 KUKA機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
KUKA機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
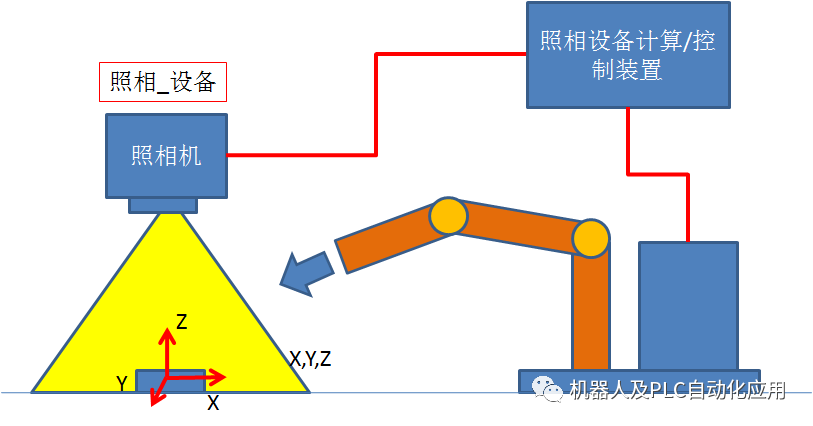
視覺抓取主要是通過改變機器人的TOOL坐標系或BASE坐標系來實現的.
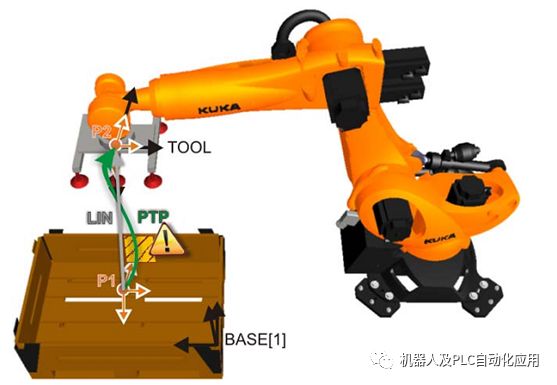
物體位置的變化主要是它位置的X,Y,Z 方向的變化.
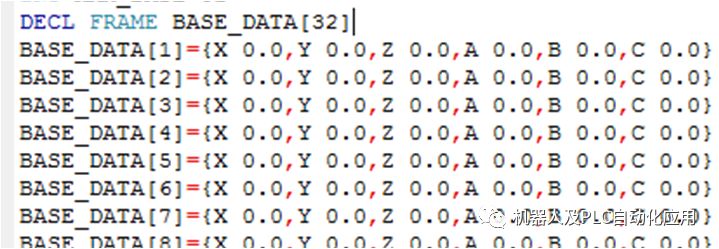
BASE坐標系:可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡單 。在用戶坐標系中, TCP 點將沿用戶自定義的坐標軸方向運動。
以改變BASE 坐標系為例:
KUKAC4 現在可以使用32個BASE 坐標系
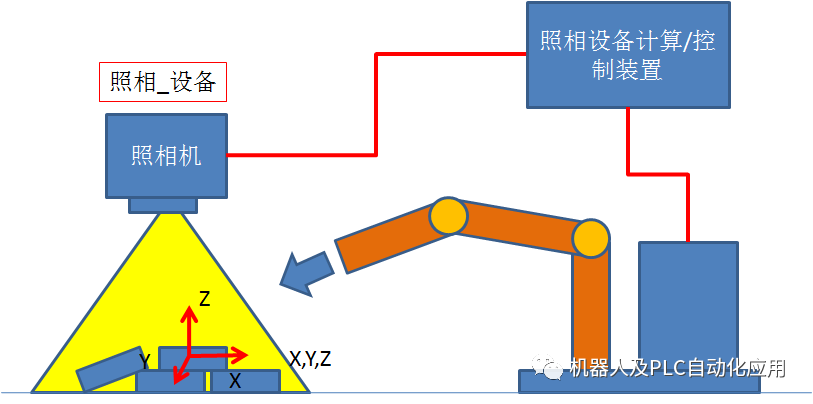
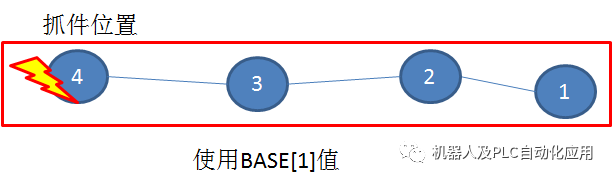
沒有使用視覺補償功能時,只用一個BASE坐標系.
