 路徑跟隨機器人越野車的制作
路徑跟隨機器人越野車的制作

步驟1:組裝材料

圖片中顯示的某些材料用于制作刮的。但是,本教程將不介紹有關如何為越野車制造底盤或模型或如何將電線焊接至電動機的過程。如果您愿意,這里是您需要的所有材料:
Raspberry Pi 3
電機控制板
面包板
一個T型補鞋匠+
2個12V直流電動機
2個輪子
1個AA電池座(用于4個AA電池)
4節AA電池
跳線
USB電池組
螺絲起子
焊接鐵和焊料
剝線鉗
小紙板或塑料盒和膠水/膠帶
2條線傳感器
8條母對母跳線
4條公對公跳線
絕緣帶
步驟2:組裝電動機板
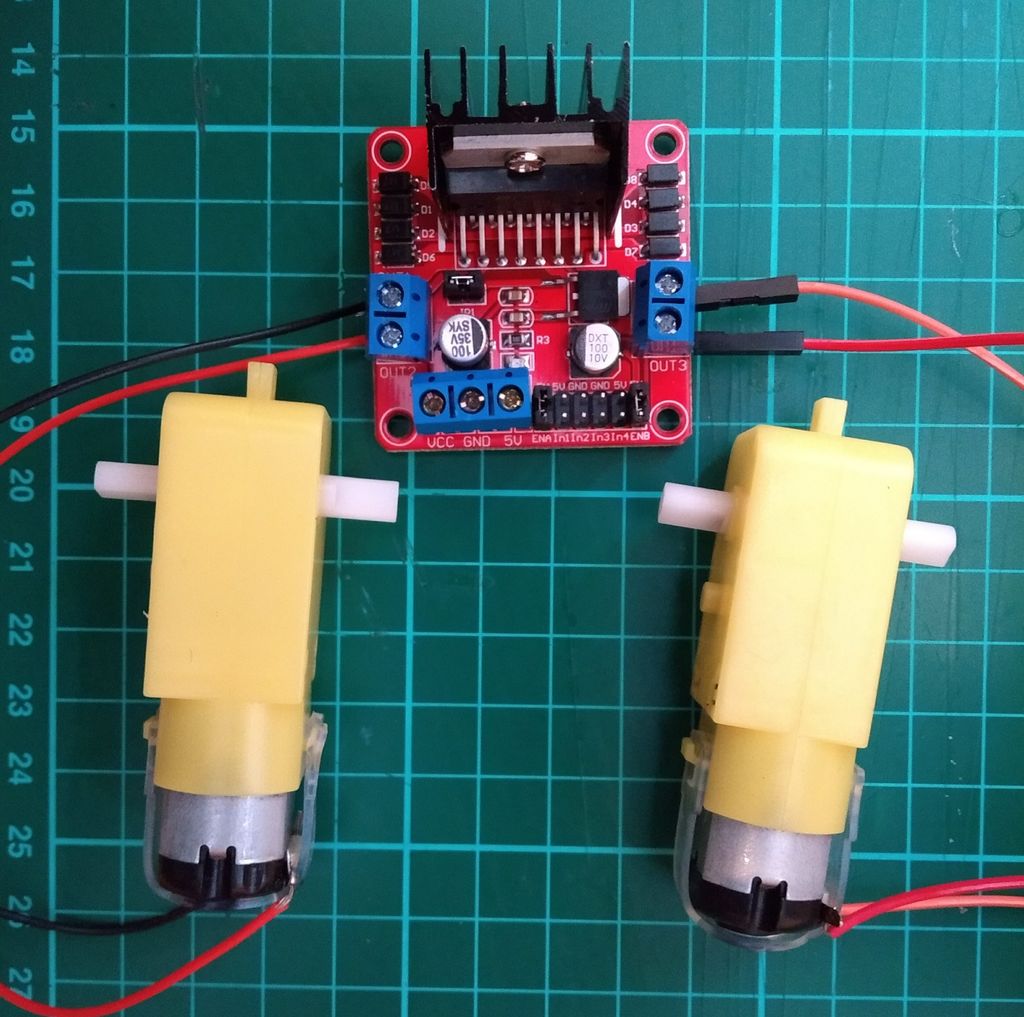
