 如何使用操縱桿通過FPGA控制步進電機
如何使用操縱桿通過FPGA控制步進電機
第1步:收集您的材料
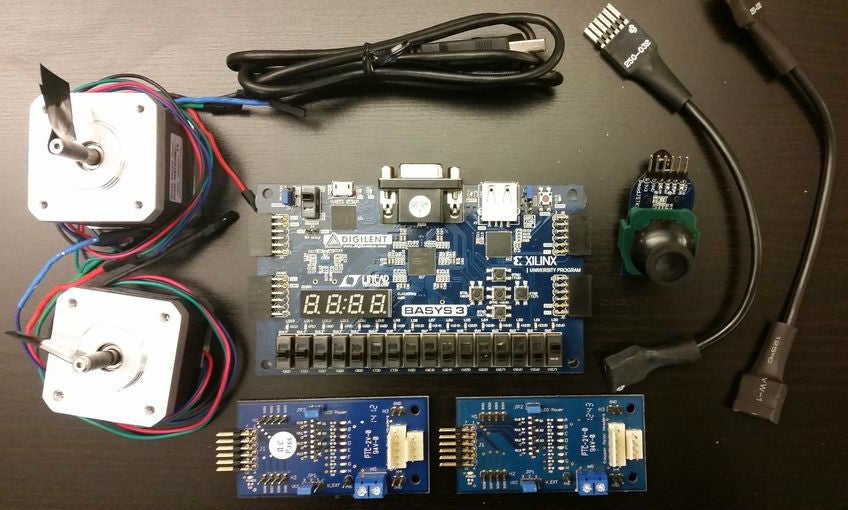
您需要什么:
-已閱讀并或完成了我的PmodJSTK和PmodSTEP教程
-Xilinx Vivado已安裝并獲得許可
-Basys 3
-2 PmodSTEP
-PmodJSTK
-2步進電機
-USB A至B micro
-2 12針Pmod電纜
步驟2:代碼的結構
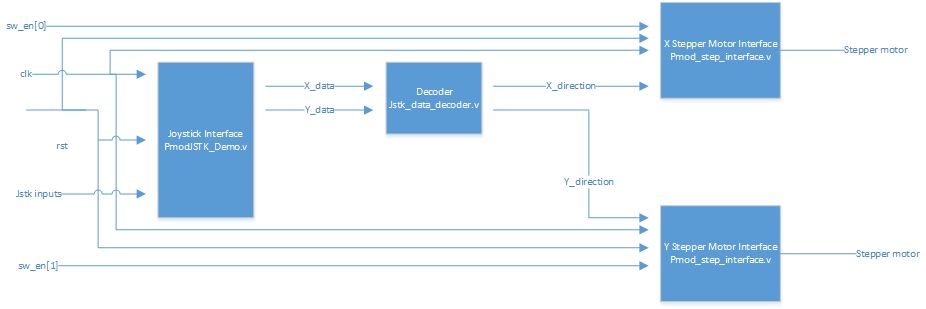
為連接這兩段代碼,我添加了一個解碼器,并使用了一個PmodJSTK接口和兩個PmodSTEP驅動程序。您可以在上圖中看到此結構。我修改了PmodJSTK接口,以使其僅從操縱桿接收數據,而不向LED發送數據。
解碼器從操縱桿獲取數據,并將其轉換為方向信號,該信號指示步進電機應向左,向右還是靜止。當操縱桿居中時,步進電機不應移動。
步驟3:下載并打開Vivado項目

