") 用IOCTL函數(shù)可以詢問機(jī)器人控制系統(tǒng)的節(jié)能模式?
用IOCTL函數(shù)可以詢問機(jī)器人控制系統(tǒng)的節(jié)能模式?

PROFIenergy可用來通過PROFINET 網(wǎng)絡(luò)控制能耗。為此要使用讓負(fù)載對計(jì)劃內(nèi)和計(jì)劃外中斷作出反應(yīng)的命令。
PROFINET Device 支持 PROFIenergy。在使用 PROFIenergy時(shí),機(jī)器人控制系統(tǒng)通過 PROFIenergy協(xié)議與上一級控制系統(tǒng)通訊。
選項(xiàng)卡 PROFIenergy
機(jī)器人控制系統(tǒng)支持以下的 PROFIenergy狀態(tài):
1.Ready_To_Operate:該控制器已準(zhǔn)備就緒。
2. 驅(qū)動總線關(guān)閉:驅(qū)動裝置已關(guān)閉。
3.Hibernate :控制系統(tǒng)處于休眠狀態(tài)并且只對 WakeOnLan包有反應(yīng)。
4. 制動器已制動:已制動制動器并且只對下一個(gè)運(yùn)行指令有反應(yīng)。
如果生產(chǎn)歇工很短,為了使用狀態(tài)驅(qū)動總線關(guān)閉,則可以用狀態(tài)制動器已制動節(jié)能。但是,只有在機(jī)器人控制系統(tǒng)處于編程停止?fàn)顟B(tài)下時(shí),才能激活狀態(tài)制動器已制動。
1狀態(tài)Ready_To_Operate.
2狀態(tài)驅(qū)動總線關(guān)閉、Hibernate 或制動器已制動。
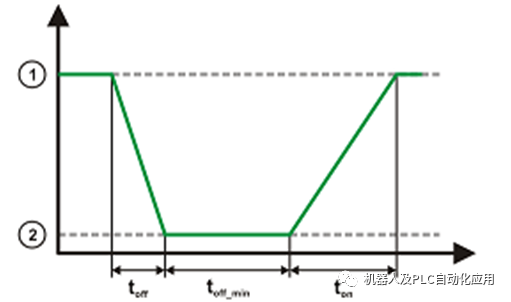
PROFIenergy狀態(tài)有以下特征:
Time_to_Pause (t off)
直到控制系統(tǒng)從狀態(tài)Ready_To_Operate達(dá)到狀態(tài)驅(qū)動總線關(guān)閉、Hibernate 或制動器已制動的時(shí)間間隔。
Time_min_length_of_stay (t off_min)
控制系統(tǒng)保持在驅(qū)動總線關(guān)閉、冬眠或制動器已制動狀態(tài)時(shí)的時(shí)間間隔。在驅(qū)動總線關(guān)閉和冬眠狀態(tài)時(shí),所有已連接的設(shè)備在該時(shí)間間隔中應(yīng)當(dāng)在重新啟動控制系統(tǒng)之前能完全關(guān)機(jī)。
Time_to_operate (t on)
直到控制系統(tǒng)從狀態(tài)驅(qū)動總線關(guān)閉、Hibernate 或制動器已制動到達(dá)狀態(tài) Ready_To_Operate的時(shí)間間隔。
歇工時(shí)間的默認(rèn)值與最小值相符。不能超過這些值。
可以通過安裝其它應(yīng)用程序包提高歇工時(shí)間。建議在投入運(yùn)行時(shí)測試所需的歇工時(shí)間。
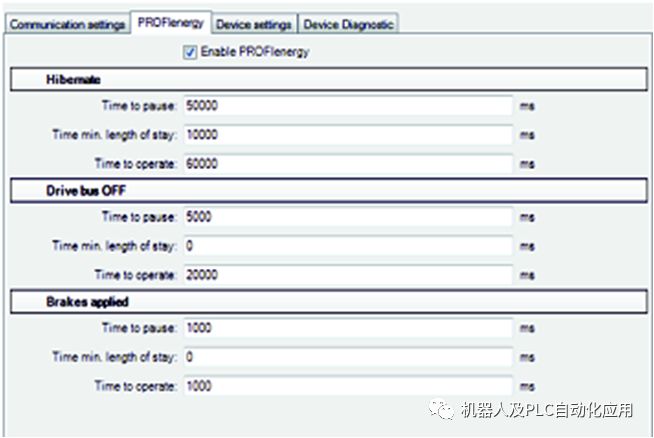
激活 PROFIenergyn
勾選:使用PROFIenergy。
未勾選:不使用 PROFIenergy。
默認(rèn)設(shè)定:未勾選
休眠
暫停時(shí)間:輸入控制系統(tǒng)直到已達(dá)到冬眠狀態(tài)允許需要的時(shí)間。
默認(rèn)值:50000ms
停留時(shí)間長度 (分鐘):
輸入控制系統(tǒng)應(yīng)該保持在冬眠狀態(tài)下的最小時(shí)間。
默認(rèn)值:10000 ms
運(yùn)轉(zhuǎn)時(shí)間:輸入控制系統(tǒng)直到已達(dá)到 Ready_To_Operate狀態(tài)允許需要的時(shí)間。
默認(rèn)值:60000ms
關(guān)閉驅(qū)動總線
暫停時(shí)間:輸入控制系統(tǒng)直到已達(dá)到驅(qū)動總線關(guān)閉狀態(tài)允許需要的時(shí)間。
默認(rèn)值:5000ms
停留時(shí)間長度 (分鐘):
輸入控制系統(tǒng)應(yīng)該保持在驅(qū)動總線關(guān)閉狀態(tài)下的最小時(shí)間。
默認(rèn)值:0 ms
運(yùn)轉(zhuǎn)時(shí)間:輸入控制系統(tǒng)直到已達(dá)到 Ready_To_Operate狀態(tài)允許需要的時(shí)間。
默認(rèn)值:20000ms
制動制動器
暫停時(shí)間:輸入控制系統(tǒng)直到已達(dá)到制動器已制動狀態(tài)允許需要的時(shí)間。
默認(rèn)值:1000ms
停留時(shí)間長度 (分鐘):
輸入控制系統(tǒng)保持在制動器已制動狀態(tài)下的最小時(shí)間。
