") 閉環(huán)步進(jìn)模式與伺服模式的區(qū)別分析
閉環(huán)步進(jìn)模式與伺服模式的區(qū)別分析

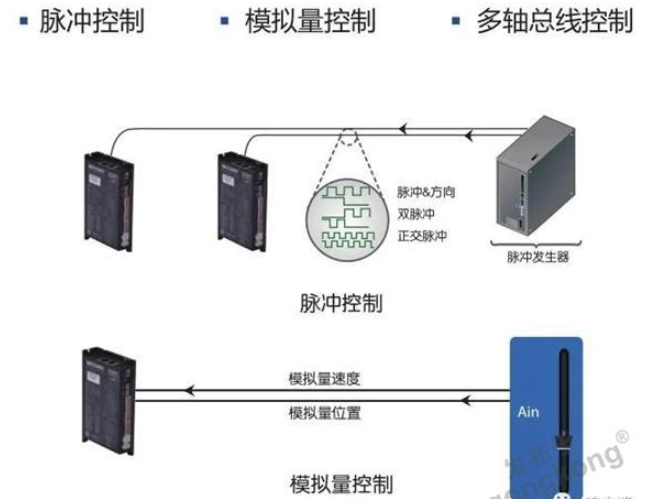
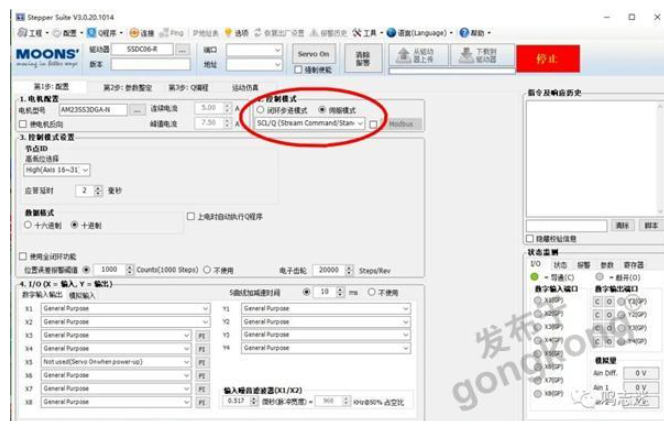
SSDC 系列是一款高性能、智能型總線步進(jìn)伺服驅(qū)動(dòng)系統(tǒng)。將伺服控制技術(shù)融入步進(jìn)系統(tǒng)中實(shí)現(xiàn)閉環(huán)控制,創(chuàng)造出開(kāi)環(huán)步進(jìn)系統(tǒng)難以實(shí)現(xiàn)的優(yōu)異性能。支持多種控制模式,既支持傳統(tǒng)的脈沖控制, 也可以通過(guò) SCL 指令,Modbus,CANopen,eSCL指令,EtherNet/IP 或 EtherCAT 協(xié)議對(duì)驅(qū)動(dòng)器和電機(jī)進(jìn)行實(shí)時(shí)控制,還可以預(yù)先將運(yùn)動(dòng)控制程序存儲(chǔ)到驅(qū)動(dòng)器里(Q 程序),再通過(guò)各種總線通訊指令靈活調(diào)用。
關(guān)于閉環(huán)步進(jìn)模式與伺服模式的區(qū)別是什么呢?
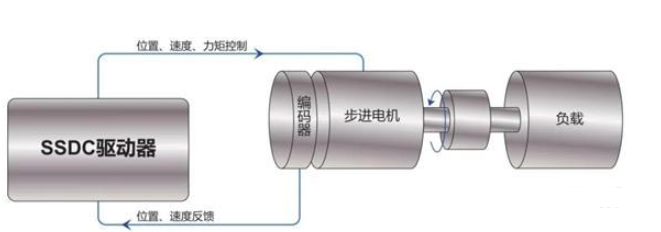
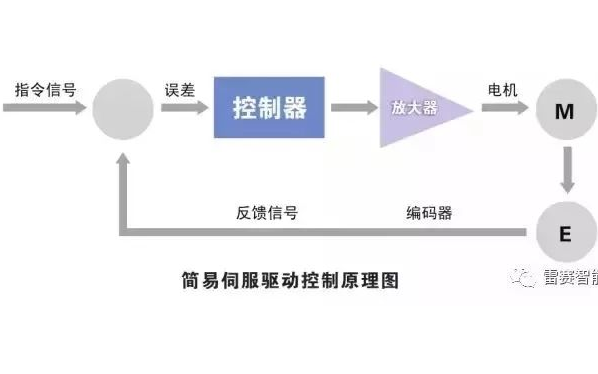
閉環(huán)伺服模式
位置、速度和電流閉環(huán)控制。精確的位置及速度控制以滿足苛刻的應(yīng)用要求;根據(jù)實(shí)際負(fù)載情況實(shí)時(shí)調(diào)整電流大小;高魯棒性的伺服控制可適應(yīng)寬范圍的慣性負(fù)載和摩擦負(fù)載變化。
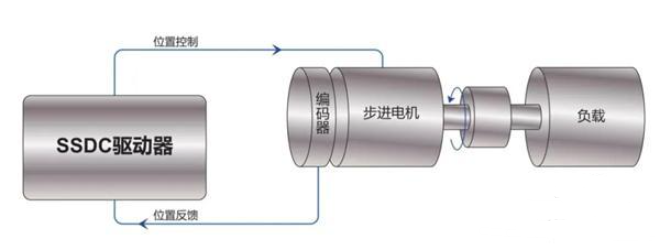
閉環(huán)步進(jìn)模式
位置閉環(huán)控制。極強(qiáng)的易用性,無(wú)需參數(shù)整定,靜止無(wú)抖振,防堵轉(zhuǎn)。
閉環(huán)步進(jìn)模式適用于一些對(duì)于抖動(dòng)要求特別高的特殊應(yīng)用,如:視覺(jué)系統(tǒng),納米科技、半導(dǎo)體制造、噴墨打印機(jī)等。
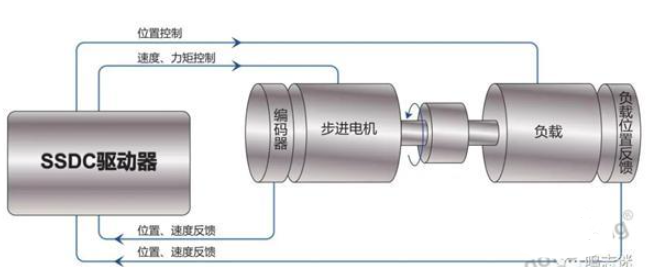
全閉環(huán)模式 —— 兩路位置反饋
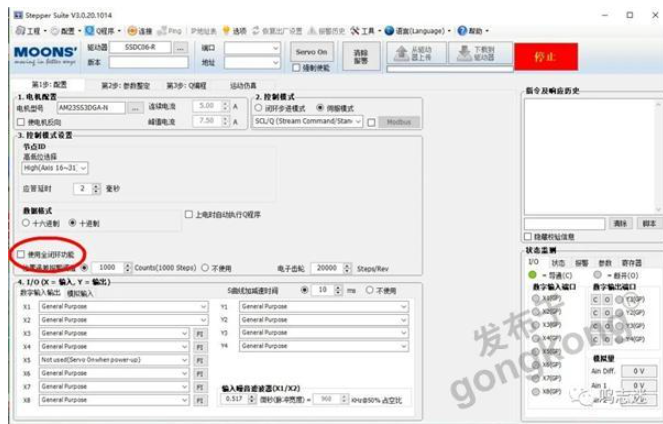
