") 二十年來(lái)目標(biāo)檢測(cè)領(lǐng)域的關(guān)鍵技術(shù),思路非常清晰
二十年來(lái)目標(biāo)檢測(cè)領(lǐng)域的關(guān)鍵技術(shù),思路非常清晰
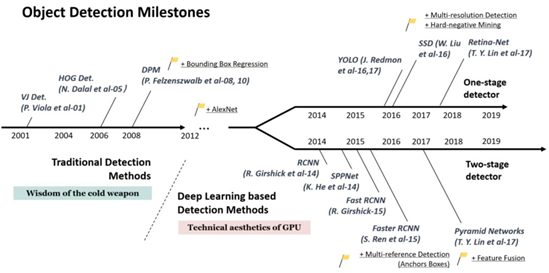
以2014年為分水嶺,作者將過(guò)去二十年的目標(biāo)檢測(cè)發(fā)展進(jìn)程分為兩個(gè)階段:2014年之前的傳統(tǒng)目標(biāo)檢測(cè),以及之后基于深度學(xué)習(xí)的目標(biāo)檢測(cè)。接下來(lái),文章列舉了二十年來(lái)目標(biāo)檢測(cè)領(lǐng)域的關(guān)鍵技術(shù),思路非常清晰。
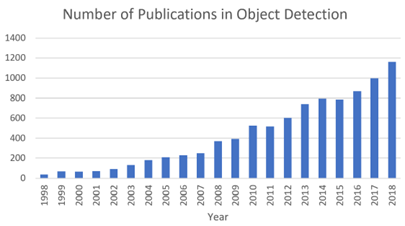
過(guò)去二十年中與 “ 目標(biāo)檢測(cè) ” 相關(guān)的出版物數(shù)量的增長(zhǎng)
二十年
在計(jì)算機(jī)視覺(jué)領(lǐng)域中有幾個(gè)基本的任務(wù):圖像分類[3]、目標(biāo)檢測(cè)[4]、實(shí)例分割[5]及語(yǔ)義分割[6],其中目標(biāo)檢測(cè)作為計(jì)算機(jī)視覺(jué)中最基本的任務(wù)在近年來(lái)引起了廣泛關(guān)注。某種意義上,它在過(guò)去二十年內(nèi)的發(fā)展也是計(jì)算機(jī)視覺(jué)發(fā)展史的縮影。如果我們將今天基于深度學(xué)習(xí)的目標(biāo)檢測(cè)技術(shù)比作一場(chǎng)“熱兵器革命”,那么回顧20年前的技術(shù)時(shí)即可窺探“冷兵器”時(shí)代的智慧。
目標(biāo)檢測(cè)是一項(xiàng)計(jì)算機(jī)視覺(jué)任務(wù)。正如視覺(jué)對(duì)于人的作用一樣,目標(biāo)檢測(cè)旨在解決計(jì)算機(jī)視覺(jué)應(yīng)用中兩個(gè)最基本的問(wèn)題:1. 該物體是什么?2. 該物體在哪里?當(dāng)然,聰明的人可能會(huì)立即想到第三個(gè)問(wèn)題:“該物體在干什么?”這即是更進(jìn)一步的邏輯及認(rèn)知推理,這一點(diǎn)在近年來(lái)的目標(biāo)檢測(cè)技術(shù)中也越來(lái)越被重視。不管怎樣,作為計(jì)算機(jī)視覺(jué)的基本任務(wù),它也是其他計(jì)算機(jī)視覺(jué)任務(wù)的主要成分,如實(shí)例分割、圖像字幕、目標(biāo)跟蹤等。
從應(yīng)用的角度來(lái)看,目標(biāo)檢測(cè)可以被分為兩個(gè)研究主題:“ 通用目標(biāo)檢測(cè)(General Object Detection) ”及“檢測(cè)應(yīng)用(Detection Applications)”,前者旨在探索在統(tǒng)一的框架下檢測(cè)不同類型物體的方法,以模擬人類的視覺(jué)和認(rèn)知;后者是指特定應(yīng)用場(chǎng)景下的檢測(cè),如行人檢測(cè)、人臉檢測(cè)、文本檢測(cè)等。
近年來(lái),隨著深度學(xué)習(xí)技術(shù)[7]的快速發(fā)展,為目標(biāo)檢測(cè)注入了新鮮血液,取得了顯著的突破,也將其推向了一個(gè)前所未有的研究熱點(diǎn)。目前,目標(biāo)檢測(cè)已廣泛應(yīng)用于自動(dòng)駕駛、機(jī)器人視覺(jué)、視頻監(jiān)控等領(lǐng)域。
二十年間的發(fā)展
如下圖所示,以2014年為分水嶺,目標(biāo)檢測(cè)在過(guò)去的二十年中可大致分為兩個(gè)時(shí)期:2014年前的“傳統(tǒng)目標(biāo)檢測(cè)期”及之后的“基于深度學(xué)習(xí)的目標(biāo)檢測(cè)期”。接下來(lái)我們?cè)敿?xì)談?wù)搩蓚€(gè)時(shí)期的發(fā)展。