假設已設置電動機,則需要將電動機連接到H橋板上。為此,您將需要一把小螺絲刀。現在,您需要將電動機連接到板上。為此,您將需要一個小的螺絲刀
使用螺絲刀,松開端子排中的螺釘。將剝皮的電線末端插入接線盒。
步驟3:為電動機供電
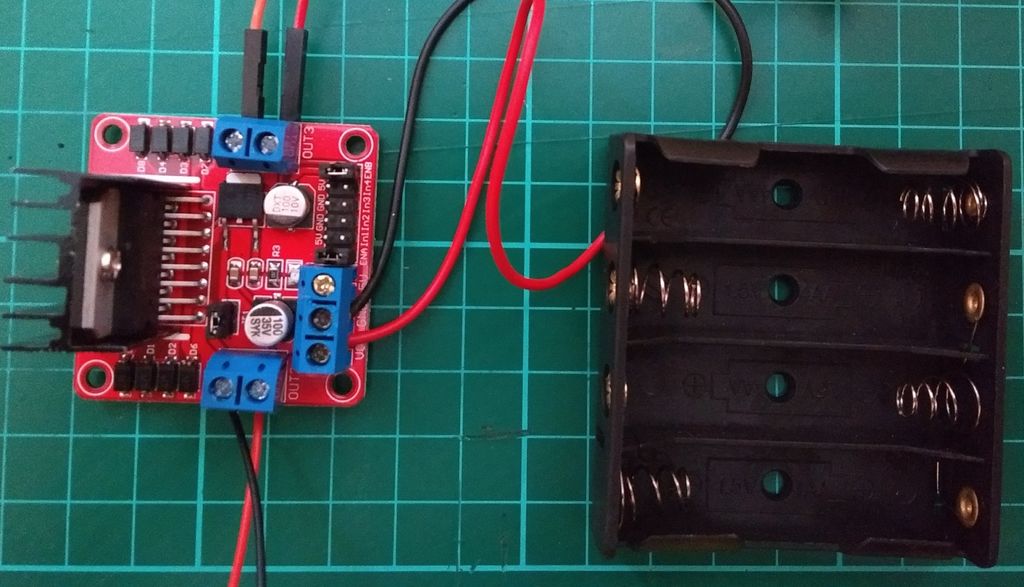
電動機需要的功率超過Rpi可以提供的功率。因此,您必須使用4節AA電池為它們供電。
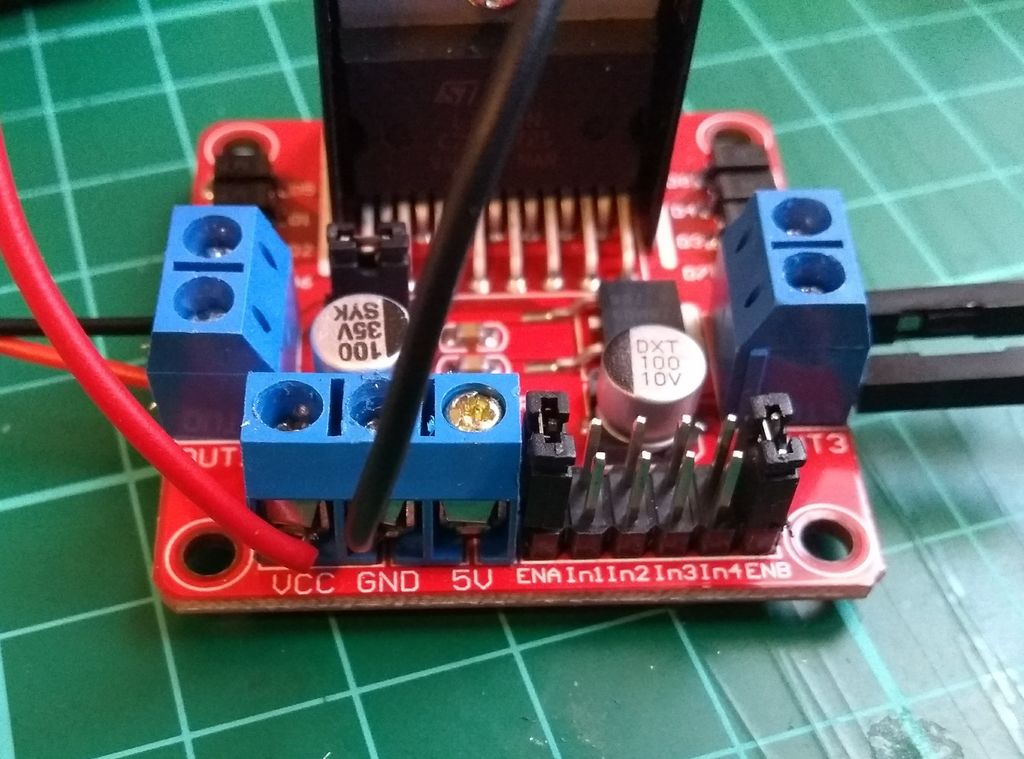
松開標有 VCC,GND 和 5V 的接線盒中的螺釘。拿起AA電池座,然后將紅色導線插入 VCC 接線盒中。黑線進入 GND 塊。