支持兩路位置反饋,一路接電機(jī)內(nèi)部編碼器反饋,另一路可接負(fù)載端外部位置反饋,可避免傳動(dòng)機(jī)構(gòu)機(jī)械誤差帶來(lái)的位置誤差,實(shí)現(xiàn)更精確地位置控制。負(fù)載外部位置反饋類型:光柵尺
總結(jié):
在閉環(huán)伺服模式下運(yùn)行,電機(jī)的力矩可以被100%充分利用,系統(tǒng)設(shè)計(jì)時(shí)無(wú)需考慮力矩冗余。
1、在大多數(shù)應(yīng)用場(chǎng)合,電機(jī)可以最大瞬時(shí)輸出125%-150%的額定力矩,大力矩輸出在某些情況下可以簡(jiǎn)化減速機(jī)構(gòu)的復(fù)雜度。
2、25%-50%過(guò)載能力在短距離,高加減速的應(yīng)用場(chǎng)合將系統(tǒng)優(yōu)化得更加高效。
編輯:hfy
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8697瀏覽量
150012 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
526瀏覽量
32588 -
SSDCL
+關(guān)注
關(guān)注
0文章
2瀏覽量
6705
發(fā)布評(píng)論請(qǐng)先 登錄
【我是電子發(fā)燒友】步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別
以開(kāi)環(huán)或閉環(huán)電流控制模式控制單極和雙極步進(jìn)電機(jī)
步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析
閉環(huán)步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析
閉環(huán)步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別是什么
閉環(huán)步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析
閉環(huán)步進(jìn)電機(jī)與伺服電機(jī)對(duì)比分析哪個(gè)好?
伺服電機(jī)和閉環(huán)步進(jìn)電機(jī)有哪些不同之處
步進(jìn)和閉環(huán)步進(jìn)及交流伺服電機(jī)產(chǎn)品的特點(diǎn)及對(duì)比
步進(jìn)電機(jī)和伺服電機(jī)有什么區(qū)別
步進(jìn)電機(jī)勵(lì)磁模式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論