 帶有Arduino和Jetpack的藍牙游戲控制器的制作
帶有Arduino和Jetpack的藍牙游戲控制器的制作
步驟1:如圖所示進行連接

將操縱桿連接到Jetpack并將其安裝在Arduino上,如圖所示。連接電源。
引腳說明
GND
+ 5V
[VRy] Y軸(模擬)
[SW]按鈕(連接到GND)
步驟2 :上傳代碼
您可以輕松地使用Jetpack無線上傳程序。有關無線編程,請參閱此說明(數據監視)。上傳代碼時,您將使用傳出的COM端口。
或者,您可以將程序直接上傳到Arduino。代碼如下。在繼續下一步之前,請確保所有連接均已完成并且傳感器正在發送數據
步驟3:安裝Python,運行Python腳本
安裝python版本2.7(推薦)或更高版本,請不要忘記在安裝時檢查添加到路徑
通過輸入“ cmd.exe中的python -m pip install pyserial”(對于Windows)
操縱桿的默認鍵是鍵盤箭頭鍵
如果您需要更改輸入鍵,請參閱我的文件(取決于您要玩的游戲)
運行launch-joystick-mode.bat文件
找到上圖所示的傳出Com Port,然后輸入提示
責任編輯:wv
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Arduino
+關注
關注
189文章
6493瀏覽量
190262 -
游戲控制器
+關注
關注
0文章
15瀏覽量
3156
發布評論請先 登錄
相關推薦
熱點推薦
基于stm32和mpu9250的usb hid鍵盤、鼠標、游戲控制器實例打包下載
基于stm32和mpu9250的usb hid鍵盤、鼠標、游戲控制器實例打包,推薦下載!
發表于 05-29 21:44
基于stm32和mpu9250的usb hid鍵盤、鼠標、游戲控制器
基于stm32和mpu9250的usb hid鍵盤、鼠標、游戲控制器 項目實例下載!
純分享帖,需要者可點擊附件免費獲取完整資料~~~【免責聲明】本文系網絡轉載,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請第一時間告知,刪除內容!
發表于 05-23 20:53