擰緊螺釘,使電線牢固地固定到位。
步驟4:將電動機連接至Rpi
該項目中使用的板需要連接到Raspberry Pi。其他板可能會以不同的方式連接,某些板可以簡單地作為HAT放置在Raspberry Pi GPIO引腳上。
此處使用的板上還有標記為In1,In2,In3和In4的引腳。作為兩個GND引腳。您可以使用Pi上的哪個GPIO引腳來決定;在該項目中,使用了GPIO 7、8、9和10。如果您的電路板沒有GND引腳,則可以使用Rpi中的GND引腳獲得相同的結果。如果需要執行此操作,請將GND線插入與電池組中黑色線相同的端子排中。
使用T型補鞋匠+連接面包板和Rpi。
使用五根公對公跳線連接到面包板。
In1-》 GPIO 7
In2-》 GPIO 8
In3-》 GPIO 9
In4-》 GPIO 10
步驟5:準備連接器
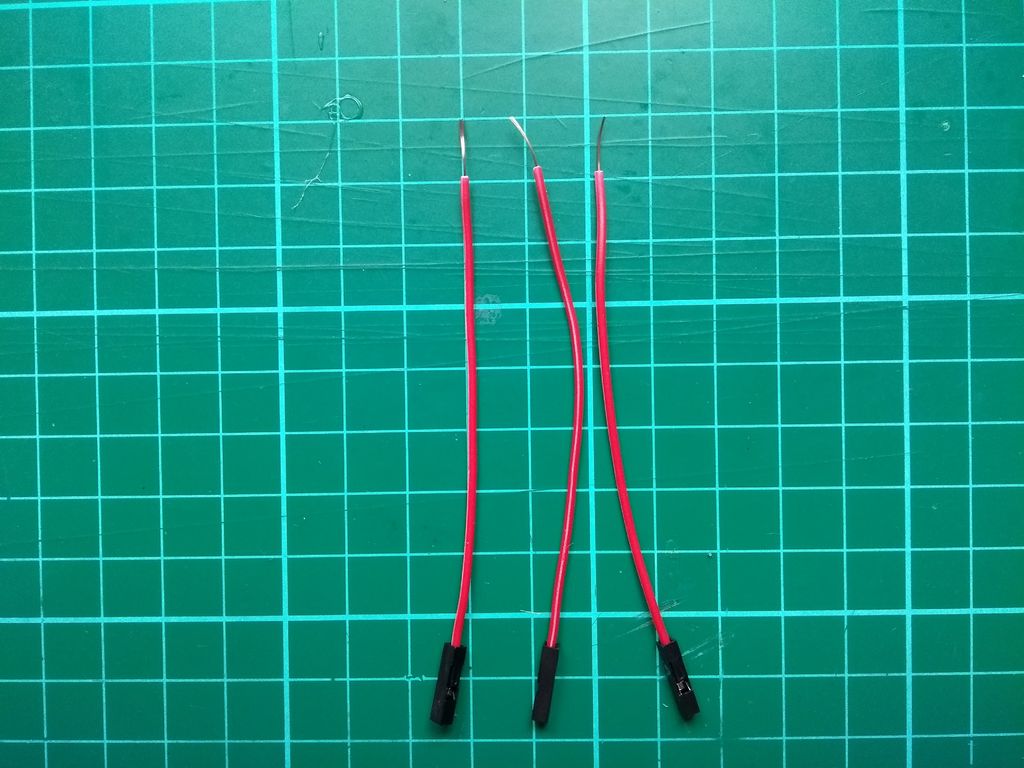
您的第一步將是將線傳感器連接到越野車。通常,本教程中使用的線傳感器類型需要連接到3V3引腳,但是您將通過同一電源引腳運行兩個傳感器,因此將它們都連接到5V引腳。
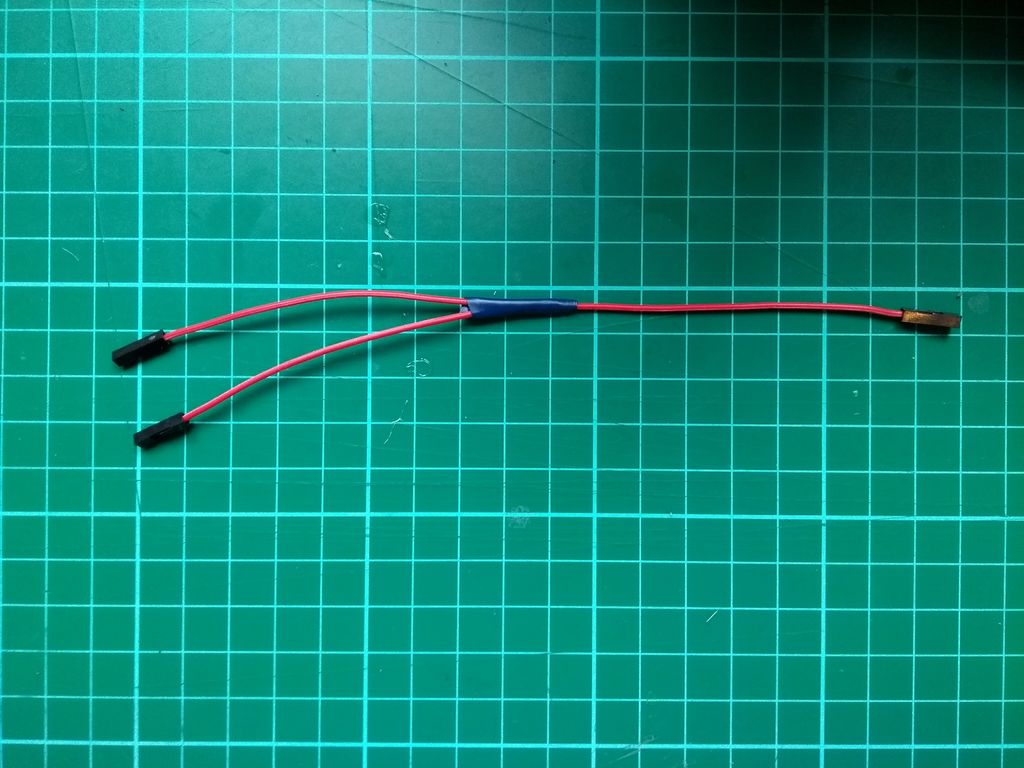
取三根母對母跳線,從兩端拔下連接器,然后剝去塑料護套,露出下面一厘米左右的多芯電線。抓住三根跳線,將其多芯線絞在一起。然后使用烙鐵將引線鍵合。用少量絕緣膠帶覆蓋引線的連接。
