 基于神經網絡PID控制器的設計提高系統的魯棒性和可靠性
基于神經網絡PID控制器的設計提高系統的魯棒性和可靠性
1. 引言
PID(比例-積分-微分)控制器作為最早實用化的控制器已有50多年歷史,因其具有算法簡單、魯棒性好、可靠性高、直觀性好等優點被廣泛的應用于工業過程控制及運動控制中。常規PID控制效果的優劣,不僅僅取決于控制系統模型的精確程度,還必須調整好三個參數的關系,而這種關系不一定是簡單的線性組合。實際的工業過程及運動過程往往具有時變性、變參數、變結構等不確定性及很強的非線性,精確的數學模型難以建立,此外,常規PID還有實現在線調整困難,參數間相互影響,參數整定時間長等缺點,難以取得理想的控制效果。
隨著控制理論的發展,將應用廣泛的PID控制器與智能控制理論相結合成為智能控制研究的新方向,神經網絡算法具有逼近任意非線性表達能力,很強的自學習能力和概括推廣能力,在解決高度非線性和不確定系統方面有很大的的潛能,應用神經網絡,可以從復雜的PID三個參數組合中尋求最佳的線性組合,使神經網絡和PID本質結合。從而使得控制器具有較好的自適應性,實現參數的自動實時調節,適應過程的變化,提高系統了的魯棒性和可靠性。
2. BP神經網絡
2.1 BP神經網絡的構成及設計
BP神經網絡是一種具有三層或三層以上的神經網絡,包括輸入層、隱含層、輸出層,上下層之間實現全連接,而每層神經元之間無連接。當一對學習樣本提供給網絡后,神經元的激活值從輸入層經各中間層向輸出層傳播,在輸出層的各神經元獲得網絡的輸入響應。接下來,按照減少目標輸出與實際誤差的方向,從輸出層經過各中間層逐層修正各連接權值,最后回到輸入層,這種算法即BP算法。隨著這種誤差逆的傳播修正不斷進行,網絡對輸入模式響應的正確率也不斷上升。
(1)輸入輸出層的設計
輸入層的設計可以根據需要求解的問題和數據表示方式確定,若輸入信號為模擬波形,那么輸入層可以根據波形的采樣點數目撅腚輸入單元的維數,也可以用一個單元輸入,這是輸入樣本為采樣的時間序列。輸出層的維數可以根據使用者的要求確定。如果BP網絡用作分類器,類別模式一共有m個,那么輸出層神經元的個數為m或者。
(2)隱層的設計
隱層單元的數目與問題的要求、輸入/輸出單元的數目都有直接的關系,隱單元的數目太多會導致學習時間過長、誤差不一定最佳,也會導致容錯性差、不能識別以前沒有的樣本等等,因此,一定存在一個最佳的隱單元數,通常用以下三個公式來選擇最佳隱單元數:
一個典型的三層神經網絡結構如下圖所示:
圖1 BP神經網絡結構圖
3. 神經網絡PID控制器及控制算法
1、BP神經網絡PID控制器結構如下圖所示:
圖2 神經網絡控制器結構圖
由圖可知:控制器由兩部分組成,分別為常規PID控制和神經網絡,其中,常規PID直接對被控對象進行閉環控制,并且其控制參數Kp、Ki、Kd為在線調整方式;神經網絡,根據系統的運行狀態,調節PID控制器的參數,以期達到某種性能指標的最優化,使輸出層神經元的輸出對應于PID控制器的三個可調參數。通過神經網絡的自學習、加權系數的調整,使神經網絡輸出對應于某種最優控制規律下的PID控制器參數。
2、控制算法
神經網絡PID的控制算法如下:
(1)。 確定神經網絡的結構,即確定輸入節點數和隱含層節點數,并給出各層加權系數的初值和,并選定學習速率 和慣性系數 ,令k =1;
(2)。 采樣得到r(k)和y(k),計算當前時刻誤差error(k)= r(k)-y(k);
(3)。 計算各神經網絡的輸入、輸出,其輸出層的輸出即為PID控制器的三個控制參數Kp、Ki、Kd;
(4)。 計算 PID控制器的輸出;
(5)。 進行神經網絡學習,在線調整加權系數,實現 PID控制參數的自適應調整;
(6)。 令k=k+1,返回第(1)步。
4. 仿真實例
4.1 被控對象
設被控對象的近似數學模型為:
所選的輸入信號為一時變信號:
神經網絡的結構選擇4-5-3,學習速率為0.55,慣性系數為0.04,加權系數初始值為區間[-0.5,0.5]上的隨機數,采樣頻率為1000Hz。
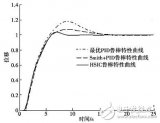
Matlab仿真結果如圖三所示:
圖3-1 輸入輸出曲線
圖3-2 誤差曲線
4.2 仿真結果分析
由仿真曲線可以看出,神經網絡PID穩態誤差小,解決了常規PID超調,抖動等問題,控制精度高,實現了對控制信號幾乎相同的跟蹤,具有較好的快速性和適應性。
5. 結語
神經網絡PID控制器實現了兩種算法本質的結合,借助于神經網絡的自學習,自組織能力,可實現PID參數的在線調整,控制器自適應性好;該算法不要求被控對象有精確的數學模型,擴大了應用范圍,控制效果良好;在合理選擇神經網絡的結構的情況下,該算法有很強的泛化能力。基于以上優點,神經網絡PID控制器具有很好的發展應用前景。
責任編輯:gt
-
控制器
+關注
關注
114文章
17026瀏覽量
183297 -
神經網絡
+關注
關注
42文章
4811瀏覽量
103036 -
PID
+關注
關注
37文章
1480瀏覽量
87546
發布評論請先 登錄
基于BP神經網絡的分布式傳感器網絡的可靠性分析
復雜溫度系統的PID神經元網絡控制研究

魯棒性是什么意思_Robust為什么翻譯成魯棒性





 工商網監
工商網監
評論