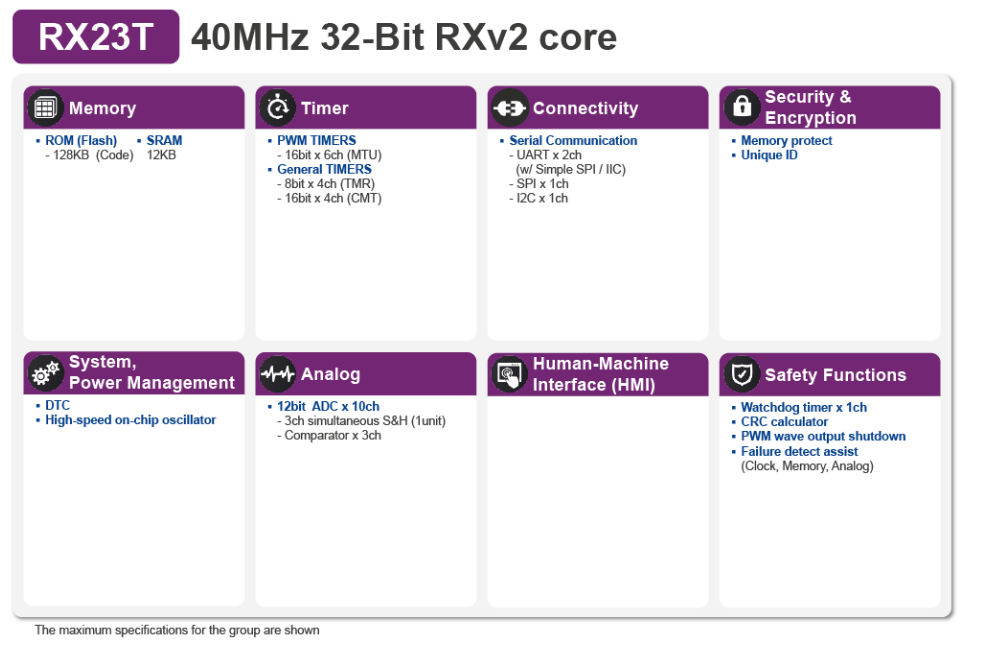
帶有FPU的32位微控制器RX23T系列數據手冊
。 *附件:帶有FPU的32位微控制器RX23T系列數據手冊.pdf 該系列采用 32 位 RX CPU 內核,最高運行
如何使用Arduino實現CAN總線通信呢
CAN(Controller Area Network)總線是一種常用于汽車和工業控制系統的串行通信協議,以其高可靠性和實時性而聞名。Arduino,作為一種流行的開源微控制器平臺,可以通過附加
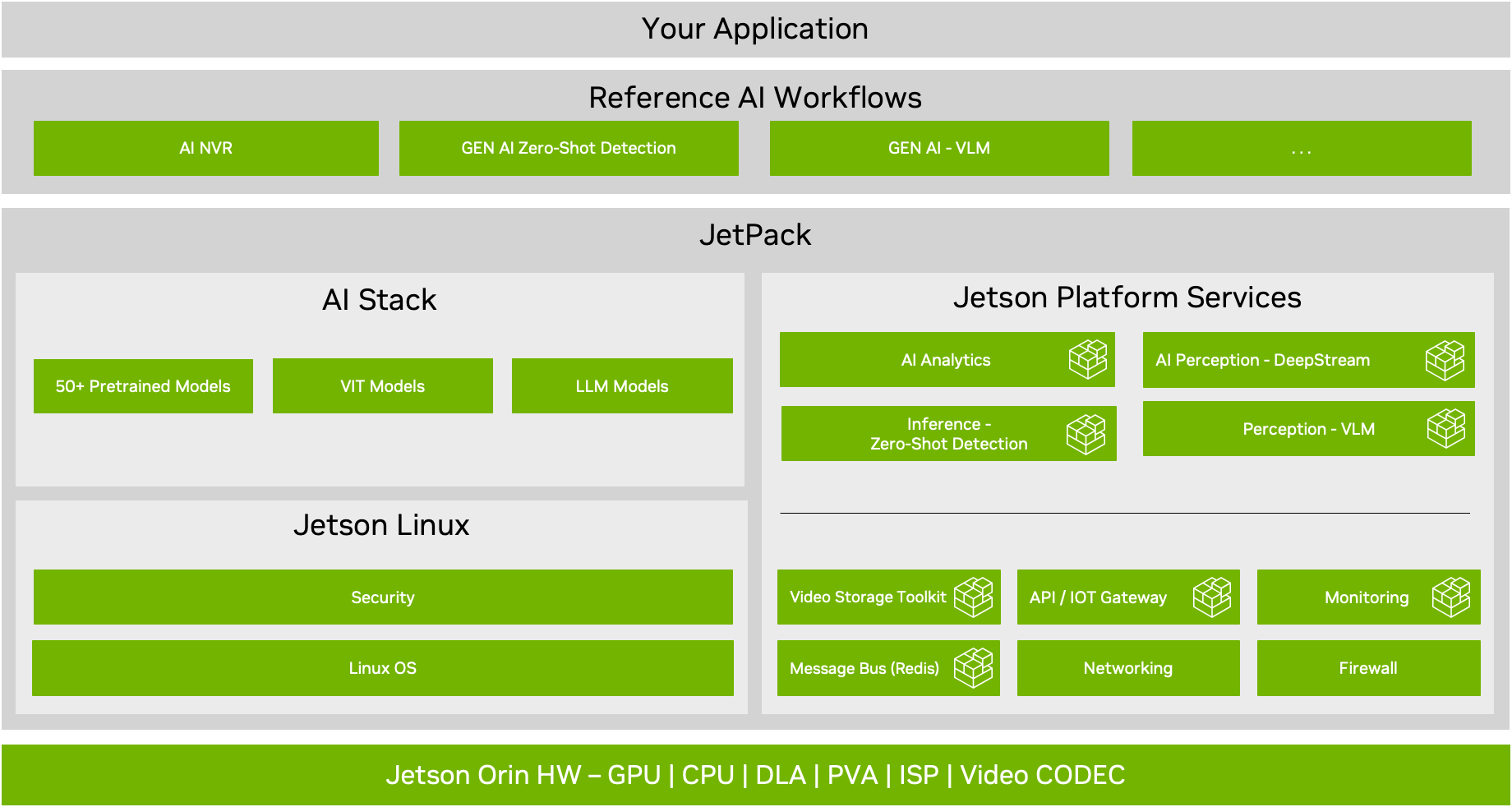
解析NVIDIA JetPack 6.1的新功能
NVIDIA JetPack一直在不斷發展,通過提供量身定制的先進軟件滿足邊緣 AI 和機器人開發者日益增長的需求。每次發布的 JetPack 新版本都會升級性能、加入新功能與優化現有工具,以便為

stm32與Arduino的比較
在微控制器的世界里,STM32和Arduino是兩個經常被提及的名字。STM32是一系列由STMicroelectronics生產的高性能微控制器,而Arduino則是一個開源電子原型
STM32WB0系列無線微控制器滿足低功耗藍牙應用需求
藍牙技術作為應用最為廣泛的2.4GHz短距離通信技術,對無線微控制器芯片的集成度、功耗、性能、安全性等有較高要求。STM32WB0系列,是兼具高性價比和低功耗的無線微控制器,可充分滿足無線藍牙

藍牙模塊如何提升游戲設備的體驗?
在當今科技飛速發展的時代,游戲設備正經歷著一場前所未有的智能化變革。作為連接虛擬世界與現實體驗的重要橋梁,藍牙模塊已經成為游戲設備不可或缺的核心組件之一。它的廣泛應用,不僅為玩家提供了更加便捷、流暢
NVIDIA JetPack 6.0版本的關鍵功能
NVIDIA JetPack SDK 支持 NVIDIA Jetson 模塊,為構建端到端加速 AI 應用提供全面的解決方案。JetPack 6 通過微服務和一系列新功能,擴展了 Jetson 平臺的靈活性和可擴展性,是 2024 年截至目前下載量最高的


藍牙模塊在無線游戲設備中的應用
隨著科技的飛速發展,無線游戲設備已經成為游戲產業的重要組成部分,為用戶提供了更加便捷、自由的游戲體驗。藍牙模塊作為無線游戲設備中的核心技術之
控制器的主要作用是指什么
(Controller)是一種用于實現對被控對象的控制作用的設備或裝置。它根據被控對象的輸入信號和預定的控制規律,通過計算和處理,產生相應的輸出信號,以實現對被控對象的控制。控制器的主





 工商網監
工商網監
評論