用另外三根母對母跳線重復整個過程。
步驟6:連接線路傳感器
每個線路傳感器都有三個引腳: VCC 用于供電, GND 接地,DO進行數字輸出。
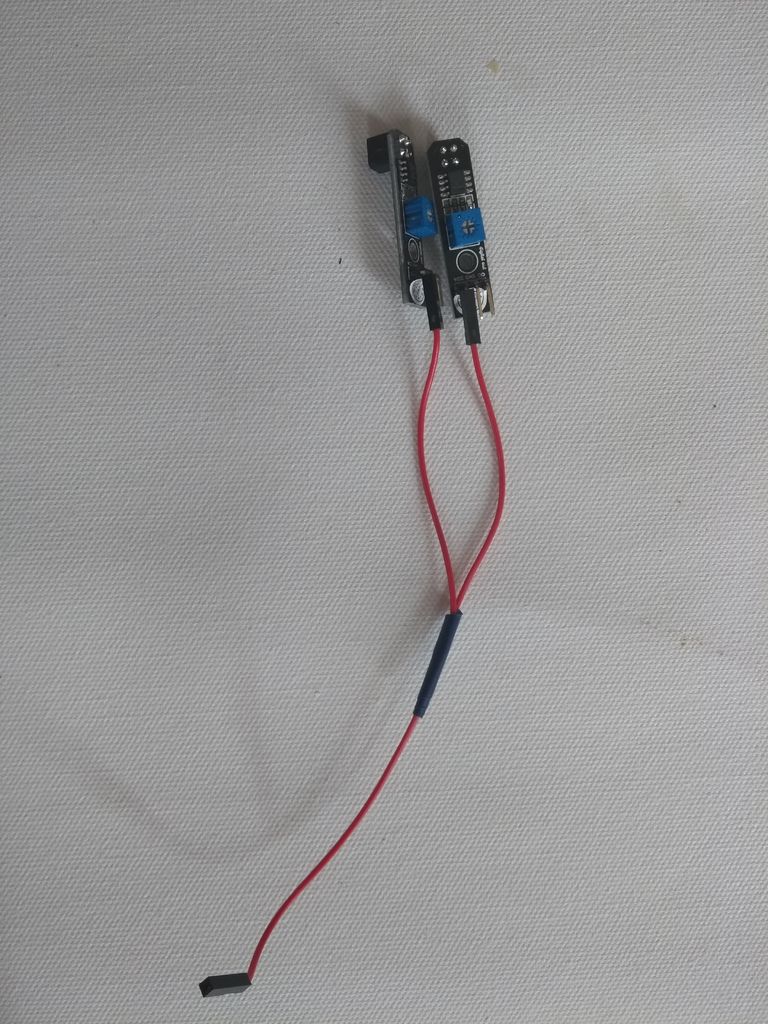
將一根焊接在一起的三線跨接線引出一根,并將其兩端連接到 VCC 分別位于兩個傳感器的引腳上。
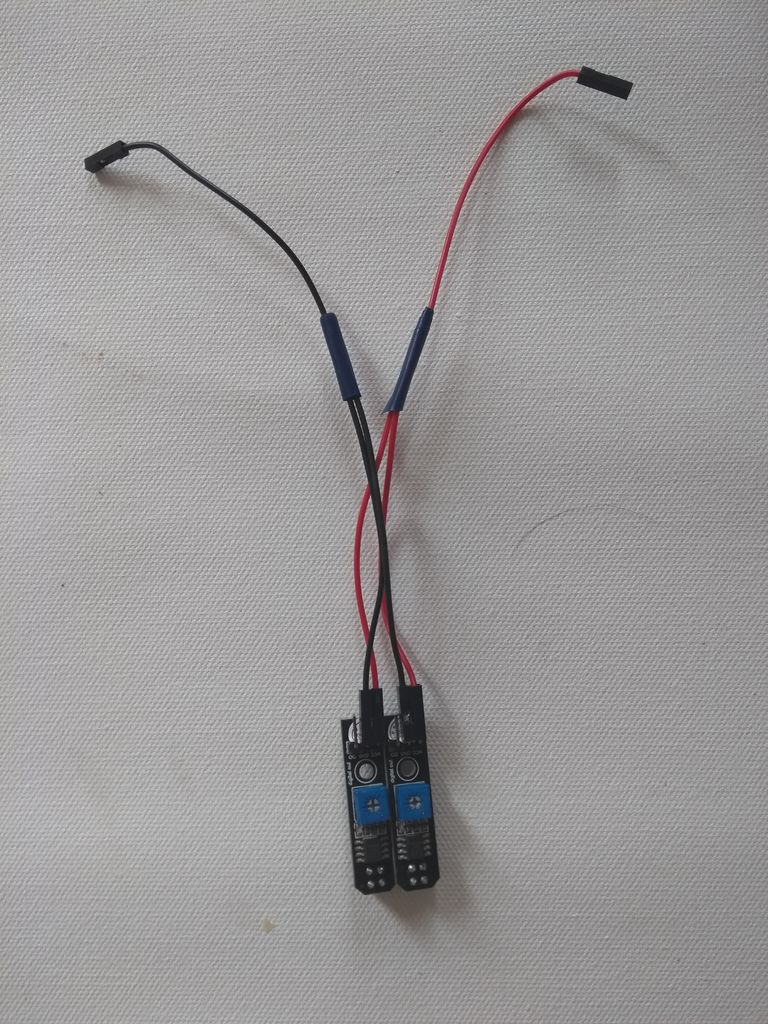
拿第二根焊接的跨接引線,并將兩端連接到每個線傳感器的 GND 引腳上。
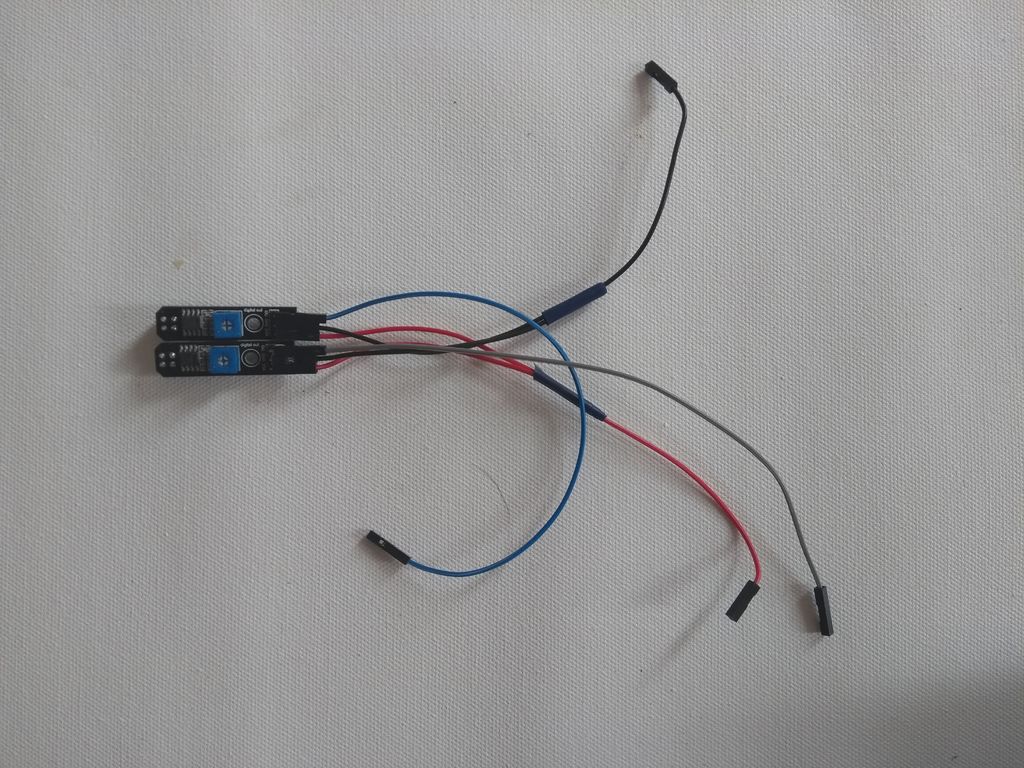
接剩下的兩根單跳線,并將每根跳線連接到每個線傳感器上的 DO 引腳。
