") 怎樣用樹莓派和3軸加速度計(jì)LIS3DHTR檢查3個(gè)垂直軸X和Y及Z上的加速度
怎樣用樹莓派和3軸加速度計(jì)LIS3DHTR檢查3個(gè)垂直軸X和Y及Z上的加速度

步驟1:我們需要的基本硬件
對(duì)我們來(lái)說(shuō)問(wèn)題不大,因?yàn)槲覀冇泻芏喙ぷ饕觥o(wú)論如何,我們知道其他人在有用的地方積聚正確的部分是多么麻煩,這是毫無(wú)理由的,每一分錢都不必理會(huì)。因此,我們將為您提供幫助。請(qǐng)按照隨附的附件獲得完整的零件清單。
1。 Raspberry Pi
第一步是獲得Raspberry Pi開發(fā)板。 Raspberry Pi是基于Linux的單板PC。這款小巧的PC具備強(qiáng)大的計(jì)算能力,可作為小工具活動(dòng)的一部分,以及諸如電子表格,單詞準(zhǔn)備,網(wǎng)頁(yè)掃描和電子郵件以及游戲等簡(jiǎn)單的操作。
2。 Raspberry Pi的I2C Shield
Raspberry Pi真正缺少的主要問(wèn)題是I2C端口。因此,TOUTPI2I2C連接器使您可以將Rasp Pi與任何I2C設(shè)備一起使用。它可以在DCUBE商店中購(gòu)買。
3。 3軸加速度計(jì)LIS3DHTR
LIS3DH是一種超低功耗高功率性能屬于“ nano ”系列的三軸線性加速度計(jì),具有數(shù)字I2C/SPI串行接口標(biāo)準(zhǔn)輸出。我們從DCUBE商店購(gòu)買了此傳感器
4。連接電纜
我們從 DCUBE商店
5獲得了I2C連接電纜。 Micro USB電纜
Raspberry Pi最小,但最費(fèi)力,但是最嚴(yán)格。處理最簡(jiǎn)單的方法是使用 Micro USB電纜。
6。 Web訪問(wèn)是必需的
互聯(lián)網(wǎng)孩子們永遠(yuǎn)不要睡覺(jué)!
讓您的Raspberry Pi與以太網(wǎng)相關(guān)聯(lián)(LAN)電纜,然后將其連接到網(wǎng)絡(luò)路由器。選修課程,搜索 WiFi連接器,然后使用USB端口之一連接到遠(yuǎn)程系統(tǒng)。這是一個(gè)敏銳的決定,簡(jiǎn)單,小巧,偽劣!
7。 HDMI電纜/遠(yuǎn)程訪問(wèn)
Raspberry Pi具有HDMI端口,您可以使用HDMI電纜專門連接到屏幕或電視。 可選,您可以使用 SSH 從Linux PC或Macintosh從終端與Raspberry Pi關(guān)聯(lián)。同樣, PuTTY ,一個(gè)免費(fèi)的開源終端模擬器聽起來(lái)像是一個(gè)不錯(cuò)的選擇。
步驟2:連接硬件
根據(jù)原理圖出現(xiàn)電路。繪制圖表并精確遵循輪廓。
想象力比知識(shí)更重要。
Raspberry Pi與I2C Shield的連接
最重要的是,拿起Raspberry Pi并在其上找到I2C Shield。在Pi的 GPIO 引腳上輕輕按一下Shield,我們就可以像餅圖一樣簡(jiǎn)單地完成此過(guò)程(請(qǐng)參見快照)。
傳感器和Raspberry Pi
帶傳感器并與I2C電纜接口。為了使此電纜正常工作,請(qǐng)回憶與I2C輸入相關(guān)的I2C輸出 ALWAYS 。對(duì)于覆有I2C屏蔽層的GPIO引腳的Raspberry Pi,必須采取同樣的措施。
我們贊同使用I2C電纜,因?yàn)樗鼰o(wú)需檢查引出線,緊固和帶來(lái)的不適感甚至用最小的螺絲擰緊。使用此基本的附件和播放電纜,您可以有效地呈現(xiàn),替換小工具或向應(yīng)用程序添加更多小工具。
