 Xilinx Linux 如何理解V4L2的管道驅動程序
Xilinx Linux 如何理解V4L2的管道驅動程序
概述
Xilinx提供了完整的V4L2的驅動程序,Xilinx V4L2 driver。處于最頂層的驅動程序是V4L2框架的視頻管道(Video pipeline)驅動程序,也叫橋驅動程序(bridge driver),主要代碼在文件xilinx-vipp.c中。在V4L2框架中,整個視頻管道(Video pipeline)可以通過媒體設備(/dev/media)配置,流媒體可以通過視頻設備(/dev/video)控制。這兩種設備,都是在視頻管道(Video pipeline)驅動程序里創建的。所以,理解V4L2的管道(pipeline)驅動程序是理解Xilinx所有Video IP 在Linux下工作情況的基礎。
3. 文件
3.1. C文件
Xilinx的V4L2的管道(pipeline)驅動程序在下面四個文件中。
1. drivers/media/platform/xilinx/xilinx-vipp.c
2. drivers/media/platform/xilinx/xilinx-vipp.h
3. drivers/media/platform/xilinx/xilinx-dma.c
4. drivers/media/platform/xilinx/xilinx-dma.h
3.2.設備樹(devicetree)
設備樹(devicetree)里含有整個視頻管道(video pipeline)的配置,對應的文檔在Documentation/devicetree/bindings/media/xilinx/xlnx,video.txt。
下面是一個設備樹(devicetree)的例子。
axi_video_cap {
compatible = "xlnx,axi-video";
dmas = , ;
dma-names = "port0", "port1";
ports {
#address-cells = ;
#size-cells = ;
port@0 {
reg = ;
direction = "input";
vcap0_in0: endpoint {
remote-endpoint = ;
};
};
port@1 {
reg = ;
direction = "input";
vcap0_in1: endpoint {
remote-endpoint = ;
};
};
};
};
3.3. 函數調用關系圖
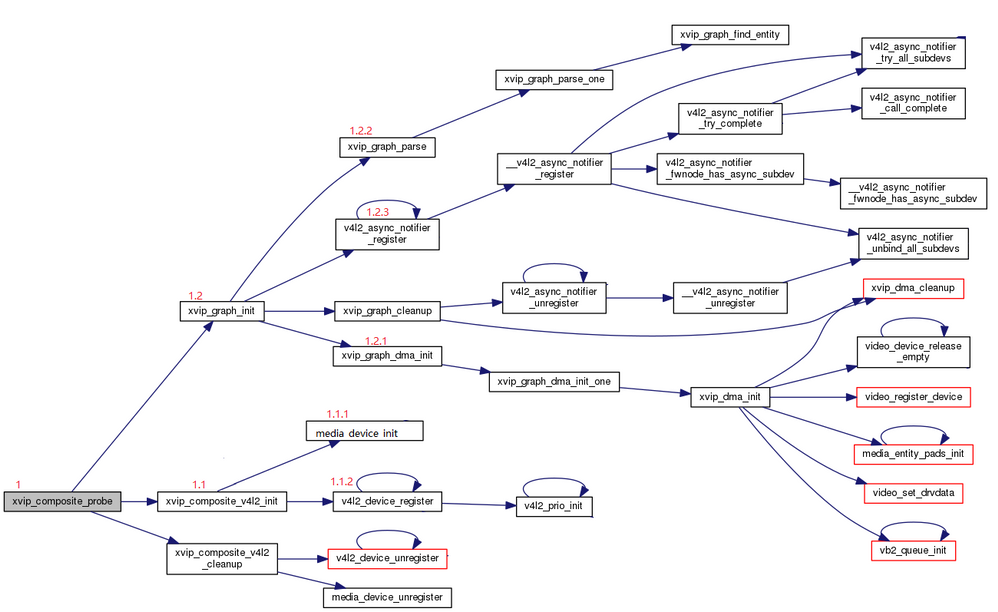
xvipp 函數調用關系圖
4.主要函數
4.1. 函數xvip_composite_probe()
函數xvip_composite_probe是整個驅動的入口,主要工作是初始化驅動的數據結構xvip_composite_device里的通用數據,包括lock、list(entities和dmas),再調用了xvip_composite_v4l2_init()和xvip_graph_init(),最后調用platform_set_drvdata設置平臺設備platform_device里的當前設備的數據指針。
4.2. 函數xvip_composite_v4l2_init()
函數xvip_composite_v4l2_init做的事情比較簡單,只是初始化了struct media_device,設置了設備版本和model名稱、dev/mdev指針,就調用了v4l2_device_register()注冊V4L2設備。
xvip_composite_v4l2_init的關鍵代碼如下:
xdev->media_dev.dev = xdev->dev;
strlcpy(xdev->media_dev.model, "Xilinx Video Composite Device",
sizeof(xdev->media_dev.model));
xdev->media_dev.hw_revision = 0;
media_device_init(&xdev->media_dev);
xdev->v4l2_dev.mdev = &xdev->media_dev;
ret = v4l2_device_register(xdev->dev, &xdev->v4l2_dev);
4.3. 函數xvip_graph_init
函數xvip_graph_init是最重要的函數,函數調用層次也最深。它首先調用xvip_graph_dma_init根據設備樹(devicetree)里的port信息初始化DMA通道,創建一個DMA的列表;再調用xvip_graph_parse在設備樹(devicetree)里分析子設備節點,根據設備樹里"remote-endpoint"屬性創建一個Entity的列表;最后調用v4l2_async_notifier_register注冊異步處理函數。系統發現各個子設備(subdev)后,調用異步處理函數xvip_graph_notify_bound獲取子設備信息。所有子設備(subdev)都被發現后,調用xvip_graph_notify_complete,為每個entity創建Link和V4L2子設備,并注冊media設備。
xvip_graph_init的關鍵代碼如下:
/* Init the DMA channels. */
ret = xvip_graph_dma_init(xdev);
/* Parse the graph to extract a list of subdevice DT nodes. */
ret = xvip_graph_parse(xdev);
/* Register the subdevices notifier. */
num_subdevs = xdev->num_subdevs;
subdevs = devm_kcalloc(xdev->dev, num_subdevs, sizeof(*subdevs), GFP_KERNEL);
xdev->notifier.subdevs = subdevs;
xdev->notifier.num_subdevs = num_subdevs;
xdev->notifier.ops = &xvip_graph_notify_ops;
ret = v4l2_async_notifier_register(&xdev->v4l2_dev, &xdev->notifier);
4.4. 函數xvip_graph_dma_init
xvip_graph_dma_init()自身比較簡單,先找到第一個"ports"子節點,再找其中的所有"port"節點,并為每個"port"子節點執行xvip_graph_dma_init_one(),從而將每個"port"子節點對應的DMA添加到鏈表dmas中。
xvip_graph_dma_init的關鍵代碼如下:
ports = of_get_child_by_name(xdev->dev->of_node, "ports");
for_each_child_of_node(ports, port) {
ret = xvip_graph_dma_init_one(xdev, port);
}
4.5. 函數xvip_graph_dma_init_one
xvip_graph_dma_init_one()根據設備樹(devicetree)的"port"子節點的配置,找到DMA,并添加到鏈表"xdev->dmas"中。
xvip_graph_dma_init_one先讀取"port"子節點的屬性"direction"和"reg"屬性。Devicetre的"port"節點中,要含有屬性“direction”和"reg"屬性;如果沒有屬性“direction”,會返回錯誤;如果沒有"reg"屬性,代碼會繼續,但是功能會出錯。屬性"direction"的值是"input"或者"output"。
xvip_graph_dma_init_one還為每個port分配struct xvip_dma,再執行xvip_dma_init()。
接下來,xvip_graph_dma_init_one把struct xvip_dma加入到隊列xdev->dmas。
xvip_graph_dma_init_one還根據"direction"的值是"input"或者"output",以及xvip_is_mplane的設置,選擇buffer類型。
xvip_graph_dma_init_one的關鍵代碼如下:
// Read direction and reg properties
ret = of_property_read_string(node, "direction", &direction);
of_property_read_u32(node, "reg", &index);
dma = devm_kzalloc(xdev->dev, sizeof(*dma), GFP_KERNEL);
ret = xvip_dma_init(xdev, dma, type, index);
list_add_tail(&dma->list, &xdev->dmas);
4.6. 函數xvip_dma_init
xvip_dma_init是核心的函數,完成了最關鍵的任務:初始化buffer隊列、申請DMA設備、注冊Video設備。
函數xvip_dma_init()先初始化struct xvip_dma的數據成員,包括dma->lock、dma->pipe.lock、dma->queued_bufs、dma->queued_lock;再根據buffer類型,初始化v4l2_format里的像數點格式,struct v4l2_pix_format pix 或者struct v4l2_pix_format_mplane pix_mp。接下來設置pad.flags為MEDIA_PAD_FL_SINK或者MEDIA_PAD_FL_SOURCE,調用media_entity_pads_init初始化初始化media entity。
函數xvip_dma_init()然后繼續初始化video_device的各種成員和操作函數,包括fops、v4l2_dev、queue、vfl_type、vfl_dir、lock、和ioctl_ops。video_device的fops被設置為xvip_dma_fops,ioctl_ops被設置為xvip_dma_ioctl_ops。