1、傳統(tǒng)檢測(cè)
早期的目標(biāo)檢測(cè)算法大多是基于手工特征構(gòu)建的。由于當(dāng)時(shí)缺乏有效的圖像表示,人們別無(wú)選擇,只能設(shè)計(jì)復(fù)雜的特征表示及各種加速技術(shù)對(duì)有限的計(jì)算資源物盡其用。
(1) Viola Jones檢測(cè)器
18年前,P. Viola和M. Jones在沒(méi)有任何約束(如膚色分割)的情況下首次實(shí)現(xiàn)了人臉的實(shí)時(shí)檢測(cè)[8][9]。他們所設(shè)計(jì)的檢測(cè)器在一臺(tái)配備700MHz Pentium III CPU的電腦上運(yùn)行,在保持同等檢測(cè)精度的條件下的運(yùn)算速度是其他算法的數(shù)十甚至數(shù)百倍。這種檢測(cè)算法以共同作者的名字命名為“Viola-Jones (VJ) 檢測(cè)器”以紀(jì)念他們的重大貢獻(xiàn)。
VJ檢測(cè)器采用最直接的檢測(cè)方法,即滑動(dòng)窗口(slide window):查看一張圖像中所有可能的窗口尺寸和位置并判斷是否有窗口包含人臉。這一過(guò)程雖然聽(tīng)上去簡(jiǎn)單,但它背后所需的計(jì)算量遠(yuǎn)遠(yuǎn)超出了當(dāng)時(shí)計(jì)算機(jī)的算力。VJ檢測(cè)器結(jié)合了 “ 積分圖像 ”、“ 特征選擇 ” 和 “ 檢測(cè)級(jí)聯(lián) ” 三種重要技術(shù),大大提高了檢測(cè)速度。
1)積分圖像:這是一種計(jì)算方法,以加快盒濾波或卷積過(guò)程。與當(dāng)時(shí)的其他目標(biāo)檢測(cè)算法一樣[10],在VJ檢測(cè)器中使用Haar小波作為圖像的特征表示。積分圖像使得VJ檢測(cè)器中每個(gè)窗口的計(jì)算復(fù)雜度與其窗口大小無(wú)關(guān)。
2)特征選擇:作者沒(méi)有使用一組手動(dòng)選擇的Haar基過(guò)濾器,而是使用Adaboost算法從一組巨大的隨機(jī)特征池 (大約18萬(wàn)維) 中選擇一組對(duì)人臉檢測(cè)最有幫助的小特征。
3)檢測(cè)級(jí)聯(lián):在VJ檢測(cè)器中引入了一個(gè)多級(jí)檢測(cè)范例 ( 又稱“檢測(cè)級(jí)聯(lián)”,detection cascades ),通過(guò)減少對(duì)背景窗口的計(jì)算,而增加對(duì)人臉目標(biāo)的計(jì)算,從而減少了計(jì)算開(kāi)銷。
(2) HOG 檢測(cè)器
方向梯度直方圖(HOG)特征描述器最初是由N. Dalal和B.Triggs在2005年提出的[11]。HOG對(duì)當(dāng)時(shí)的尺度不變特征變換(scale-invariant feature transform)和形狀語(yǔ)境(shape contexts)做出重要改進(jìn)。為了平衡特征不變性 ( 包括平移、尺度、光照等 ) 和非線性 ( 區(qū)分不同對(duì)象類別 ),HOG描述器被設(shè)計(jì)為在密集的均勻間隔單元網(wǎng)格(稱為一個(gè)“區(qū)塊”)上計(jì)算,并使用重疊局部對(duì)比度歸一化方法來(lái)提高精度。雖然HOG可以用來(lái)檢測(cè)各種對(duì)象類,但它的主要目標(biāo)是行人檢測(cè)問(wèn)題。如若要檢測(cè)不同大小的對(duì)象,則要讓HOG檢測(cè)器在保持檢測(cè)窗口大小不變的情況下,對(duì)輸入圖像進(jìn)行多次重設(shè)尺寸(rescale)。這么多年來(lái),HOG檢測(cè)器一直是許多目標(biāo)檢測(cè)器和各種計(jì)算機(jī)視覺(jué)應(yīng)用的重要基礎(chǔ)。
