") Vivado 工具已更新至2020.1.1 v1.30
Vivado 工具已更新至2020.1.1 v1.30

描述
在《Zynq UltraScale+ MPSoC 數(shù)據(jù)手冊》(DS925) 中,XAZU7EV-1Q 器件與 XAZU11EG-1Q 器件的最低量產(chǎn)軟件和速度規(guī)格已從 Vivado 工具 2019.1.1 v1.26 更新至 Vivado 工具 2020.1.1 v1.30。
汽車級(jí) Zynq UltraScale+ 器件的速度文件參數(shù)在 2020.1.1 版中已更新,糾正了極端情況下的靜態(tài)時(shí)序問題。
更新包括糾正了 XAZU7EV-1Q 器件和 XAZU11EG-1Q 器件的互連延遲以及速度/溫度等級(jí)。
解決方案
對于 XAZU7EV-1Q 器件和 XAZU11EG-1Q 器件以及速度/溫度等級(jí)設(shè)計(jì),請使用 Vivado Design Suite 2020.1.1 或更高版本。
對于使用 Vivado 工具 2019.1.1 - 2020.1 構(gòu)建并已部署的 XAZU7EV-1Q 器件和 XAZU11EG-1Q 器件以及速度/溫度等級(jí)設(shè)計(jì),賽靈思認(rèn)為,根據(jù)賽靈思器件特性,在 Vivado 工具 2019.1.1 - 2020.1 中滿足時(shí)序約束的大部分設(shè)計(jì)都具有足夠的裕度以供在量產(chǎn)器件中正常運(yùn)行。
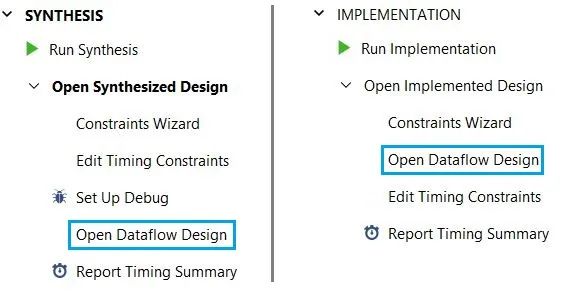
您可通過以下方式使用 Vivado 工具 2020.1.1 或更高版本來評(píng)估時(shí)序問題對于您使用 Vivado 工具 2019.1.1 - 2020.1 所構(gòu)建的設(shè)計(jì)產(chǎn)生的影響:在 Vivado 工具 2020.1.1 或更高版本中,對已完全實(shí)現(xiàn)的設(shè)計(jì)檢查點(diǎn) (.dcp) 文件重新運(yùn)行時(shí)序分析。
評(píng)估步驟:
如果您的比特流是使用 Vivado 工程模式生成的,則必須找到已完全實(shí)現(xiàn)的 .dcp 文件。
通常,已完全實(shí)現(xiàn)的 .dcp 文件應(yīng)位于如下某一路徑中,具體取決于布線后是否已啟用 phys_opt_design。
project_myDesign.runs/impl_1/myDesign_routed.dcp
project_myDesign.runs/impl_1/myDesign_postroute_physopt.dcp
例如,如果已完全實(shí)現(xiàn)的 .dcp 文件為 myDesign_routed.dcp,則上述命令應(yīng)如下所示:
#Open the final dcp for the finished design open_checkpoint project_myDesign.runs/impl_1/myDesign_routed.dcp #Report timing report_timing_summary -file myDesign_timing_summary_routed.rpt
如果出現(xiàn)時(shí)序違例,則必須在 Vivado 工具 2020.1.1 或更高版本中對設(shè)計(jì)進(jìn)行重新編譯以達(dá)成時(shí)序收斂。
用戶可以重新運(yùn)行 route_design 步驟,或者也可以重新運(yùn)行完整的實(shí)現(xiàn)過程。
原文標(biāo)題:面向 XAZU7EV-1Q 器件和 XAZU11EG-1Q 器件的 Vivado 2020.1.1 量產(chǎn)速度文件更新
文章出處:【微信公眾號(hào):FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
Vivado
+關(guān)注
關(guān)注
19文章
835瀏覽量
68824
原文標(biāo)題:面向 XAZU7EV-1Q 器件和 XAZU11EG-1Q 器件的 Vivado 2020.1.1 量產(chǎn)速度文件更新
文章出處:【微信號(hào):zhuyandz,微信公眾號(hào):FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
IAR發(fā)布RISC-V開發(fā)工具鏈v3.40.1版本
IAR開發(fā)平臺(tái)升級(jí)Arm和RISC-V開發(fā)工具鏈,加速現(xiàn)代嵌入式系統(tǒng)開發(fā)
Vivado 2018.3軟件的使用教程

一文詳解Vivado時(shí)序約束
已安裝OpenVINO?工具套件,無法運(yùn)行是怎么回事?
MES工具更新信息 01/2025

hyper v驅(qū)動(dòng),Hyper-V驅(qū)動(dòng)安裝:驅(qū)動(dòng)更新與優(yōu)化
hyper v 工具,hyper v 工具有哪些呢
MES工具更新信息 04/2024
希姆計(jì)算的RISC-V矩陣擴(kuò)展開源項(xiàng)目已升級(jí)至0.5版本,支持向量+矩陣的實(shí)現(xiàn)

JESD79-5C_v1.30-2024 內(nèi)存技術(shù)規(guī)范
Vivado使用小技巧

實(shí)時(shí)網(wǎng)絡(luò)的仿真和配置工具RTaW Pegase v4.6版本更新






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論