOf(data.substring(0, index1));
int xCord = Integer.valueOf(data.substring(index1 + 1 , index2));
int button = Integer.valueOf(data.substring(index2 + 1));
Robot robot = new Robot();
int mouseY = MouseInfo.getPointerInfo().getLocation().y;
int mouseX = MouseInfo.getPointerInfo().getLocation().x;
if (button == 0)
{
if (buttonOld == 1)
{
robot.mousePress(InputEvent.BUTTON1_DOWN_MASK);
robot.delay(10);
}
}
else
{
if (buttonOld == 0)
robot.mouseRelease(InputEvent.BUTTON1_DOWN_MASK);
}
if (Math.abs(xCord - 500) 》 5)
mouseX = mouseX + (int)((500 - xCord) * 0.02);
if (Math.abs(yCord - 500) 》 5)
mouseY = mouseY - (int)((500 - yCord) * 0.02);
robot.mouseMove(mouseX, mouseY);
buttonOld = button;
System.out.println(xCord + “:” + yCord + “:” + button + “:” + mouseX + “:” + mouseY);
return;
}
}
步驟5:疑難解答
使Java程序正常工作可能是難。如果您遇到困難我會(huì)得到一些提示:
- 將PORT_NAMES []中的“Com4”字符串更改為您的arduino Uno所連接的端口。 (我從Java程序中的默認(rèn)Com3更改為Com4)
- 指出與Raspberry Pi相關(guān)的行(如果你復(fù)制了我的程序,我已經(jīng)這樣做了)
- 單擊“重建軟件包”或等效的IDE
-在IDE中重置Java虛擬機(jī)。甚至可能在第一次使用鼠標(biāo)之前重置程序。
第6步:結(jié)論
我希望這個(gè)項(xiàng)目適用于您,并且您可以改善它。最終,最簡單的解決方案是使用Arduino Leonard或Mini作為鼠標(biāo)輸入的系統(tǒng)設(shè)備,但我發(fā)現(xiàn)使Uno功能以非設(shè)計(jì)的方式 - 鼠標(biāo) - 通過使用我的方式很有趣有限的Java知識。
我獨(dú)自學(xué)習(xí)了很多方法,并希望將來增加一些功能:
-右鍵單擊按鈕。操縱桿有一個(gè)我保留左鍵的按鈕。
- 這個(gè)項(xiàng)目的實(shí)際設(shè)備驅(qū)動(dòng)程序。我不確定這是否可行,也許有人可以就此問題給我啟發(fā)!
責(zé)任編輯:wv
-
鼠標(biāo)
+關(guān)注
關(guān)注
6文章
593瀏覽量
40557 -
Arduino
+關(guān)注
關(guān)注
189文章
6494瀏覽量
190324
發(fā)布評論請先 登錄
基于stm32和mpu9250的usb hid鍵盤、鼠標(biāo)、游戲控制器實(shí)例打包下載
基于stm32和mpu9250的usb hid鍵盤、鼠標(biāo)、游戲控制器
絲桿支撐座對設(shè)備性能有哪些影響?

如何使用Arduino實(shí)現(xiàn)CAN總線通信呢
自己設(shè)計(jì)的Arduino UNO R3主控板原理圖+PCB源文件(可直接打樣)
基于Arduino的串口通信項(xiàng)目
如何使用Arduino實(shí)現(xiàn)CAN總線通信
采用霍爾效應(yīng)傳感器的游戲手柄和控制桿設(shè)計(jì)

開源項(xiàng)目!基于Arduino做的“魷魚游戲”BOSS面具,支持動(dòng)作檢測
多頭絲桿與滾珠絲桿有何不同?

20.0-電磁桿的組裝和實(shí)物介紹“這個(gè)是就是你想要的“-智能車電磁組 電磁循跡小車
NXP 恩智浦 電競鼠標(biāo)方案集錦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論