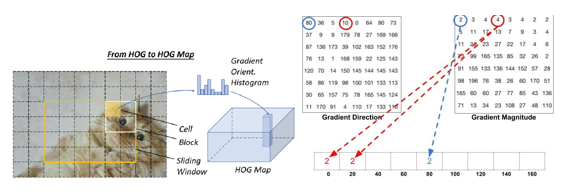
方向梯度直方圖(HOG),計(jì)算出每個(gè)像素朝四周的梯度方向和梯度強(qiáng)度,并統(tǒng)計(jì)形成梯度直方圖
(3) 基于可變形部件的模型(DPM)
DPM作為voco -07、-08、-09屆檢測(cè)挑戰(zhàn)賽的優(yōu)勝者,它曾是傳統(tǒng)目標(biāo)檢測(cè)方法的巔峰。DPM最初是由P. Felzenszwalb提出的[12],于2008年作為HOG檢測(cè)器的擴(kuò)展,之后R. Girshick進(jìn)行了各種改進(jìn)[13][14]。
DPM遵循“分而治之”的檢測(cè)思想,訓(xùn)練可以簡(jiǎn)單地看作是學(xué)習(xí)一種正確的分解對(duì)象的方法,推理可以看作是對(duì)不同對(duì)象部件的檢測(cè)的集合。例如,檢測(cè)“汽車”的問(wèn)題可以看作是檢測(cè)它的窗口、車身和車輪。工作的這一部分,也就是“star model”由P.Felzenszwalb等人完成。后來(lái),R. Girshick進(jìn)一步將star model擴(kuò)展到 “ 混合模型 ”,以處理更顯著變化下的現(xiàn)實(shí)世界中的物體。
一個(gè)典型的DPM檢測(cè)器由一個(gè)根過(guò)濾器(root-filter)和一些零件濾波器(part-filters)組成。該方法不需要手動(dòng)設(shè)定零件濾波器的配置(如尺寸和位置),而是在開(kāi)發(fā)了一種弱監(jiān)督學(xué)習(xí)方法并使用到了DPM中,所有零件濾波器的配置都可以作為潛在變量自動(dòng)學(xué)習(xí)。R. Girshick將這個(gè)過(guò)程進(jìn)一步表述為一個(gè)多實(shí)例學(xué)習(xí)的特殊案例,同時(shí)還應(yīng)用了“困難負(fù)樣本挖掘(hard-negative mining)”、“邊界框回歸”、“語(yǔ)境啟動(dòng)”等重要技術(shù)以提高檢測(cè)精度。而為了加快檢測(cè)速度,Girshick開(kāi)發(fā)了一種技術(shù),將檢測(cè)模型“ 編譯 ”成一個(gè)更快的模型,實(shí)現(xiàn)了級(jí)聯(lián)結(jié)構(gòu),在不犧牲任何精度的情況下實(shí)現(xiàn)了超過(guò)10倍的加速。
雖然今天的目標(biāo)探測(cè)器在檢測(cè)精度方面已經(jīng)遠(yuǎn)遠(yuǎn)超過(guò)了DPM,但仍然受到DPM的許多有價(jià)值的見(jiàn)解的影響,如混合模型、困難負(fù)樣本挖掘、邊界框回歸等。2010年,P. Felzenszwalb和R. Girshick被授予PASCAL VOC的 “終身成就獎(jiǎng)”。
2、基于卷積神經(jīng)網(wǎng)絡(luò)的雙級(jí)檢測(cè)器
隨著手動(dòng)選取特征技術(shù)的性能趨于飽和,目標(biāo)檢測(cè)在2010年之后達(dá)到了一個(gè)平穩(wěn)的發(fā)展期。2012年,卷積神經(jīng)網(wǎng)絡(luò)在世界范圍內(nèi)重新煥發(fā)生機(jī)[15]。由于深卷積網(wǎng)絡(luò)能夠?qū)W習(xí)圖像的魯棒性和高層次特征表示,一個(gè)自然而然的問(wèn)題是:我們能否將其應(yīng)用到目標(biāo)檢測(cè)中?R. Girshick等人在2014年率先打破僵局,提出了具有CNN特征的區(qū)域(RCNN)用于目標(biāo)檢測(cè)[16]。從那時(shí)起,目標(biāo)檢測(cè)開(kāi)始以前所未有的速度發(fā)展。在深度學(xué)習(xí)時(shí)代,目標(biāo)檢測(cè)可以分為兩類:“雙級(jí)檢測(cè)(two-stage detection)” 和 “單級(jí)檢測(cè)(one-stage detection)”,前者將檢測(cè)框定為一個(gè)“從粗到細(xì) ”的過(guò)程,而后者將其定義為“一步到位”。