現在連接 VCC 引腳將兩個線感測器連接到Raspberry Pi上的 5V 引腳,并將傳感器的 GND 引腳連接到Raspberry Pi上的 GND 引腳。兩個 DO 引腳中的每一個都可以連接到任何編號的GPIO引腳。在此示例中,使用了 GPIO 17 和 GPIO 27 引腳。
步驟7:測試線路傳感器
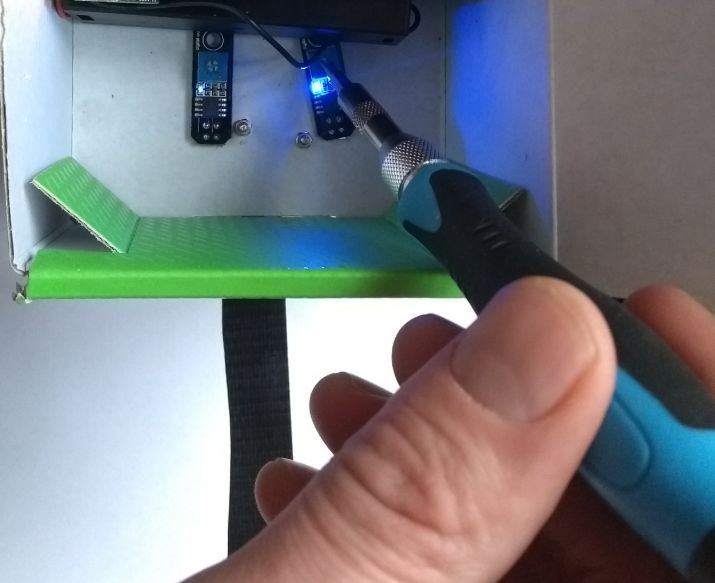
這是一個非常簡單的步驟。您的線傳感器上有一個LED,當通電時,該LED保持點亮。但是,一旦將其暴露在黑線中,它們就會消失。線傳感器應該是這種情況。
如果您認為它太靈敏,請使用螺絲刀并通過其電位計對其進行調整。