注意:棕色電線應(yīng)可靠地跟隨一個(gè)設(shè)備的輸出與另一設(shè)備的輸入之間的接地(GND)連接。/strong》
Web網(wǎng)絡(luò)是關(guān)鍵
要取得成功,我們需要為Raspberry建立互聯(lián)網(wǎng)協(xié)會(huì)皮。為此,您可以選擇將以太網(wǎng)(LAN)電纜與家庭網(wǎng)絡(luò)連接。此外,作為一種替代方案,可以選擇的做法是使用 WiFi USB連接器。通常,您需要驅(qū)動(dòng)程序才能使其正常運(yùn)行。因此,請(qǐng)?jiān)谡f(shuō)明中傾向于使用 Linux 的服務(wù)器。
插入將Micro USB電纜插入Raspberry Pi的電源插孔。沖一下就可以了。
與屏幕的連接
我們可以使用 HDMI電纜 》與另一個(gè)屏幕相關(guān)聯(lián)。在某些情況下,您必須使用Raspberry Pi而不將其連接到屏幕,否則您可能需要從其他地方查看它的某些數(shù)據(jù)。可以想象,有這樣做的創(chuàng)新方法和精明的方法。其中之一是利用- SSH(遠(yuǎn)程命令行登錄)。您也可以同樣使用 PUTTY 軟件。這些是針對(duì)高級(jí)用戶的。因此,這里不包括詳細(xì)信息。
步驟3:Raspberry Pi的Python編碼
的Python代碼可以在我們的 Github 存儲(chǔ)庫(kù)中訪問(wèn)》 Raspberry Pi 和 LIS3DHTR 傳感器。
在繼續(xù)執(zhí)行代碼之前,請(qǐng)確保您已閱讀自述文件存檔中給出的規(guī)則,并根據(jù)其設(shè)置您的Raspberry Pi。只是暫時(shí)休息一下,可以考慮所有事情。
加速度計(jì)是一種可以測(cè)量加速度的機(jī)電小工具。這些力量可能是靜態(tài)的,類似于在腳上不斷施加重力的力量,或者它們可能是可變的-通過(guò)移動(dòng)或振動(dòng)加速度計(jì)來(lái)實(shí)現(xiàn)。
隨附的是python代碼,您可以克隆并以您傾向于的任何方式調(diào)整代碼。
# Distributed with a free-will license.
# Use it any way you want, profit or free, provided it fits in the licenses of its associated works.
# LIS3DHTR
# This code is designed to work with the LIS3DHTR_I2CS I2C Mini Module available from dcubestore.com
# http://dcubestore.com/product/lis3dhtr-3-axis-accelerometer-digital-output-motion-sensor-i%C2%B2c-mini-module/
import smbus
import time
# Get I2C bus
bus = smbus.SMBus(1)
# LIS3DHTR address, 0x18(24)
# Select control register1, 0x20(32)
# 0x27(39) Power ON mode, Data rate selection = 10 Hz
# X, Y, Z-Axis enabled
bus.write_byte_data(0x18, 0x20, 0x27)
# LIS3DHTR address, 0x18(24)
# Select control register4, 0x23(35)
# 0x00(00) Continuous update, Full-scale selection = +/-2G
bus.write_byte_data(0x18, 0x23, 0x00)