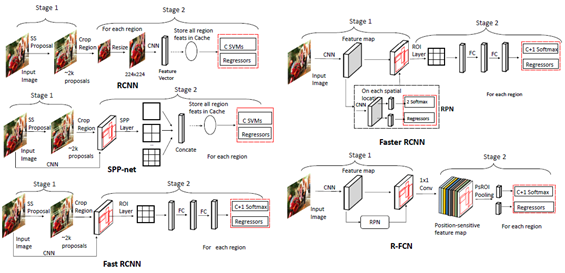
雙級(jí)檢測(cè)的發(fā)展及各類檢測(cè)器的結(jié)構(gòu)[2]
(1) RCNN
RCNN[17]的思路很簡(jiǎn)單:它首先通過(guò)選擇性搜索來(lái)提取一組對(duì)象作為“提案(proposal)”并當(dāng)做對(duì)象的候選框。然后將每個(gè)提案重新調(diào)整成一個(gè)固定大小的圖像,再輸入到一個(gè)在ImageNet上訓(xùn)練得到的CNN模型(如AlexNet) 來(lái)提取特征。最后,利用線性SVM分類器對(duì)每個(gè)區(qū)域內(nèi)的目標(biāo)進(jìn)行預(yù)測(cè),識(shí)別目標(biāo)類別。RCNN在VOC07測(cè)試集上有明顯的性能提升,平均精準(zhǔn)度 (mean Average Precision,mAP) 從33.7%(DPM-v5) 大幅提高到58.5%。
雖然RCNN已經(jīng)取得了很大的進(jìn)步,但它的缺點(diǎn)是顯而易見(jiàn)的:需要在大量重疊的提案上進(jìn)行冗余的特征計(jì)算 (一張圖片超過(guò)2000個(gè)框),導(dǎo)致檢測(cè)速度極慢(使用GPU時(shí)每張圖片耗時(shí)14秒)。同年晚些時(shí)候,有人提出了SPPNet并克服了這個(gè)問(wèn)題。
(2) SPPNet
2014年,K. He等人提出了空間金字塔池化網(wǎng)絡(luò)( Spatial Pyramid Pooling Networks,SPPNet)[18]。以前的CNN模型需要固定大小的輸入,例如AlexNet需要224x224圖像。SPPNet的主要貢獻(xiàn)是引入了空間金字塔池化(SPP)層,它使CNN能夠生成固定長(zhǎng)度的表示,而不需要重新調(diào)節(jié)有意義圖像的尺寸。利用SPPNet進(jìn)行目標(biāo)檢測(cè)時(shí),只對(duì)整個(gè)圖像進(jìn)行一次特征映射計(jì)算,然后生成任意區(qū)域的定長(zhǎng)表示以訓(xùn)練檢測(cè)器,避免了卷積特征的重復(fù)計(jì)算。SPPNet的速度是R-CNN的20多倍,并且沒(méi)有犧牲任何檢測(cè)精度(VOC07 mAP=59.2%)。
SPPNet雖然有效地提高了檢測(cè)速度,但仍然存在一些不足:第一,訓(xùn)練仍然是多階段的,第二,SPPNet只對(duì)其全連接層進(jìn)行微調(diào),而忽略了之前的所有層。而次年晚些時(shí)候出現(xiàn)Fast RCNN并解決了這些問(wèn)題。
(3)Fast RCNN
2015年,R. Girshick提出了Fast RCNN檢測(cè)器[19],這是對(duì)R-CNN和SPPNet的進(jìn)一步改進(jìn)。Fast RCNN使我們能夠在相同的網(wǎng)絡(luò)配置下同時(shí)訓(xùn)練檢測(cè)器和邊界框回歸器。在VOC07數(shù)據(jù)集上,F(xiàn)ast RCNN將mAP從58.5%( RCNN)提高到70.0%,檢測(cè)速度是R-CNN的200多倍。
雖然Fast-RCNN成功地融合了R-CNN和SPPNet的優(yōu)點(diǎn),但其檢測(cè)速度仍然受到提案檢測(cè)的限制。然后,一個(gè)問(wèn)題自然而然地出現(xiàn)了:“ 我們能用CNN模型生成對(duì)象提案嗎? ” 之后的Faster R-CNN解決了這個(gè)問(wèn)題。
(4) Faster RCNN