函數xvip_dma_init()再接著初始化buffer隊列struct vb2_queue queue,其中ops被設置為xvip_dma_queue_qops,mem_ops被設置為vb2_dma_contig_memops,執行vb2_queue_init。
函數xvip_dma_init()再接著執行dma_request_chan申請DMA設備,這是一個復雜和核心的函數。dma_request_chan()的第二個參數是DMA通道的名稱,名字是格式是"port%u",比如"port0",也就是設備樹的屬性"dma-names"里的字符串。其中of_dma_request_slave_channel()調用的of_find_property(np, "dmas", NULL),通過屬性"dmas",取得了dma。of_property_count_strings()計算屬性"dma-names"里的字符串個數,也就是DMA的個數。然后根據DMA的個數,為每一個DMA執行of_dma_match_channel()。of_dma_match_channel (dev->of_node, "port%u", )取出"dma-names"的字符串,再和"port%u"對比,這是檢查名字是否對應,如果一致,就用對應的DMA,取得struct of_phandle_args dma_spec,再把struct of_phandle_args dma_spec轉換為struct of_dma *ofdma。of_dma_xlate接下來轉換為struct dma_chan。of_dma_request_slave_channel使用了字符串"dmas"。of_dma_match_channel()使用了字符串"dmas"和"dma-names"。所以Xilinx-vipp.c實現的"xlnx,video"設備的設備樹里的"dmas"和"dma-names","port0"是必須有的固定字符串,不能更改;只有dmas后面的DMA phandle才可以更改。
函數xvip_dma_init()最后執行video_register_device注冊Video設備。
4.7. 函數xvip_graph_parse
函數xvip_graph_parse先調用xvip_graph_parse_one,找到直接的remote_port;然后再為每一個找到的remote_port執行一次xvip_graph_parse_one。
4.8. 函數xvip_graph_parse_one
xvip_graph_parse_one()里先調用of_graph_get_next_endpoint(node, ep)取得下一個endpoint,然后再調用of_graph_get_remote_port_parent(ep) 得到remote_port的父節點。of_graph_get_next_endpoint(node, ep)會先嘗試找子節點ports,再找到子節點port,然后再在子節點port里找endpoint;讀取路徑是 { ports { port {endpoint } } },其中ports是可選的。endpoint是port的子節點,不管其內部的屬性名稱,所以也可以用屬性名稱remote-endpoint。of_graph_get_remote_port_parent(ep)通過調用of_graph_get_remote_endpoint()得到remote_port,再調用of_graph_get_port_parent()得到父節點。of_graph_get_remote_endpoint()里讀取了設備樹里的"remote-endpoint"屬性。
xvip_graph_parse_one()再調用xvip_graph_find_entity(),在xdev->entities里檢查是否已經包含對應的entity,如果已經包含,則跳過后續處理;如果沒沒有,則找到的remote_port的父節點,存放到鏈表xdev->entities,并執行操作xdev->num_subdevs++。
最后xdev->entities里包含了所有entity。后來xvip_graph_notify_complet會根據xdev->entities,為每個entity創建一個設備。
4.9. 函數xvip_graph_notify_bound
系統發現子設備(subdev)后,調用異步處理函數xvip_graph_notify_bound獲取子設備信息。xvip_graph_notify_bound根據設備樹節點,匹配實體(entity)和子設備(subdev);匹配成功后,再把子設備(subdev)的指針保存到實體(entity)。
xvip_graph_notify_bound的關鍵代碼如下:
entity->entity = &subdev->entity;
entity->subdev = subdev;
4.10. 函數xvip_graph_notify_complete
系統所有子設備(subdev)都被發現后,Linux會調用xvip_graph_notify_complete。xvip_graph_notify_complete調用xvip_graph_build_one為每個entity創建Link;調用xvip_graph_build_dma做Create links for DMA channels;并為每個實體(entity)注冊V4L2子設備v4l2_device_register_subdev_nodes ;最后調用media_device_register注冊media設備。
