 石英加速度計在無人機與定位系統領域的應用
石英加速度計在無人機與定位系統領域的應用
導航制導與控制是無人機系統中最復雜的系統,其功能可以有多種劃分方法,今天我們主要對無人機導航制導與控制系統的基本原理和常用方法做一下介紹和歸納。
導航:即無人機獲得自己當前(在某個參照系下)的位置、速度等信息,必要時還需要獲得當前(相對于某個參照系)的姿態、姿態角速度等信息。例如,采用純慣性導航可以獲得無人機在某個慣性系下的位置、速度和加速度,以及相對于該慣性系的姿態角和角速度;GPS導航系統則可以提供無人機在WGS84坐標系下的速度、位置和航向角等信息;而借助如Vicon、UWB等室內定位系統則可以獲得無人機相對于室內某個坐標系的速度、位置等信息。因此,簡要概括導航的主要工作就是要“知道自己在哪,知道自己的姿態”。
制導:即無人機發現(或外部輸入)目標的位置、速度等信息,并根據自己的位置、速度以及內部性能和外部環境的約束條件,獲得抵達目標所需的位置或速度指令。例如,按照規劃的航路點飛行時,計算無人機徑直或者沿某個航線飛抵航路點的指令;采用基于計算機視覺目標跟蹤的光學制導時,根據目標在視場中的位置(以及攝像頭可能存在的離軸角)計算跟蹤目標所需的過載或者姿態角速度指令;而當預裝(或SLAM獲得的)地圖中存在需要規避的障礙物或禁飛區時,根據無人機飛行性能計算可行的規避路線或者速度指令。因此,簡要概括制導的主要工作就是要“知道目標在哪,如何抵達目標”。
控制:即無人機根據當前的速度、姿態等信息,通過執行機構作用來改變姿態、速度等參數,進而實現穩定飛行或跟蹤制導指令。例如,當固定翼無人機需要爬升高度時,計算需要的俯仰角和俯仰角速度指令,以及為了讓空速不至于大幅降低所需的油門指令;當沿著航線飛行,但是存在側風時,計算所需的偏航角指令以利用側滑抵消側風影響;或者當多旋翼無人機的某個旋翼失效時,計算如何為剩余旋翼分配指令以盡可能實現穩定飛行。因此,簡要概括控制的主要工作就是“改變飛行姿態,跟蹤制導指令”。
而石英撓性加速度計在重力場中,線加速度計可以測量重力加速度變化。當其敏感軸向垂直于水平面時,加速度計指示單位重力加速度;若敏感軸向發生傾斜,其輸出為重力加速度與傾斜角度的正弦函數之乘積。利用這一原理,可以用作傾斜測量和調平。這就是石英加速度計在導航制導中的作用
-
UWB
+關注
關注
32文章
1164瀏覽量
62383 -
無人機
+關注
關注
230文章
10757瀏覽量
185731 -
石英加速度計
+關注
關注
1文章
11瀏覽量
2474
發布評論請先 登錄
石英晶振在無人機領域的應用

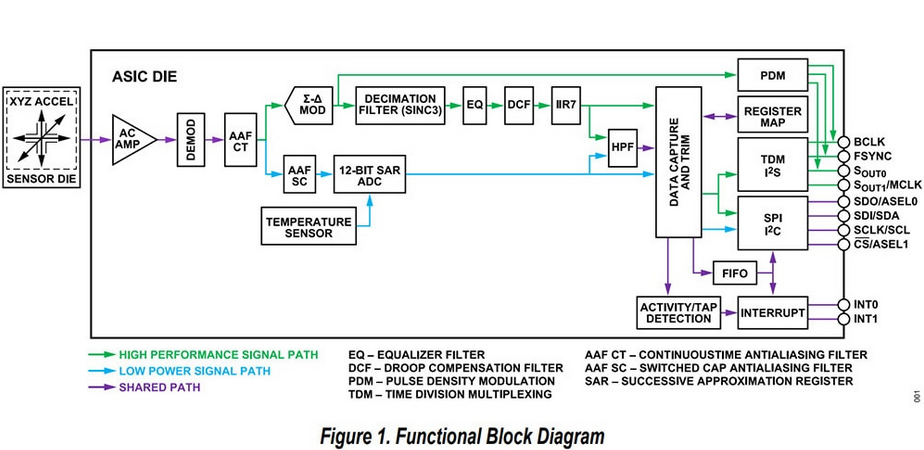
ADXL382 低噪聲密度、低功耗、3 軸加速度計數據手冊和產品介紹
高性能石英加速度計,滿足最嚴苛應用需求
揭秘無人機飛行奧秘:如何實現高難度控制?
ADS1258 AVSS 5ms內電壓跳變后,讀取加速度計的值變為原來的一半是為什么?
MEMS加速度計的工作原理是什么
PCB Piezotronics推出357A67型三軸電荷輸出加速度計

EPSON工業級加速度計選型

e2studio開發三軸加速度計LIS2DW12(4)----測量傾斜度

e2studio開發三軸加速度計LIS2DW12(2)----基于中斷信號獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據
用于安全和安保的Epson加速度計






 工商網監
工商網監
評論