2015年,S. Ren等人提出了Faster RCNN檢測(cè)器[20],在Fast RCNN之后不久。Faster RCNN 是第一個(gè)端到端的,也是第一個(gè)接近實(shí)時(shí)的深度學(xué)習(xí)檢測(cè)器(COCO mAP@.5=42.7%,COCO mAP@[.5,.95]=21.9%, VOC07 mAP=73.2%,VOC12 mAP=70.4%)。Faster RCNN的主要貢獻(xiàn)是引入了區(qū)域提案網(wǎng)絡(luò) (RPN)從而允許幾乎所有的cost-free的區(qū)域提案。從RCNN到Faster RCNN,一個(gè)目標(biāo)檢測(cè)系統(tǒng)中的大部分獨(dú)立塊,如提案檢測(cè)、特征提取、邊界框回歸等,都已經(jīng)逐漸集成到一個(gè)統(tǒng)一的端到端學(xué)習(xí)框架中。
雖然Faster RCNN突破了Fast RCNN的速度瓶頸,但是在后續(xù)的檢測(cè)階段仍然存在計(jì)算冗余。后來(lái)提出了多種改進(jìn)方案,包括RFCN和 Light head RCNN。
(5) Feature Pyramid Networks(FPN)
2017年,T.-Y.Lin等人基于Faster RCNN提出了特征金字塔網(wǎng)絡(luò)(FPN)[21]。在FPN之前,大多數(shù)基于深度學(xué)習(xí)的檢測(cè)器只在網(wǎng)絡(luò)的頂層進(jìn)行檢測(cè)。雖然CNN較深層的特征有利于分類識(shí)別,但不利于對(duì)象的定位。為此,開(kāi)發(fā)了具有橫向連接的自頂向下體系結(jié)構(gòu),用于在所有級(jí)別構(gòu)建高級(jí)語(yǔ)義。由于CNN通過(guò)它的正向傳播,自然形成了一個(gè)特征金字塔,F(xiàn)PN在檢測(cè)各種尺度的目標(biāo)方面顯示出了巨大的進(jìn)步。在基礎(chǔ)的Faster RCNN系統(tǒng)中使用FPN骨架可在無(wú)任何修飾的條件下在MS-COCO數(shù)據(jù)集上以單模型實(shí)現(xiàn)state-of-the-art 的效果(COCO mAP@.5=59.1%,COCO mAP@[.5,.95]= 36.2%)。FPN現(xiàn)在已經(jīng)成為許多最新探測(cè)器的基本組成部分。
3、基于卷積神經(jīng)網(wǎng)絡(luò)的單級(jí)檢測(cè)器
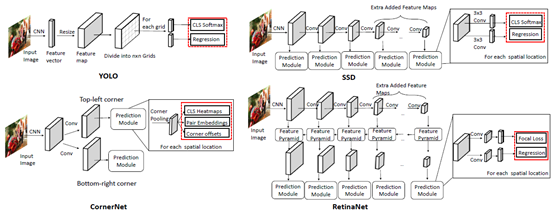
單階段檢測(cè)的發(fā)展及各類檢測(cè)器的結(jié)構(gòu)[2]
(1) You Only Look Once (YOLO)
YOLO由R. Joseph等人于2015年提出[22]。它是深度學(xué)習(xí)時(shí)代的第一個(gè)單級(jí)檢測(cè)器。YOLO非常快:YOLO的一個(gè)快速版本運(yùn)行速度為155fps, VOC07 mAP=52.7%,而它的增強(qiáng)版本運(yùn)行速度為45fps, VOC07 mAP=63.4%, VOC12 mAP=57.9%。YOLO是“ You Only Look Once ” 的縮寫。從它的名字可以看出,作者完全拋棄了之前的“提案檢測(cè)+驗(yàn)證”的檢測(cè)范式。相反,它遵循一個(gè)完全不同的設(shè)計(jì)思路:將單個(gè)神經(jīng)網(wǎng)絡(luò)應(yīng)用于整個(gè)圖像。該網(wǎng)絡(luò)將圖像分割成多個(gè)區(qū)域,同時(shí)預(yù)測(cè)每個(gè)區(qū)域的邊界框和概率。后來(lái)R. Joseph在 YOLO 的基礎(chǔ)上進(jìn)行了一系列改進(jìn),其中包括以路徑聚合網(wǎng)絡(luò)(Path aggregation Network, PAN)取代FPN,定義新的損失函數(shù)等,陸續(xù)提出了其 v2、v3及v4版本(截止本文的2020年7月,Ultralytics發(fā)布了“YOLO v5”,但并沒(méi)有得到官方承認(rèn)),在保持高檢測(cè)速度的同時(shí)進(jìn)一步提高了檢測(cè)精度。