4.11. 函數xvip_graph_build_one
函數xvip_graph_build_dma在每個entity及其遠端模塊之間創建Link。
函數xvip_graph_build_one先調用函數of_graph_get_next_endpoint從設備的設備樹里找到下一個endpoint(struct device_node)。與之前描述一樣,of_graph_get_next_endpoint的讀取路徑是 { ports { port {endpoint} } },endpoint是port的子節點,不管其內部的屬性名稱,所以也可以用屬性名稱remote-endpoint。函數xvip_graph_build_dma接著調用v4l2_fwnode_parse_link,得到對應的link(struct v4l2_fwnode_link)。接著根據link中的端口號(local_port)取得pad信息,判斷出是否是目的端(sink)端口;如果是目的端(sink)端口,則忽略。另外還忽略DMA,它由xvip_graph_build_dma處理。接下來再調用函數xvip_graph_find_entity,根據link中的遠端節點(remote_node),得到遠端的entity。最后調用media_create_pad_link,當前entity作為源端(source),遠端entity作為目的端(sink)的media_entity和media_pad,創建媒體pad的鏈接(link)
4.12. 函數xvip_graph_build_dma
函數xvip_graph_build_dma為DMA模塊及其遠端模塊之間創建Link。
函數xvip_graph_build_dma先調用函數of_graph_get_next_endpoint從設備的設備樹里找到下一個endpoint(struct device_node)。函數xvip_graph_build_dma接著調用v4l2_fwnode_parse_link,得到對應的link(struct v4l2_fwnode_link),根據link中的端口號(local_port),找到對應的DMA(struct xvip_dma)。接下來再調用函數xvip_graph_find_entity,根據link中的遠端節點(remote_node),得到遠端的entity。然后設置源端(source)/目的端(sink)的media_entity和media_pad,最后調用media_create_pad_link創建媒體pad的鏈接(link)。
4.13. 函數xvip_graph_find_dma
函數xvip_graph_build_dma根據指定的port號,在xdev->dmas里找DMA,如果找到,就返回對應的的struct xvip_dma的指針。
4.14. 函數xvip_graph_find_entity
函數xvip_graph_find_entity根據指定的設備節點(struct device_node),在xdev->entities里找entity,如果找到,就返回對應的的struct xvip_graph_entity的指針。
5. 關鍵數據
5.1. subdevs
其中subdevs是一個指針,指向(struct v4l2_async_subdev *)的數組(是指針數組),包含了這個設備下的所有subdev的指針,根據遍歷xdev->entities填滿這個數組。xdev->entities由processedxvip_graph_parse_one()根據設備樹找到相關的子設備填充。
5.2. group ID
組ID(struct v4l2_subdev里有成員grp_id。v4l2_subdev_init()里把其初始化為0。Xilinx沒有設置grp_id,所以都是0.)
5.3. xvip_graph_notify_ops
xvip_graph_notify_ops指向bound和complete函數,如果成功匹配設備,.bound()回調函數將會被調用,當所有的子設備全部被加載完畢之后,.complete() 回調函數就會被調用:
6. 后續任務
-
Linux
+關注
關注
87文章
11469瀏覽量
212906 -
Xilinx
+關注
關注
73文章
2183瀏覽量
124471 -
驅動程序
+關注
關注
19文章
859瀏覽量
48894
發布評論請先 登錄
Linux環境再升級:PLIN驅動程序正式發布

RTC芯片有Linux PCA2131驅動程序嗎?
Wilink8 Linux Wi-Fi驅動程序R8.8版用戶指南

用于bq275xx電量計的WinCE/Linux驅動程序
Linux設備驅動程序分類有哪些
linux驅動程序如何加載進內核
linux驅動程序主要有哪些功能
linux驅動程序的編譯方法是什么
linux驅動程序的編譯方法有哪兩種
linux驅動程序運行在什么空間
虹科技術 全新Linux環境PCAN驅動程序發布!CAN/CAN FD通信體驗全面升級!






 工商網監
工商網監
評論