") 如何使用Arduino微控制器發(fā)出運(yùn)動(dòng)感應(yīng)警報(bào)
如何使用Arduino微控制器發(fā)出運(yùn)動(dòng)感應(yīng)警報(bào)
步驟1:您需要哪些組件
為此Arduino項(xiàng)目,您需要:
1個(gè)Arduino Uno
1個(gè)LED
1x壓電蜂鳴器
1x面包板
1x跳線
您還需要一臺(tái)安裝了Arduino IDE的計(jì)算機(jī)(最低操作系統(tǒng)XP)。
步驟2:接線PIR傳感器
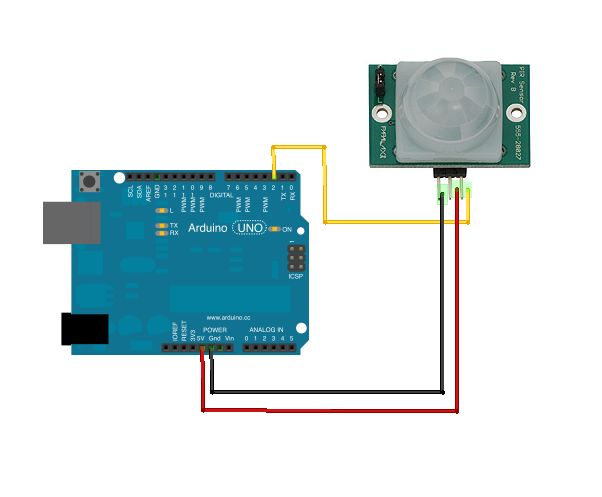
PIR傳感器具有三個(gè)引腳:
-左側(cè)的一個(gè)是GND(需要連接到GND引腳)
-中間的一個(gè)是OUT(需要連接到數(shù)字引腳)
-右邊的是VCC(需要連接到5v)
將它連接到Arduino的數(shù)字引腳2,如圖所示。
第3步:連接壓電蜂鳴器
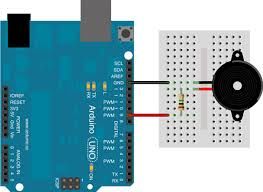
壓電蜂鳴器有2個(gè)引腳:
-一個(gè)是GND(需要連接到Arduino的接地引腳)
-一針ds要連接到數(shù)字引腳,所以我們可以確定其音調(diào)
第4步:連接LED
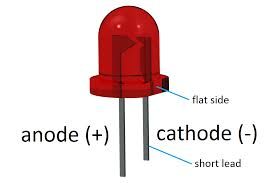
LED有兩個(gè)銷釘,陽(yáng)極和陰極。陽(yáng)極更長(zhǎng),并且始終連接到正電壓。陰極較短,并且始終連接至負(fù)電壓。
將陽(yáng)極連接至引腳13,并將陰極連接至其旁邊的GND引腳。
第5步:將草圖上傳到Arduino板
int inputPin = 2;
int pirState = LOW;
int val = 0;
int pinSpeaker = 10;
void setup(){
pinMode(ledPin,OUTPUT);
pinMode(inputPin,INPUT);
pinMode(pinSpeaker,OUTPUT);
Serial.begin(9600);
}
無(wú)效循環(huán)(){
val = digitalRead(inputPin);
if(val == HIGH){
digitalWrite(ledPin,HIGH);
playTone(300,160);
delay(150);
if(pirState == LOW){ pirState = HIGH;
}
}其他{
digitalWrite(ledPin,LOW);
playTone(0,0);
delay(300);
if(pirState == HIGH);
Serial.println(“運(yùn)動(dòng)結(jié)束!”);
pirState = LOW;
}
}
}
void playTone( long duration,int freq){持續(xù)時(shí)間* = 1000;
int period =(1.0/freq)* 1000000;
long經(jīng)過(guò)時(shí)間= 0;
而(lapsed_time 《持續(xù)時(shí)間){
digitalWrite(pinSpeaker,HIGH);
delayMicroseconds(期間/2);
digitalWrite(pinSpeaker,LOW);
delayMicroseconds(期間/2);
經(jīng)過(guò)時(shí)間+ =(期間);
},點(diǎn)擊}
-
微控制器
+關(guān)注
關(guān)注
48文章
7926瀏覽量
153916 -
警報(bào)器
+關(guān)注
關(guān)注
2文章
72瀏覽量
19929 -
Arduino
+關(guān)注
關(guān)注
189文章
6494瀏覽量
190369
發(fā)布評(píng)論請(qǐng)先 登錄
激光振鏡運(yùn)動(dòng)控制器在玻璃激光鉆孔上的應(yīng)用#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #激光振鏡 #EtherCAT #正運(yùn)動(dòng)
激光振鏡運(yùn)動(dòng)控制器在大幅面激光薄膜切割的應(yīng)用 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制 #E

LabVIEW運(yùn)動(dòng)控制(五):EtherCAT運(yùn)動(dòng)控制器的心跳檢測(cè)功能 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng)

LabVIEW運(yùn)動(dòng)控制(三):EtherCAT運(yùn)動(dòng)控制器的高效加工指令自定義封裝 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器
運(yùn)動(dòng)緩沖在精密激光加工中的應(yīng)用 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制 #激光加工 #正運(yùn)動(dòng)

LabVIEW運(yùn)動(dòng)控制(二):EtherCAT運(yùn)動(dòng)控制器的多軸示教加工應(yīng)用(中) #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器

LabVIEW運(yùn)動(dòng)控制(二):EtherCAT運(yùn)動(dòng)控制器的多軸示教加工應(yīng)用(上)#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器

LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在智能磁驅(qū)輸送線的應(yīng)用#正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #正運(yùn)動(dòng)控制器

EtherCAT運(yùn)動(dòng)控制器配套用手持示教盒快速入門 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #示教盒 #正運(yùn)動(dòng)

微控制器的結(jié)構(gòu)和應(yīng)用

EtherCAT運(yùn)動(dòng)控制器上位機(jī)開(kāi)發(fā)之Python+Qt(二):回零# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制器# 運(yùn)動(dòng)控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論