必須指出的是,盡管與雙級(jí)探測(cè)器相比YOLO的探測(cè)速度有了很大的提高,但它的定位精度有所下降,特別是對(duì)于一些小目標(biāo)而言。YOLO的后續(xù)版本及在它之后提出的SSD更關(guān)注這個(gè)問(wèn)題。
(2) Single Shot MultiBox Detector (SSD)
SSD由W. Liu等人于2015年提出[23]。這是深度學(xué)習(xí)時(shí)代的第二款單級(jí)探測(cè)器。SSD的主要貢獻(xiàn)是引入了多參考和多分辨率檢測(cè)技術(shù),這大大提高了單級(jí)檢測(cè)器的檢測(cè)精度,特別是對(duì)于一些小目標(biāo)。SSD在檢測(cè)速度和準(zhǔn)確度上都有優(yōu)勢(shì)(VOC07 mAP=76.8%,VOC12 mAP=74.9%, COCO mAP@.5=46.5%,mAP@[.5,.95]=26.8%,快速版本運(yùn)行速度為59fps) 。SSD與其他的檢測(cè)器的主要區(qū)別在于,前者在網(wǎng)絡(luò)的不同層檢測(cè)不同尺度的對(duì)象,而后者僅在其頂層運(yùn)行檢測(cè)。
(3) RetinaNet
單級(jí)檢測(cè)器有速度快、結(jié)構(gòu)簡(jiǎn)單的優(yōu)點(diǎn),但在精度上多年來(lái)一直落后于雙級(jí)檢測(cè)器。T.-Y.Lin等人發(fā)現(xiàn)了背后的原因,并在2017年提出了RetinaNet[24]。他們的觀點(diǎn)為精度不高的原因是在密集探測(cè)器訓(xùn)練過(guò)程中極端的前景-背景階層不平衡(the extreme foreground-background class imbalance)現(xiàn)象。為此,他們?cè)赗etinaNet中引入了一個(gè)新的損失函數(shù) “ 焦點(diǎn)損失(focal loss)”,通過(guò)對(duì)標(biāo)準(zhǔn)交叉熵?fù)p失的重構(gòu),使檢測(cè)器在訓(xùn)練過(guò)程中更加關(guān)注難分類的樣本。焦損耗使得單級(jí)檢測(cè)器在保持很高的檢測(cè)速度的同時(shí),可以達(dá)到與雙級(jí)檢測(cè)器相當(dāng)?shù)木取?COCO mAP@.5=59.1%,mAP@[.5, .95]=39.1% )。
-
視頻監(jiān)控
+關(guān)注
關(guān)注
17文章
1723瀏覽量
65930 -
目標(biāo)檢測(cè)
+關(guān)注
關(guān)注
0文章
223瀏覽量
15949 -
計(jì)算機(jī)視覺(jué)
+關(guān)注
關(guān)注
9文章
1706瀏覽量
46629
原文標(biāo)題:綜述:目標(biāo)檢測(cè)二十年
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
電機(jī)系統(tǒng)節(jié)能關(guān)鍵技術(shù)及展望
NVIDIA Research在多個(gè)領(lǐng)域不斷取得突破
淺談華為通信大模型的關(guān)鍵技術(shù)
云計(jì)算HPC軟件關(guān)鍵技術(shù)
涂鴉智能HEMS實(shí)踐案例成功入選UNGC“二十年二十佳企業(yè)可持續(xù)發(fā)展案例”報(bào)告
強(qiáng)達(dá)電路深耕PCB行業(yè)二十年,榮獲高新技術(shù)企業(yè)等多項(xiàng)殊榮
探索光耦:高速光耦——醫(yī)療器械領(lǐng)域的關(guān)鍵技術(shù)與創(chuàng)新力量






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論