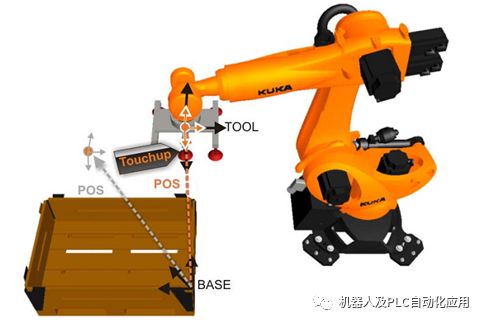
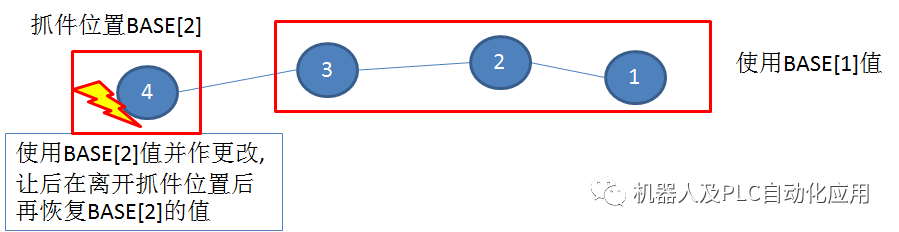
改變機器人BASE坐標系值從而改變機器人抓件位置,使用多個坐標系.
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29509瀏覽量
211644 -
視覺
+關注
關注
1文章
155瀏覽量
24291 -
KUKA機器人
+關注
關注
4文章
144瀏覽量
9491
原文標題:KUKA 機器人視覺抓取的工作原理及Ethernet KRL軟件控制講解
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統、定位系統、導航系統、智能交互系統和運動系統協同工作,來實現為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統
傳感器類型 :機器人配備
發表于 05-10 18:26
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
閱讀心得體會:ROS2機器人視覺與地圖構建技術
通過對本書第7章(ROS2視覺應用)和第8章(ROS2地圖構建)的學習,我對機器人視覺感知和
發表于 05-03 19:41
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
識別聯調。
進迭時空致力于為智能機器人提供完整全棧優化的RISC-V AI軟硬件解決方案,第一代RISC-V AI CPU芯片K1已完成AI視覺感知、AI語音處理、自動避障、路徑規劃、運動控制等
發表于 04-25 17:59
復合機器人抓取精度的影響因素及提升策略
復合機器人結合了移動機器人(如AGV)和機械臂的功能,廣泛應用于物流、制造等領域。抓取精度是其核心性能指標之一,直接影響作業效率和產品質量。本文將探討復合機器人
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
工業機器人視覺技術的應用分為哪幾種?
工業機器人視覺技術的應用非常廣泛,涉及到許多不同的領域和場景。以下是一些主要的應用領域和相關技術: 物體識別與定位 物體識別與定位是工業機器人視覺技術的基礎應用之一。通過使用攝像頭和其
碼垛機器人的組成和工作原理
?碼垛機器人是一種自動化程度較高的設備,能夠大大提高生產效率和減輕人工勞動強度。松樂智能裝備這里分享一下碼垛機器人的組成和工作原理。 ?一、碼垛機器人是一種用于自動完成物品碼放的
機器人視覺的應用范圍
機器人視覺是一種將計算機視覺技術應用于機器人領域的技術,它使得機器人能夠感知和理解周圍環境,實現自主決策和執行任務。隨著人工智能、
機器人視覺的結構及工作原理
機器人視覺是一種利用計算機視覺技術實現機器人對環境的感知和理解的技術。它涉及到圖像采集、圖像處理、特征提取、目標識別、場景理解等多個環節。 機器人
工業機器人仿真軟件有哪些
功能強大的機器人仿真和離線編程軟件,支持多種機器人品牌,如Fanuc、KUKA、ABB等。它提供了豐富的工具,如3D可視化、碰撞檢測、路徑優化等。 CoppeliaSim (前稱V-R





 工商網監
工商網監
評論