time.sleep(0.5)
# LIS3DHTR address, 0x18(24)
# Read data back from 0x28(40), 2 bytes
# X-Axis LSB, X-Axis MSB
data0 = bus.read_byte_data(0x18, 0x28)
data1 = bus.read_byte_data(0x18, 0x29)
# Convert the data
xAccl = data1 * 256 + data0
if xAccl 》 32767 :
xAccl -= 65536
# LIS3DHTR address, 0x18(24)
# Read data back from 0x2A(42), 2 bytes
# Y-Axis LSB, Y-Axis MSB
data0 = bus.read_byte_data(0x18, 0x2A)
data1 = bus.read_byte_data(0x18, 0x2B)
# Convert the data
yAccl = data1 * 256 + data0
if yAccl 》 32767 :
yAccl -= 65536
# LIS3DHTR address, 0x18(24)
# Read data back from 0x2C(44), 2 bytes
# Z-Axis LSB, Z-Axis MSB
data0 = bus.read_byte_data(0x18, 0x2C)
data1 = bus.read_byte_data(0x18, 0x2D)
# Convert the data
zAccl = data1 * 256 + data0
if zAccl 》 32767 :
zAccl -= 65536
# Output data to screen
print “Acceleration in X-Axis : %d” %xAccl
print “Acceleration in Y-Axis : %d” %yAccl
print “Acceleration in Z-Axis : %d” %zAccl
步驟4:代碼的可操作性
從 Github 下載(或git pull)代碼,然后在Raspberry Pi中將其打開。
運(yùn)行命令以編譯并上傳代碼在終端中,并在屏幕即可。幾分鐘后,它將演示每個(gè)參數(shù)。為了保證一切正常,您可以將這項(xiàng)工作付諸實(shí)踐。
第5步:應(yīng)用程序和功能
由 STMicroelectronics ,LIS3DHTR具有動(dòng)態(tài)用戶可選的±2g/±4g/±8g/±16g滿刻度,并且能夠以1Hz至5kHz的輸出數(shù)據(jù)速率測(cè)量加速度。 LIS3DHTR適用于運(yùn)動(dòng)激活功能和自由落體檢測(cè)。它可量化傾斜檢測(cè)應(yīng)用中重力的靜態(tài)加速度和附加動(dòng)態(tài)加速度即將發(fā)布,原因是運(yùn)動(dòng)或震動(dòng)。其他應(yīng)用包括點(diǎn)擊/雙擊識(shí)別,手持設(shè)備的智能節(jié)電,計(jì)步器,顯示方向,游戲和虛擬現(xiàn)實(shí)輸入設(shè)備,撞擊識(shí)別以及記錄和振動(dòng)監(jiān)控與補(bǔ)償。 p》
步驟6:結(jié)論
相信這項(xiàng)工作會(huì)刺激進(jìn)一步的實(shí)驗(yàn)。 該I2C傳感器具有出色的適應(yīng)性,適度且可用。由于這是一個(gè)非常棒的非永久性框架,因此您可以通過(guò)有趣的方式擴(kuò)展此分配并甚至對(duì)其進(jìn)行增強(qiáng)。