下載此步驟附帶的zip文件。
解壓縮文件并打開vivado項目。您可以通過雙擊文件或打開vivado并選擇打開的項目來執行此操作。注意:我使用Vivado 2015.4創建了這個項目。如果安裝了其他版本,建議您在您的版本中創建一個新項目,然后添加每個源文件。您將需要添加jstksteptop.v,PmodJSTK_Demo.v,PmodJSTK.v,ssdCtrl.v,ClkDiv_5Hz.v,jstk_data_decoder.v,pmod_step_interface.v,clock_div.v,pmod_step_driver.v和jstk_servo_constraints。
第4步:生成位文件并對板進行編程
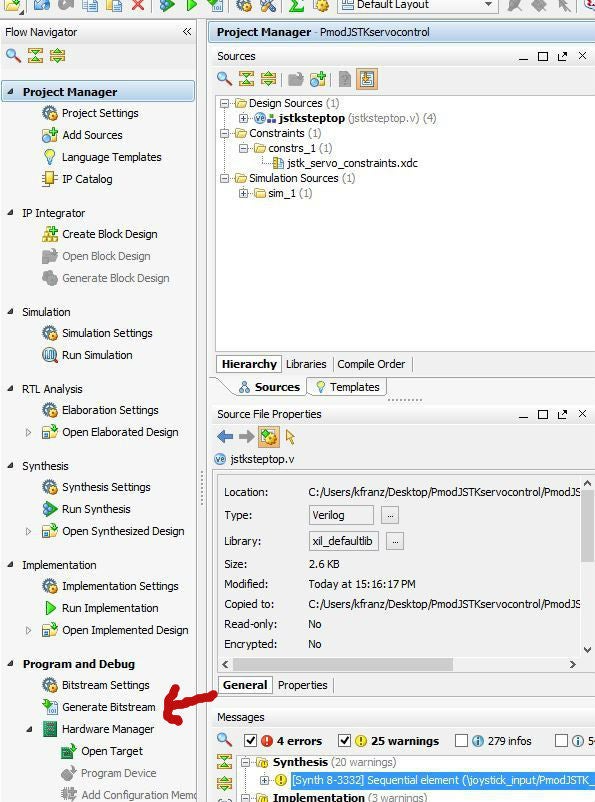
打開文件后,您可以生成位文件并
要生成位文件,請雙擊“生成位流”。要對該板進行編程,請打開硬件管理器,打開目標板并對板進行編程。
第5步:將所有組件插入在一起
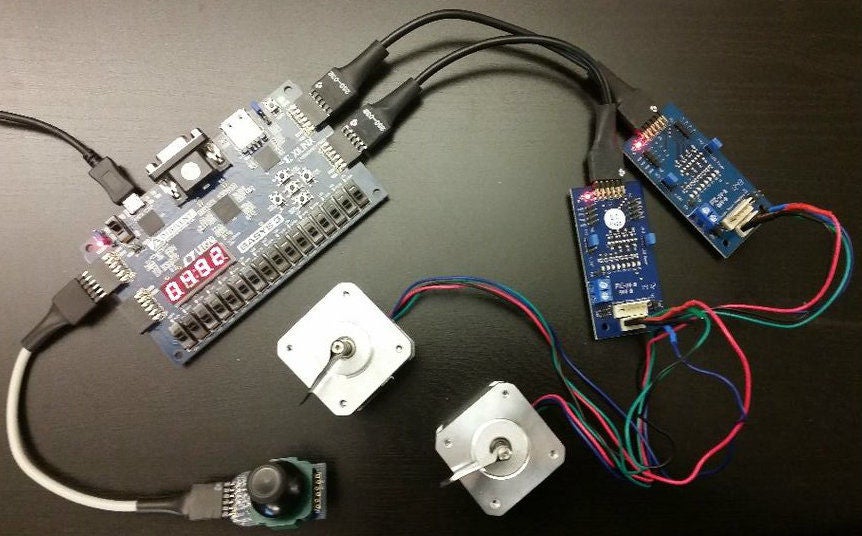
將PmodJSTK插入Pmod端口JA的頂層,將PmodSTEPS插入Pmod端口JB和JC,然后將伺服器插入PmodSTEP。
要啟用伺服翻轉開關,請打開1和0。現在,您可以移動操縱桿來控制步進電機的運動。
-
FPGA
+關注
關注
1644文章
21993瀏覽量
615341 -
步進電機
+關注
關注
152文章
3162瀏覽量
149300 -
操縱桿
+關注
關注
0文章
69瀏覽量
8711
發布評論請先 登錄
步進電機的控制實現方法

帶你了解絲桿電機的詳細知識
通過具體案例,選擇合適的步進電機


步進電機如何自適應控制?步進電機如何細分驅動控制?
步進電機轉速怎么控制高低
步進電機的控制技術及發展概況有哪些?
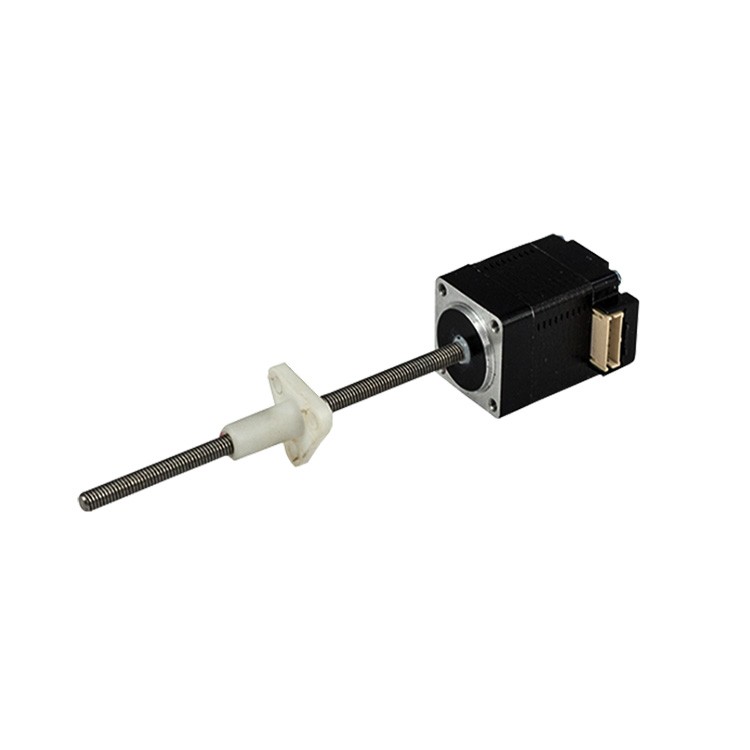
微型絲桿步進電機:精準驅動方式解析






 工商網監
工商網監
評論