 如何將Arduino和步進電機驅動器連接
如何將Arduino和步進電機驅動器連接
第1步:簡介
說明:
雙極步進電機是離散運動的直流電機。它具有多個線圈,這些線圈以“相”的形式組織。通過依次給每個相通電,電動機將旋轉,每次一步。為了能夠移動電動機,您將需要一個電動機驅動器。因此,步進電機驅動器A4988被設計為扮演這個角色。 A4988步進電機驅動器帶有散熱器。此步進電機驅動器使您可以控制一個雙極步進電機,每個線圈的最大輸出電流為2 A。
雙極步進電機的規格:
產地:中國
型號:42HD04
低成本,小尺寸
雙極
4引線
1.8度/步
扭矩:2.8kg.cm
尺寸:33mm x 42mm x 42mm
施加電壓并測試:6V至12V
步進電機驅動器A4988的規格:
簡單的步進和方向控制界面
五種不同的步進分辨率:全步,半步,四分之一步,八步,十六步
可調電流控制使您可以通過電位計設置最大電流輸出,該電位計允許您使用高于步進電機額定電壓的電壓電壓以實現更高的階躍率。
智能斬波控制,可自動選擇正確的電流衰減模式(快速衰減或緩慢衰減)
過熱過熱關閉自己的,欠壓鎖定和交叉電流保護
對地短路保護和短路負載保護
尺寸:20mm x 15mm x 10mm
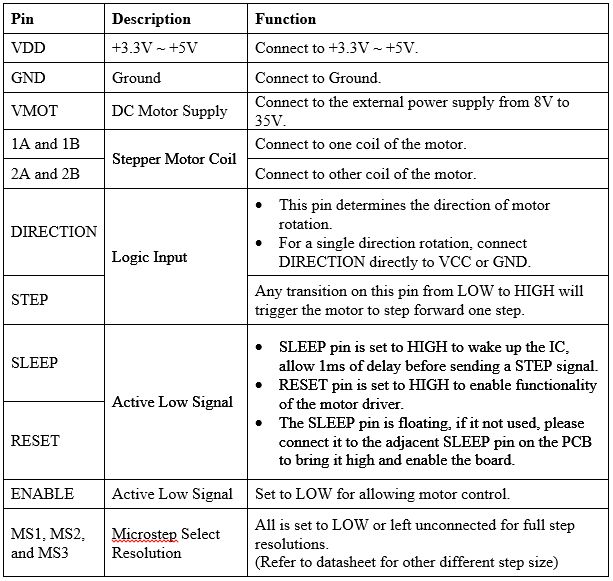
步驟2:引腳定義

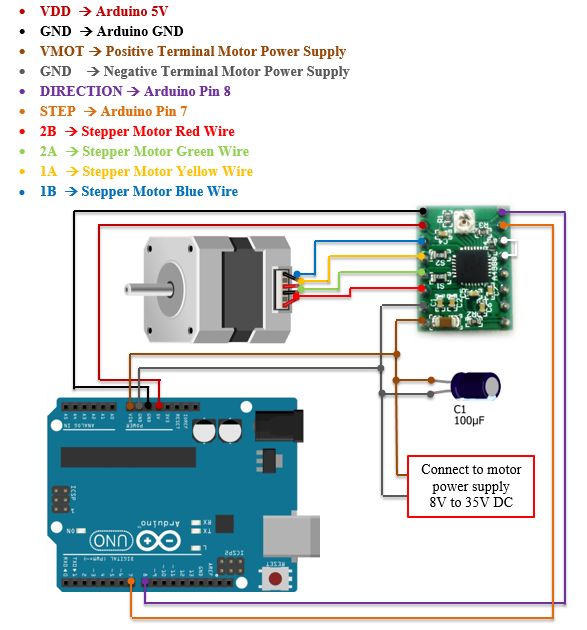
步驟3:示例硬件安裝
第4步:示例源代碼
要獲取結果,請下載下面隨附的示例源代碼并將其上傳到Arduino。
第5步:過程(1)
此示例通過使用Arduino UNO通過A4988步進電機驅動器模塊驅動42步步進電機設備來完成。在將電機電源連接到模塊之前,必須先通過USB 2.0 A型公頭到B型公頭電纜將示例源代碼上傳到Arduino UNO板上。
步驟6:步驟(2)
接下來,使用板上的電位計調整驅動器的電流限制。這是為了確保電流在電動機的電流限制內(從0mA到2000mA(2A))。
為防止損壞電動機和驅動器模塊,電流必須有效限于1A以下。在全步模式下,流經線圈的電流限制為電流限制的70%,因此,要獲得1 A的全步線圈電流,電流限制應為1 A/0.7 = 1.4 A,這對應于Vref為1.4 A/2.5 = 0.56V。有關更多信息,請參考A4988數據表。與參考電壓相關的電流極限如下:
電流極限= Vref/(8 x Rs)
Rs =感測電阻
Vref = REF引腳上的輸入電壓。
由于不同的步進電機具有各自的規格,因此請檢查電機數據表中的當前設置。在此示例中,Vref(參考電壓)設置為約0.4 V,因此電流限制為1A。您可以通過將萬用表探針連接在電位計中心和接地引腳之間來測量模塊的Vref。
步驟7:步驟(3)
用于上傳源代碼的USB電纜現在可以斷開代碼了。接下來,通過電源插孔將電動機電源(鋰電池,7.4 V,1200mAh)連接到模塊。步進電機將根據給定的示例源代碼開始順時針和逆時針旋轉。
責任編輯:wv
-
驅動器
+關注
關注
54文章
8646瀏覽量
149356 -
步進電機
+關注
關注
152文章
3162瀏覽量
149316 -
Arduino
+關注
關注
189文章
6494瀏覽量
190334
發布評論請先 登錄
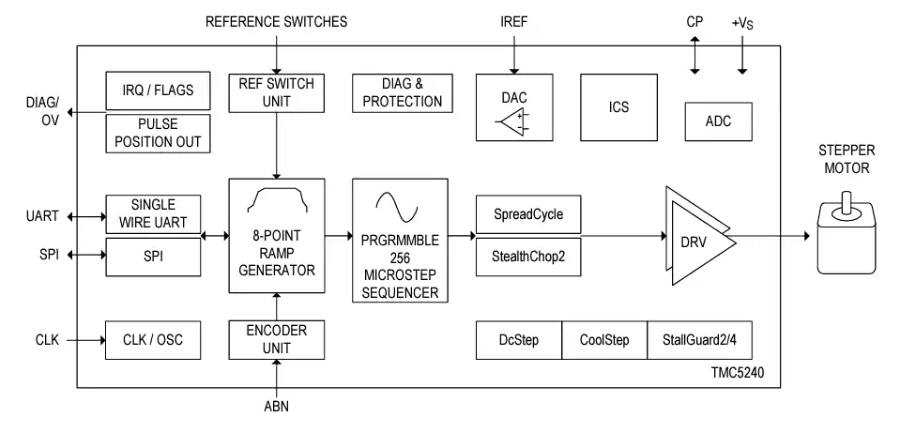
ADI Trinamic TMC5240x步進電機控制器和驅動器IC


基于STM32F405RGT6的TMC2660步進電機驅動器,附帶原理圖+PCB
EVL6480 步進電機驅動器評估板








 工商網監
工商網監
評論