") 激光雷達的標定_激光雷達的功能
激光雷達的標定_激光雷達的功能
激光雷達的標定
1、旋轉(zhuǎn)
三個角度,旋轉(zhuǎn)角、俯仰角、橫擺角
可以涉及到投影,投影是平行投影。
這里傾角會有不同,但是投影的形狀是一定的。三角形投影下來,還是三角形。
人為的傾斜雷達,他們測量得到的距離是相對于雷達坐標系的,而并不是相對于車體坐標系的。
坐標系:笛卡爾坐標系

橫擺角矯正:xy平面
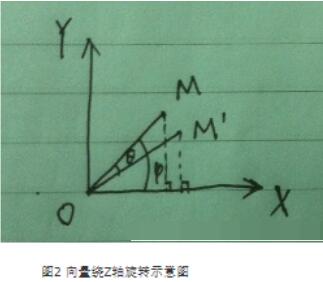
xx=xcosa+ysina
yy=ycosa–xsina
俯仰角矯正:yz平面
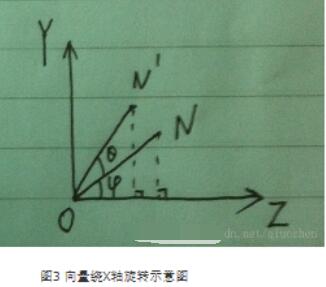
yy=ycos+zsina
zz=zcosa–ysina
旋轉(zhuǎn)角矯正:xz平面
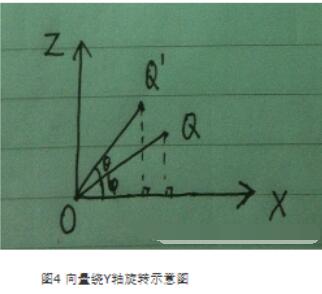
xx=xcosa-zsina
zz=zcosa+xsina
合起來就是一個四維的旋轉(zhuǎn)矩陣。
2、平移
xx=xx+w;
yy=yy+h;
zz=zz+z;
通過以上6個參數(shù):三個角,三個偏移,就可以解決多線激光雷達標定問題。
激光雷達的功能
激光雷達具有高精度電子地圖和定位、障礙物識別、可通行空間檢測、障礙物軌跡預測等功能。
(1)高精度電子地圖和定位利用多線束激光雷達的點云信息與車載組合慣導采集的信息,進行高精度電子地圖制作。無人駕駛汽車利用激光點云信息與高精度電子地圖匹配,以此實現(xiàn)高精度定位。
(2)障礙物識別利用高精度電子地圖限定感興趣區(qū)域(ROI)后,根據(jù)障礙物特征和識別算法,進行障礙物檢測與識別。
(3)可通行空間檢測利用高精度電子地圖限定ROI后,可以對ROI內(nèi)部(比如可行駛道路和交叉口)點云的高度及連續(xù)性信息判斷點云處是否可通行。
(4)障礙物軌跡預測根據(jù)激光雷達的感知數(shù)據(jù)與障礙物所在車道的拓撲關(guān)系(道路連接關(guān)系)進行障礙物的軌跡預測,以此作為無人駕駛汽車規(guī)劃(避障、換道、超車等)的判斷依據(jù)。
-
激光雷達
+關(guān)注
關(guān)注
971文章
4212瀏覽量
192257
發(fā)布評論請先 登錄
CES 2025激光雷達觀察:“千線”激光雷達亮相,頭部廠商布局具身智能

SPAD席卷車載激光雷達市場
激光雷達調(diào)研紀要
DeepSeek:2025年激光雷達技術(shù)與行業(yè)應用趨勢

激光雷達領(lǐng)域的新秀利器—SPAD23

禾賽拒絕“激光雷達無用論”

一則消息引爆激光雷達行業(yè)!特斯拉竟然在自研激光雷達?
激光雷達,明年要降價至200美元

激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術(shù)的基于深度學習的進步
激光雷達技術(shù)的發(fā)展趨勢
光學雷達和激光雷達的區(qū)別是什么
激光雷達點云數(shù)據(jù)包含哪些信息
一文看懂激光雷達






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論