第8步:將程序插入Python
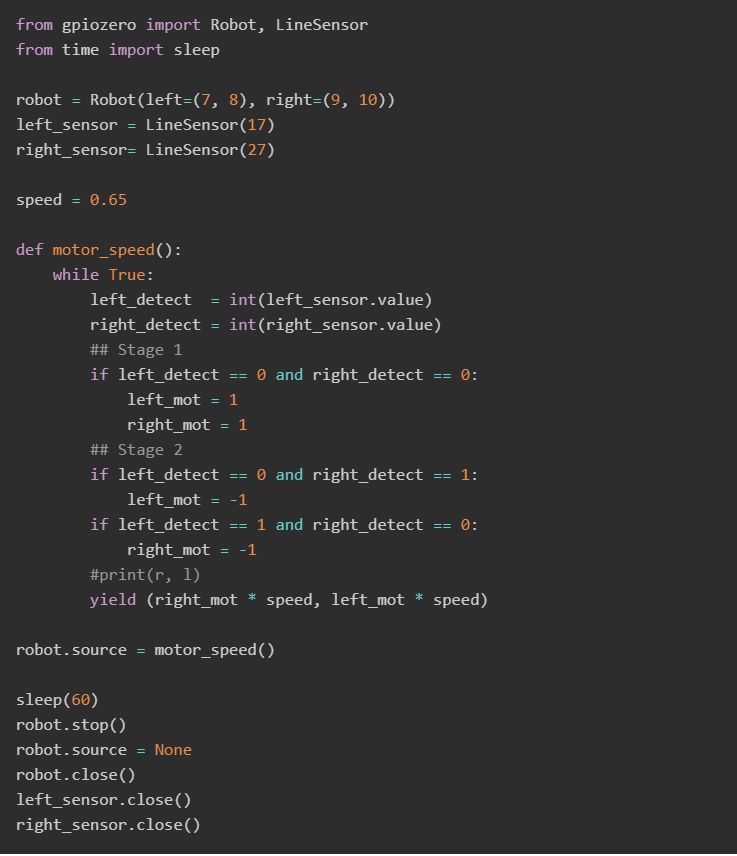
插入這些代碼行并運行它,您應該擁有一個可以在軌道上完美運行的機器人。
-
機器人
+關注
關注
213文章
29706瀏覽量
212680 -
電機控制板
+關注
關注
0文章
6瀏覽量
6993
發布評論請先 登錄
人形機器人“造車”,車企扎堆布局!

盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
焊接機器人拖拽軌跡怎么設置

愛普生SGPM01助力智能泳池清潔機器人導航方案





 工商網監
工商網監
評論