默認(rèn)值:0 ms
運(yùn)轉(zhuǎn)時(shí)間:輸入控制系統(tǒng)直到已達(dá)到 Ready_To_Operate狀態(tài)允許需要的時(shí)間。
默認(rèn)值:1000ms
PROFIenergy指令
PLC 可借助PROFIenergy指令向機(jī)器人控制系統(tǒng)發(fā)出切換狀態(tài)或詢問信息的信號。為了能夠切換狀態(tài),機(jī)器人控制系統(tǒng)必須處于 AUT EXT 運(yùn)行模式下。
支持以下 PROFIenergy指令:
Start_Pause
機(jī)器人控制系統(tǒng)切換到驅(qū)動總線關(guān)閉狀態(tài)。
End_Pause
機(jī)器人控制系統(tǒng)重新從冬眠 / 驅(qū)動總線關(guān)閉狀態(tài)啟動。
Start_Pause_with_time_response
為了切換狀態(tài),詢問機(jī)器人控制系統(tǒng)總共需要的時(shí)間 (toff, t on和 t off_min)。
Info_Sleep_WOL
查明設(shè)備中有關(guān) PE_sleep_mode_WOL狀態(tài)的信息。
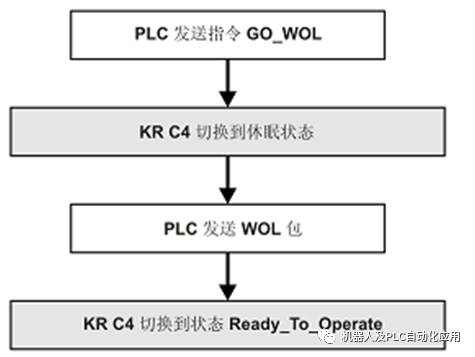
Go_WOL
將設(shè)備設(shè)置到狀態(tài) PE_sleep_mode_WOL(冬眠)中。
Get_Measurement_List 詢問所有支持測量的 ID。
KR C4 可提供3 個(gè)測量值供使用:
nID = 1: 當(dāng)前能耗在100 毫秒內(nèi)的平均值,單位:kW
n ID = 2: 上一個(gè)小時(shí)的能耗,單位:kW/h
n ID = 3: 測量啟動和停止之間的能耗,單位:kW/h
PLC 制造商可提供用于控制指令的模塊。PLC 可自動執(zhí)行幾個(gè)用戶不能執(zhí)行指令。
在西門子文件CommonApplication Profile PROFIenergy中,對使用 PROFIenergy指令和更多其它信息進(jìn)行了說明。
詢問機(jī)器人控制系統(tǒng)的節(jié)能模式
用 IOCTL函數(shù)可以詢問機(jī)器人控制系統(tǒng)的節(jié)能模式。
RET = IOCTL(“PNIO-DEV”,1002,0)
RET 的返還值:
-1. 出錯
1 。 機(jī)器人控制系統(tǒng)處于驅(qū)動總線關(guān)閉的狀態(tài)下
2 。 機(jī)器人控制系統(tǒng)處于制動器已制動的狀態(tài)下
255 。機(jī)器人控制系統(tǒng)處于待機(jī)的狀態(tài)下
256 .PROFIenergy未初始化
257 機(jī)器人控制系統(tǒng)處于過渡狀態(tài)下
通過 PROFINET進(jìn)行電源管理
以下信號可供用于激活或停用各種節(jié)能模式以及識別機(jī)器人控制系統(tǒng)的狀態(tài)。
這些功能只能在運(yùn)行模式 EXT 下執(zhí)行,而不能在T1 或 T2 下執(zhí)行。
電源管理指的不是 PROFIenergy。電源管理信號在目錄C:KRCROBOTERConfigUserCommon 下的文件 CabCtrl.xml 中進(jìn)行配置。

輸入字節(jié) 0
0 位AB 驅(qū)動總線0 = 接通驅(qū)動總線,條件:HIB = 0 和 KS = 01 = 關(guān)斷驅(qū)動總線,條件:HIB = 0 和 KS = 0
1位 HIB 休眠0 = 無功能1 = 使控制器休眠,條件:AB = 0 和 KS = 0
2 位KS 冷啟動0 = 無功能1 = 使控制器冷啟動,條件:AB = 0 和 HIB = 0
3 … 7 RES 備用
輸出字節(jié) 0
0位 AB 驅(qū)動總線0 = 驅(qū)動總線已接通1 = 驅(qū)動總線已關(guān)斷
1 位BBS 機(jī)器人控制系統(tǒng)的待機(jī)運(yùn)行狀態(tài)0 = 機(jī)器人控制系統(tǒng)尚未做好運(yùn)行準(zhǔn)備1 = 機(jī)器人控制系統(tǒng)已經(jīng)準(zhǔn)備就緒
2 … 7 RES 備用
責(zé)任編輯:pj
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6771瀏覽量
111975 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29636瀏覽量
212264 -
電源管理
+關(guān)注
關(guān)注
117文章
6426瀏覽量
145979
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論