 螺旋槳時鐘DIY圖解
螺旋槳時鐘DIY圖解
步驟1:8051
8051是40針微控制器IC,用于這個項目
我已經在通用電路上實現了PCB和其他連接直接拖動并與LED相連。這個項目建議我Anupam Dubey做這個驚人的項目。
第3步:電路圖
此電路的電路圖在Propeller Clock PDF文件中給出,請下載以獲取原理圖。
步驟4:PCB布局

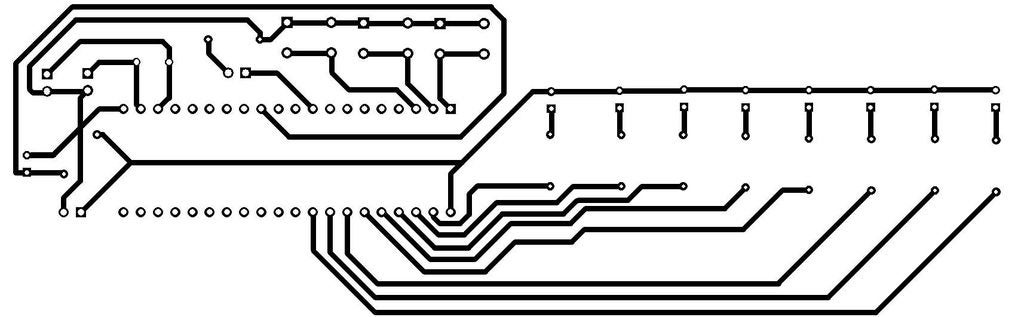
我已經在Dip Trace PCB Designer軟件中進行了PCB布局。它給了我螺旋槳時鐘的PCB布局,但是對于我的項目,我在通用PCB上制作電路,如果有人要在設計的PCB上制作它,我就將其上傳到PCB上,然后可以很容易地從PCB設計中提取出來。而且此設計僅適用于8051
第5步:編程
此處提供了編程及其十六進制文件,因此您可以使用適當的ISP/直接燒寫8051controller ic裝載機。我曾經使用Keil Programmer進行編程,而我使用Flash Magic loader進行了燒錄,因為您可以使用
mikroC PRO for 8051進行編程,其Flash刻錄機也可以通過其設置文件獲得。
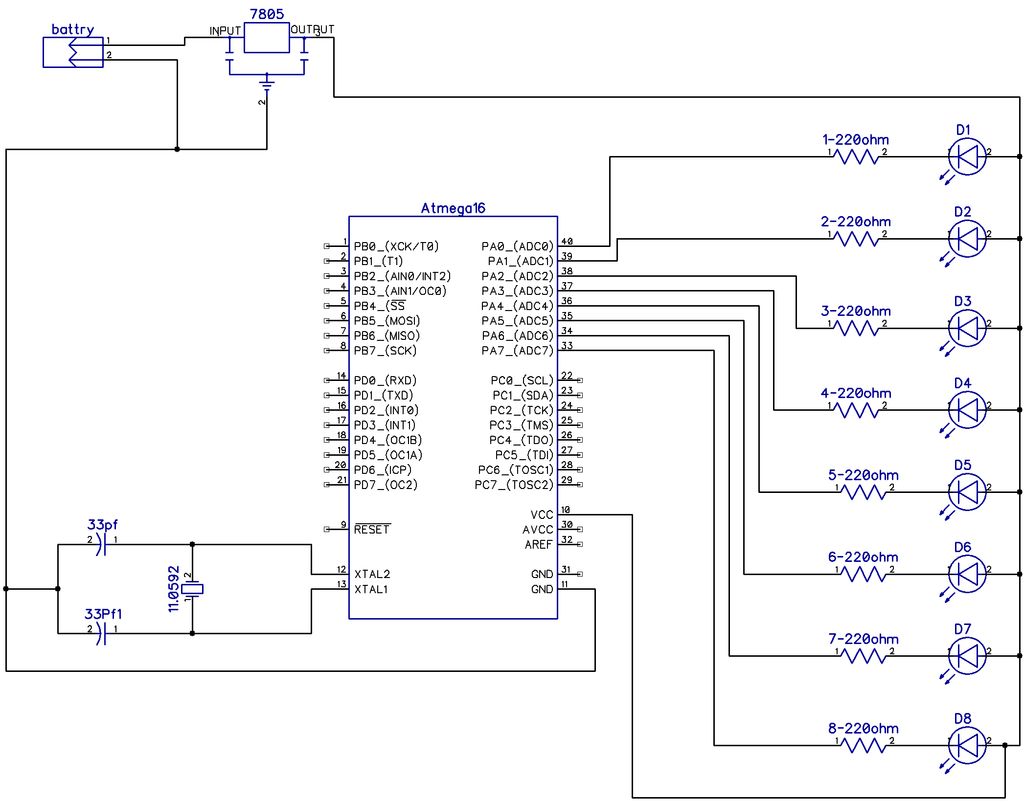
第6步:使用Atmega16進行POV螺旋槳按摩顯示
現在我已經使用atmega16制作了新的POV螺旋槳顯示,您還可以使用atmega8使其更便宜,更簡單,更緊湊。
步驟7:電路和編碼
第8步:完成按摩的方法

在POV按摩顯示器中,通常可以建立兩種類型的電路,一個是高電平有效,另一個是低電平有效。
我們知道這個概念,因此,高電平有效電路在邏輯為“ 1”時使LED點亮,而低電平有效電路在邏輯“ 0”時使LED點亮。被申請;被應用。因此,到目前為止,這里給出的概念圖是為您自己的按摩制作自己的代碼。
步驟9:所有活躍狀態下所有單詞的源代碼
此源文件可在POV螺旋槳顯示中提供任何名稱的任何符號書寫。
注意 :-
僅當您以高電平有效模式制作POV顯示時,此代碼才用于 ACTIVE HIGH 電路,然后只需將該代碼覆蓋所有單詞和PDF中提供的任何符號即可。
-
8051
+關注
關注
3文章
311瀏覽量
52119 -
時鐘
+關注
關注
11文章
1879瀏覽量
132840
發布評論請先 登錄
PCB封裝圖解
燧原科技正式納入飛槳例行版本發布體系

百度飛槳框架3.0正式版發布
請問ST無刷電機控制器-最高控制可調節轉速是多少?
CASAIM助力ABB完成螺旋槳推進器三維掃描及檢測
圖文動畫深度解析:航空發動機的類型及其工作原理
dsPIC33EP32MC204無人機螺旋槳參考設計用戶指南

無人機+物聯網促動低空經濟高潛力增長
定華雷達儀表學堂:攪拌和真空情況的高頻雷達物位計
在Ubuntu 24.04 LTS上安裝飛槳PaddleX
ATA-3080C功率放大器在螺旋載荷下管中彎曲模態導波研究中的應用






 工商網監
工商網監
評論