例如,您可以從《使用 LIS3DHTR和Raspberry Pi 來(lái)實(shí)現(xiàn)strong》計(jì)步器。在上述任務(wù)中,我們利用了基礎(chǔ)計(jì)算。 加速度可以是分析步行決策的相關(guān)參數(shù)。 您可以查看個(gè)人的三個(gè)運(yùn)動(dòng)分量,分別是向前(滾動(dòng),X),側(cè)面(俯仰,Y)和垂直(偏航軸,Z)。記錄所有三個(gè)軸。 至少1個(gè)軸具有相對(duì)較大的周期性加速度值。因此,峰方向和算法必不可少。考慮到該算法的階躍參數(shù)(數(shù)字濾波器,峰值檢測(cè),時(shí)間窗口等),您可以識(shí)別并計(jì)數(shù)階躍,以及測(cè)量距離,速度以及(在一定程度上)消耗的卡路里。因此,您可以通過(guò)各種方式使用此傳感器。我們相信大家都喜歡!我們將嘗試盡早而不是稍后地再現(xiàn)此計(jì)步器的工作原理,配置,代碼,計(jì)算將步行和跑步分開的方式以及消耗卡路里的部分。
責(zé)任編輯:wv
-
加速度計(jì)
+關(guān)注
關(guān)注
6文章
727瀏覽量
46840 -
樹莓派
+關(guān)注
關(guān)注
121文章
2003瀏覽量
107438
發(fā)布評(píng)論請(qǐng)先 登錄
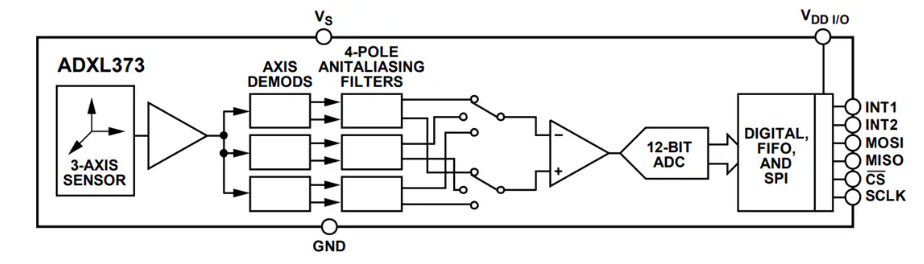
Analog Devices Inc. ADXL373微功耗3軸MEMS加速度計(jì)數(shù)據(jù)手冊(cè)
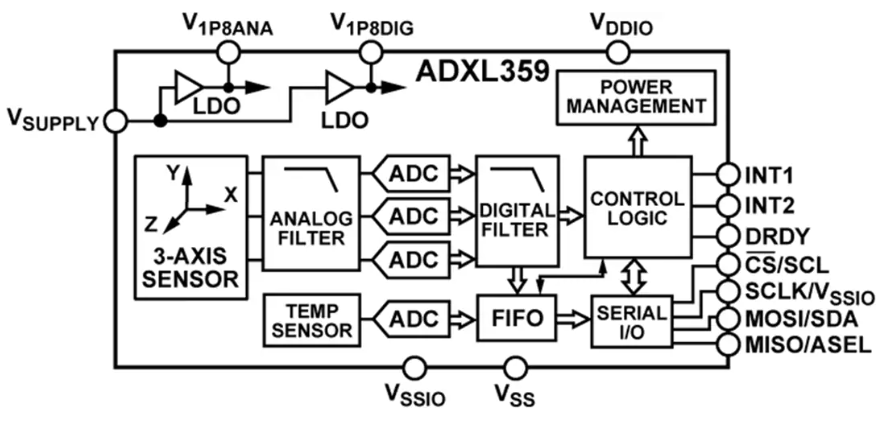
Analog Devices Inc. ADXL359低功耗3軸MEMS加速度計(jì)數(shù)據(jù)手冊(cè)
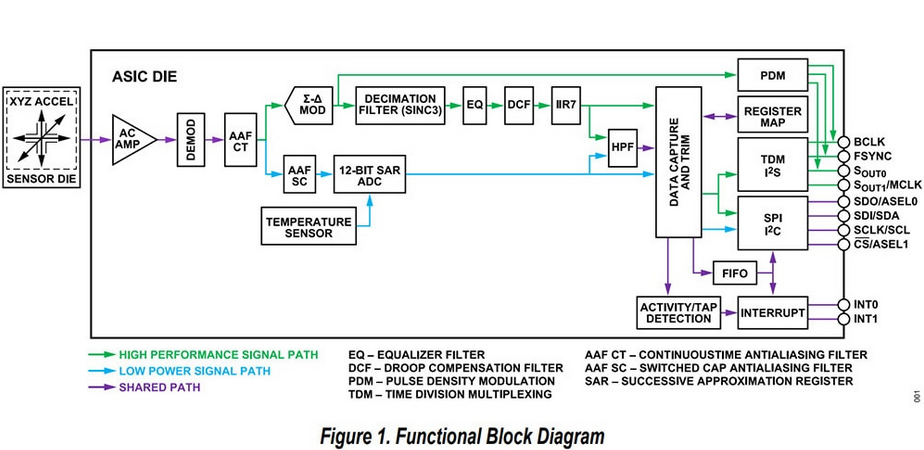
Analog Devices Inc. ADXL382 3軸MEMS加速度計(jì)數(shù)據(jù)手冊(cè)
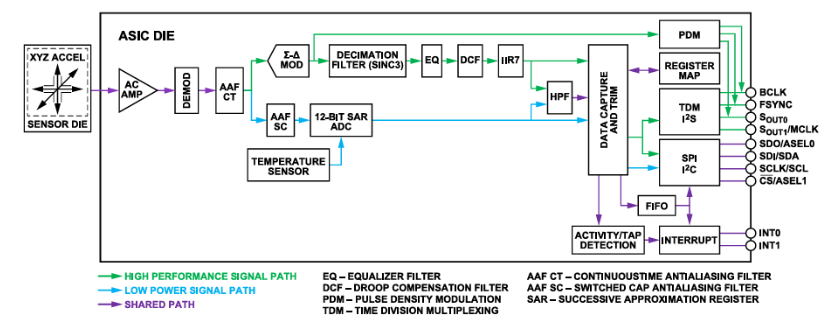
ADXL382 低噪聲密度、低功耗、3 軸加速度計(jì)數(shù)據(jù)手冊(cè)和產(chǎn)品介紹
ADXL345超低功耗3軸加速度計(jì)中文手冊(cè)
十軸姿態(tài)傳感器模塊 | 集成加速度計(jì)、陀螺儀、磁力計(jì),自帶BLE5.0藍(lán)牙

MEMS加速度計(jì)的工作原理是什么
PCB Piezotronics推出357A67型三軸電荷輸出加速度計(jì)
具有TLV2772的3V加速度計(jì)

EPSON工業(yè)級(jí)加速度計(jì)選型

XC1011SD (X2E0000210002) 愛普生汽車用角速度_加速度組合傳感器選型資料
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(4)----測(cè)量?jī)A斜度

e2studio開發(fā)三軸加速度計(jì)LIS2DW12(3)----檢測(cè)活動(dòng)和靜止?fàn)顟B(tài)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(2)----基于中斷信號(hào)獲取加速度數(shù)據(jù)
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(1)----輪詢獲取加速度數(shù)據(jù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論