") 機器人原始程序布局狀態(tài)與改進后的布局狀態(tài)
機器人原始程序布局狀態(tài)與改進后的布局狀態(tài)
原始程序布局狀態(tài)
改進后的布局狀態(tài):
1.將機器人E14機器人安全加入光電及升降門信號。
2.機器人安全門回路加入光電和升降門信號。
3.誤闖光電會引起工作組1報安全門故障。
1.將機器人E14機器人安全加入光電及升降門信號。
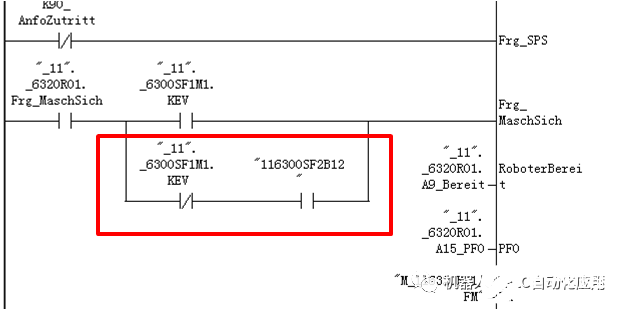
編程速度快,改動最小,影響范圍小,安全系數(shù)低。
2.機器人安全門回路加入光電和升降門信號。
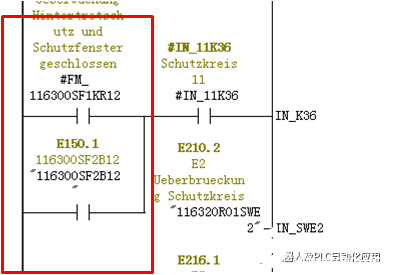
打開升降門后,如果擋光電會引起機器人2號的安全門回路斷開,使機器人以安全停止1的方式停止。
相對1的解決方案,這個方案的安全系數(shù)更高,完全控制了2 號機器人,但當人員跨過新加光柵后,3號/4號機器人仍然在運動,還是有一定的安全風險。
3.誤闖光電會引起工作組1報安全門故障。
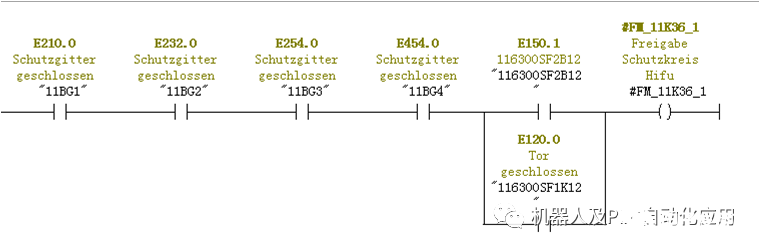
并入安全門控制回路,如果開著升降門直接闖過光柵,將使整個工作組1停止產(chǎn)生安全門開故障。
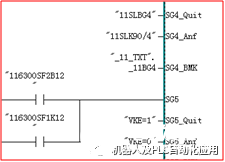
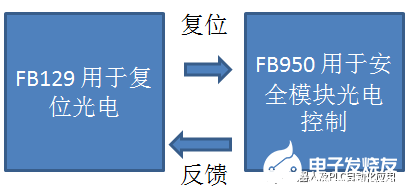
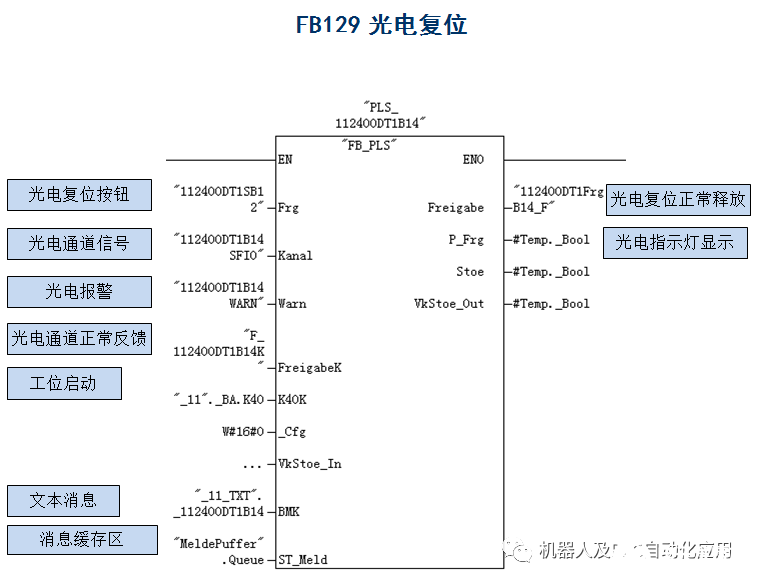
光電復位示意圖:
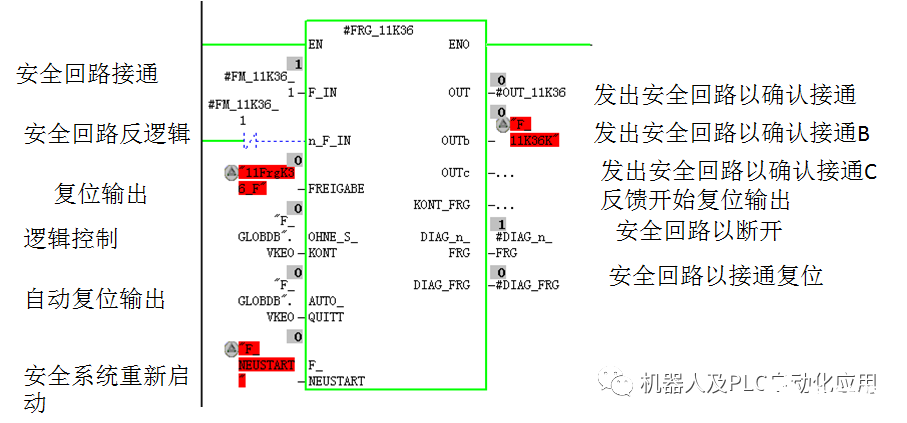
FB950接口設置
責任編輯:pj
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29568瀏覽量
211952 -
光電
+關注
關注
8文章
781瀏覽量
82286 -
回路
+關注
關注
0文章
73瀏覽量
12321
發(fā)布評論請先 登錄
相關推薦
熱點推薦
人形機器人“造車”,車企扎堆布局!
電子發(fā)燒友網(wǎng)報道(文/黃晶晶)12月26日,廣汽集團正式發(fā)布自主研發(fā)的第三代具身智能人形機器人——GoMate。在業(yè)界引發(fā)新一輪人形機器人的關注。實際上,已經(jīng)有不少車企進入了人形機器人這一賽道,并且

盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產(chǎn)品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
海康機器人布局關節(jié)機器人業(yè)務
關節(jié)機器人領域迎來一位實力選手。繼布局移動機器人、機器視覺業(yè)務后,海康機器人正在拓展新的產(chǎn)品線。
機器人當下廣東如何布局
機器人國際標準的特大喜訊報道更是振奮人心!是時候我們的地方政府開始大顯身手抓緊布局發(fā)力了。廣東作為國家經(jīng)濟貢獻度非常重要的大省,也是國家大戰(zhàn)略粵港澳大灣區(qū)核心地帶之

邊緣計算網(wǎng)關支持采集哪些機器人品牌
,進而優(yōu)化生產(chǎn)布局和工藝順序,減少不必要的等待時間,提升整體生產(chǎn)效率。 對此,物通博聯(lián)提供廣泛兼容的機器人邊緣數(shù)采網(wǎng)關,支持ABB、發(fā)那科、埃斯頓、安川、現(xiàn)代、雅馬哈、固高等工業(yè)機器人,實時采集設備

安川(YASKAWA)機器人智能管理平臺有哪些功能
安川(YASKAWA)機器人智能管理平臺具備以下功能: 設備管理與監(jiān)控 實時狀態(tài)監(jiān)測 :平臺能夠實時獲取機器人的運行狀態(tài),包括是否處于工作中、空閑狀
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
,一次生成深度信息。
自主機器人定位任務的本質是對機器人自身狀態(tài)的估計問題,包括位置,朝向,速度等問題。
路徑規(guī)劃旨在找到從起點到目標區(qū)域的路徑,確保路徑的可行性和最優(yōu)性。路徑規(guī)劃方法包括變分方法,圖搜
發(fā)表于 01-04 19:22
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
的局限性以及衡量大模型的關鍵指標。閱讀了該部分后,我感受到了一種前所未有的震撼,這種震撼不僅來源于技術本身的先進性,更來源于它對傳統(tǒng)機器人控制方式的顛覆。
傳統(tǒng)機器人的局限性與大模型的變革
傳統(tǒng)的
發(fā)表于 12-29 23:04
鴻海布局護理機器人領域
近日有報道稱,鴻海集團B事業(yè)群暨數(shù)位健康部門的總經(jīng)理姜志雄透露,鴻海正在積極布局護理機器人領域。這一舉措旨在通過整合先進的人工智能(AI)技術,為護理師提供強有力的支持,幫助他們解決日常工作中重復性
全球巨頭加速布局人形機器人賽道
近日,英偉達傳出消息,計劃在中國臺灣省建立人形機器人供應鏈,此舉無疑加劇了全球人形機器人市場的競爭態(tài)勢。與此同時,OpenAI所押注的1X technologies也日益成熟,應用場景不斷增多
云從科技積極布局AI與機器人新興產(chǎn)業(yè)集群
云從科技近日在互動平臺上透露,公司正在積極布局人工智能與機器人相結合的新興產(chǎn)業(yè)集群,旨在通過人工智能技術推動產(chǎn)業(yè)升級,并探索更多應用場景的可能性。
機器人語言系統(tǒng)包括三個基本狀態(tài)
機器人語言系統(tǒng)(有時也被稱為機器人語言操作系統(tǒng))確實包括三個基本狀態(tài),這些狀態(tài)是機器人程序運行和
元鼎智能再獲融資加速,智能庭院機器人布局未來可期
在智能科技日新月異的今天,專注于智能庭院解決方案的元鼎智能(Aiper)再次傳來振奮人心的消息。這家泳池機器人領域的佼佼者,近期成功完成了超6000萬美元的B輪及B+輪融資,標志著其在智能庭院機器人市場的布局邁入了一個全新的發(fā)展
Al大模型機器人
豐富的知識儲備。它們可以涵蓋各種領域的知識,并能夠回答相關問題。靈活性與通用性: AI大模型機器人具有很強的靈活性和通用性,能夠處理各種類型的任務和問題。持續(xù)學習和改進: 這些模型可以通過持續(xù)的訓練
發(fā)表于 07-05 08:52





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論